Clear Sky Science · he
פיתוח רובוט חכם לטיפול בחולים עם ניווט עצמאי משופר באמצעות אופטימיזציית נתיבים במחלקות בית חולים
רובוטים שעוזרים לאחיות, לא מחליפים אותן
בתי חולים ברחבי העולם לחוצים: יותר מטופלים קשישים, יותר מחלות כרוניות, וצוותים שנמצאים תחת עומס כבד. מחקר זה מתאר רובוט חכם לטיפול בחולים שמטרתו אינה להחליף את האחיות, אלא לטפל בעדינות בבדיקות חזרתיות ובבדיקות לילה במחלקות. על ידי תנועה בטוחה ואמינה באופן אוטונומי, הרובוט יכול לסייע לאחיות לזהות מצבי חירום מוקדם יותר — כמו נפילות או חום פתאומי — ובו בזמן להקל על עומס העבודה ולהפחית את הסיכון לתאונות במסדרונות צפופים ובמסגרות דלתות צרות.
מדוע מסדרונות בתי חולים קשים לרובוטים
מבט ראשון במסדרון בית חולים נראה פשוט: קווים ישרים, רצפות נקיות, דלתות סדירות. עבור רובוט זה רחוק מלהיות כך. מיטות, עגלות, קירות, ובעיקר מסגרות דלתות צרות יוצרים מרחבים הדוקים שבהם אפילו טעות קטנה עלולה להוביל להתנגשות. רוב הרובוטים הקיימים נשענים על חבילה של חיישנים וחומרה מורכבת כדי להתמודד עם זה. הצוות מאחורי המחקר בחר בדרך שונה: הם שאפו ליצור רובוט שיוכל לנוע בבטחה באמצעות חיישן עיקרי אחד — סורק לייזר דו־ממדי שמודד מרחקים סביבו — ובשיטת תכנון נתיבים חכמה יותר.

לייצר זוג עיניים נוסף לאחיות
החוקרים פיתחו רובוט חכם לטיפול בחולים (SPCR) על בסיס של משטח גלגלים מסחרי. על גופו התקינו מצלמת תלת־ממד לזיהוי נפילות ולקריאת סימני חיים ללא מגע, וחיישן לייזר דו־ממדי בחלקו העליון לסריקה רציפה של הסביבה במעגל מלא. בתוך הרובוט נמצא מחשב משובץ, סוללות, בקרים למנועים ואלקטרוניקת תקשורת שמאפשרת לו לתקשר עם אפליקציית בקרה ולנהל החלטות נהיגה בעצמו. הרובוט יכול לנוע בכל הכיוונים, לכופף זרוע מצלמה כדי להביט במטופלים, ועוצב לפעול למשך מספר שעות רצופות בתנאי בית חולים אמיתיים.
מפה חכמה במקום עוד חומרה
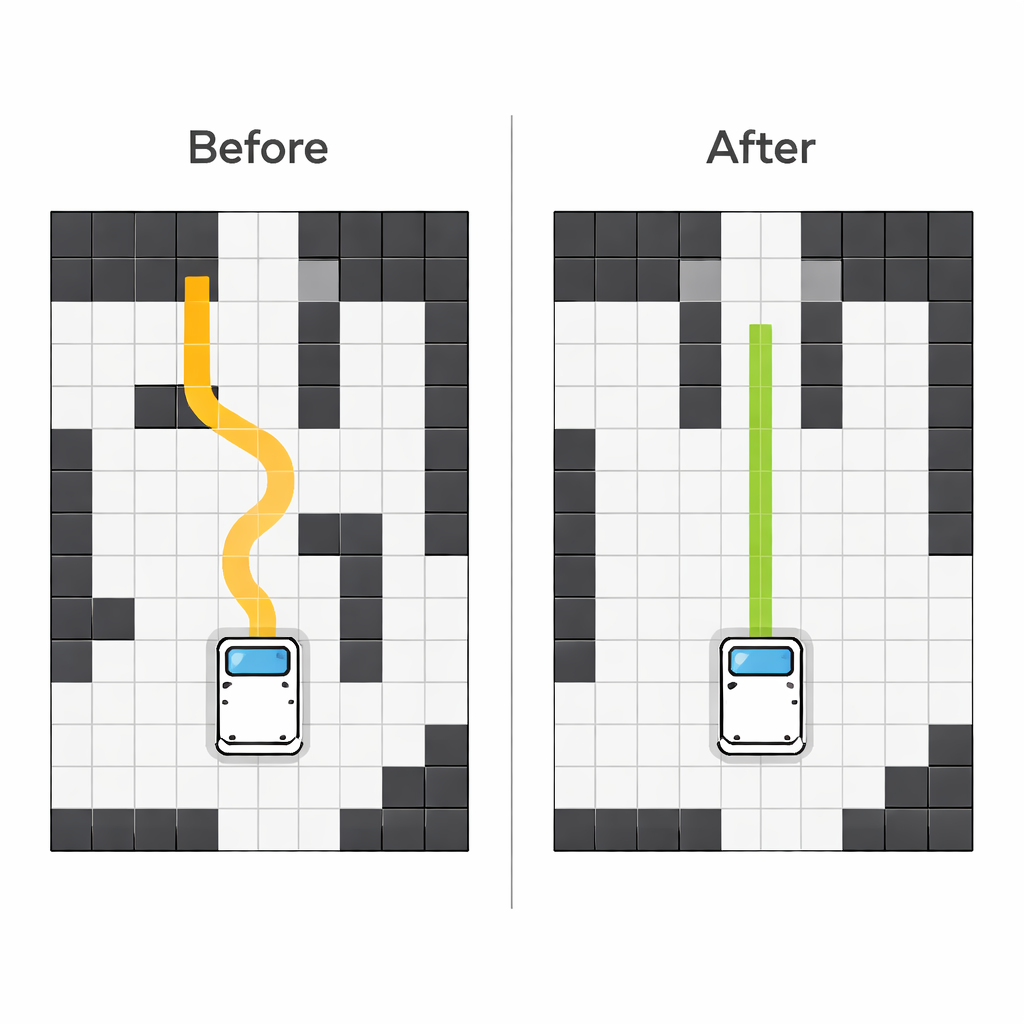
