על קרקעית הים פועלים כלי רכב תת-מימיים אוטונומיים כשהם עינינו ואוזנינו למחקר אקלימי, לבדיקת תשתיות ולחיפושים והצלות. עם זאת, צוללות-הרובוט הללו נאבקות בבעיה בסיסית: לתקשר ולחשוב בצורה ברורה בסביבה קשה שבה האותות איטיים, רועשים ואנרגיה מוגבלת. מאמר זה מציג דרך חדשה לסייע לרובוטים תת-מימיים לתקשר, לזהות חפצים ולהישאר מאובטחים על ידי שילוב של מציאות רבודה ומדומה עם ענף בבינה מלאכותית שנקרא למידת חיזוק.
מדוע תקשורת תת-מימית כל כך קשה
שידור נתונים מתחת למים קשה בהרבה משידור באוויר. גלים רדיו, שמפעילים Wi‑Fi ו-5G, נספגים במהירות במי הים. אותות אקוסטיים (מבוססי קול) עוברים מרחקים גדולים יותר אך מספקים קצב נתונים נמוך מאוד ועלולים להיתקל בעיכובים, בהדים או בעיוותים. השראה מגנטית עובדת רק על פני כמה עשרות מטרים. מערכות הבקרה הקיימות לרובוטים תת-מימיים מטפלות לעתים קרובות בערוצים האלה בנפרד ומשתמשות בכללים נוקשים לניווט וחישה. זה מקשה על התאמה לשינויי תנאים, מבזבז סוללה וחשוף את קישורי התקשורת להאזנה או למתקפה.
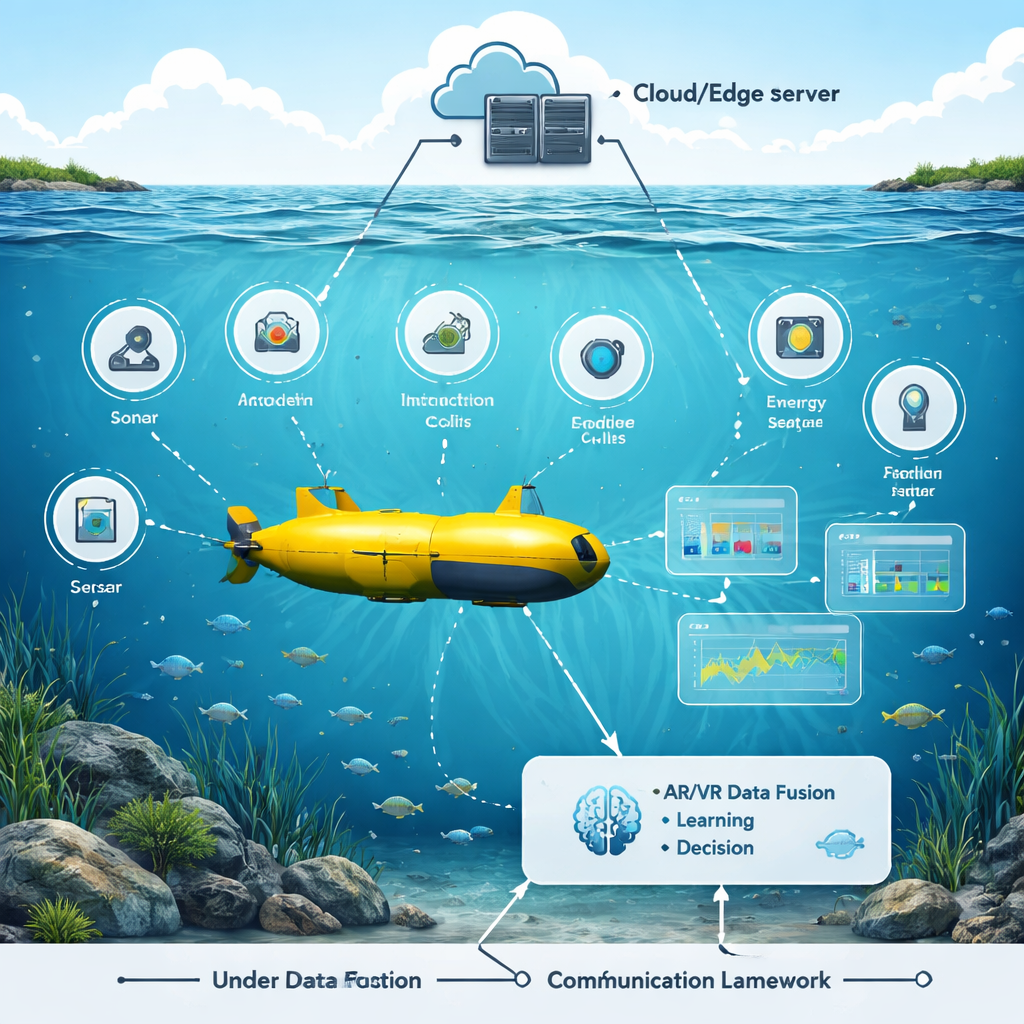
אוקיינוס וירטואלי לאימון אינסטינקטים טובים יותר Figure 1.
המחברים בנו סביבה ניסיונית של מציאות רבודה ומדומה שמדמה עולם תת-מימי שוקק: דגים נעים, סלעים, כלי שיט ומצופים, לצד רעש ריאלי ואובדן אותות במים. כלי רכב תת-מימי מדומה שוטף דרך הסביבה הזו באמצעות חיישנים רבים — סונאר, מצלמות, מודמים אקוסטיים, מדדי אנרגיה ומעקבי מיקום. בסצנה הווירטואלית החוקרים יכולים להזיז בקרים כדי לשנות מיקומי עצמים, תנאי מים והגדרות חיישנים, ולראות מיד כיצד הרובוט מגיב. שכבת ה-AR/VR הזו אינה סתם תצוגת ויזואלים; היא מאחדת זרמי חיישנים גולמיים לתמונה תלת-ממדית אחידה שקל יותר למערכת בינה מלאכותית להבין ולפעול על פיה.
ללמד את הרובוט ללמוד מניסיון