כדי לנווט, הרובוט זקוק תחילה למפה שמסמנת היכן אפשר להזיזו והיכן לא. הצוות התחיל מתכניות מדויקות של מסדרון בית חולים והמיר אותן למפת רשת, שבה כל ריבוע קטן מסומן כשטח פנוי, קיר או מכשול. במקום להשאיר את המפה כפי שהיא, הם עיצבו אותה כך שתהיה זהירה יותר מהמציאות. הם הוסיפו "מרחבי מכשול וירטואליים" — אזורים חסומים נוספים שכברירת מחדל דוחפים את הרובוט רחוק יותר ממקומות מסוכנים כגון קצוות דלתות ופינות צרות. תוכנת תכנון המסלול, המבוססת על גרסה משופרת של אלגוריתם D* Lite, מחפשת כעת במפה הבטוחה הזו נתיבים שמימנעים פניות חדות ושומרים על הרובוט קרוב יותר למרכז המעברים הצרים.
העמסה במבחן במחלקות אמיתיות
המערכת נבדקה במסדרון בית חולים אמיתי שחולק לשלוש מקטעים עם שילובים שונים של מסדרונות, דלתות ומכשולים. הרובוט נדרש לנוע בין נקודות בדיקה, לעבור דרך דלתות סטנדרטיות ברוחב 90 סנטימטר ולהימנע מקירות וחפצים קבועים. מאחר שהרובוט עצמו רחב כ־76 סנטימטר, נותרו לו רק מספר סנטימטרים של מרווח מכל צד כשהוא עובר דרך הדלתות — תנאים שבהם רוב הרובוטים מתקשים. בהשוואה בין ביצועים לפני ואחרי התאמות מפה הגריד, מצאו החוקרים ששיעור ההצלחה של השלמת המסלולים בלי לגעת בכלום קפץ ביותר מ־30 אחוזים בכל המקטעים, עם מסלולים חלקים יותר ופחות תמרונים מיותרים.
מה זה אומר לטיפול בחולים בעתיד
בעבור קהל שאינו מומחה, המסר המרכזי פשוט: במקום להעמיס על רובוטים עוד ועוד חיישנים, המחקר הזה מראה שעיצוב מפות דיגיטליות קפדני ותכנון מסלולים חכם יכולים להפוך רובוטים בבתי חולים לבטוחים ומעשיים יותר. רובוט שיכול בחוסר רעש לעבור בדלתות צרות בלילה, לעקוב אחרי מסלולים יעילים ולבדוק בשקט סימנים בסיסיים של מטופלים, יכול לשחרר את האחיות למוקדי טיפול אנושיים — לנחם משפחות, לקבל החלטות מורכבות ולטפל בחירום. המחברים רואים בעבודה זו בסיס: גרסאות עתידיות יוסיפו חיישנים ושכלולים עשירים יותר בניטור מטופל, בכיוון רובוטים אוטונומיים אמינים שעובדים מסביב לשעון ונעים בבטחה בסביבות בית חולים אמיתיות.
ציטוט: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
מילות מפתח: רובוטים בבתי חולים, ניווט עצמאי, ניטור חולים, מיפוי LiDAR, תכנון מסלולים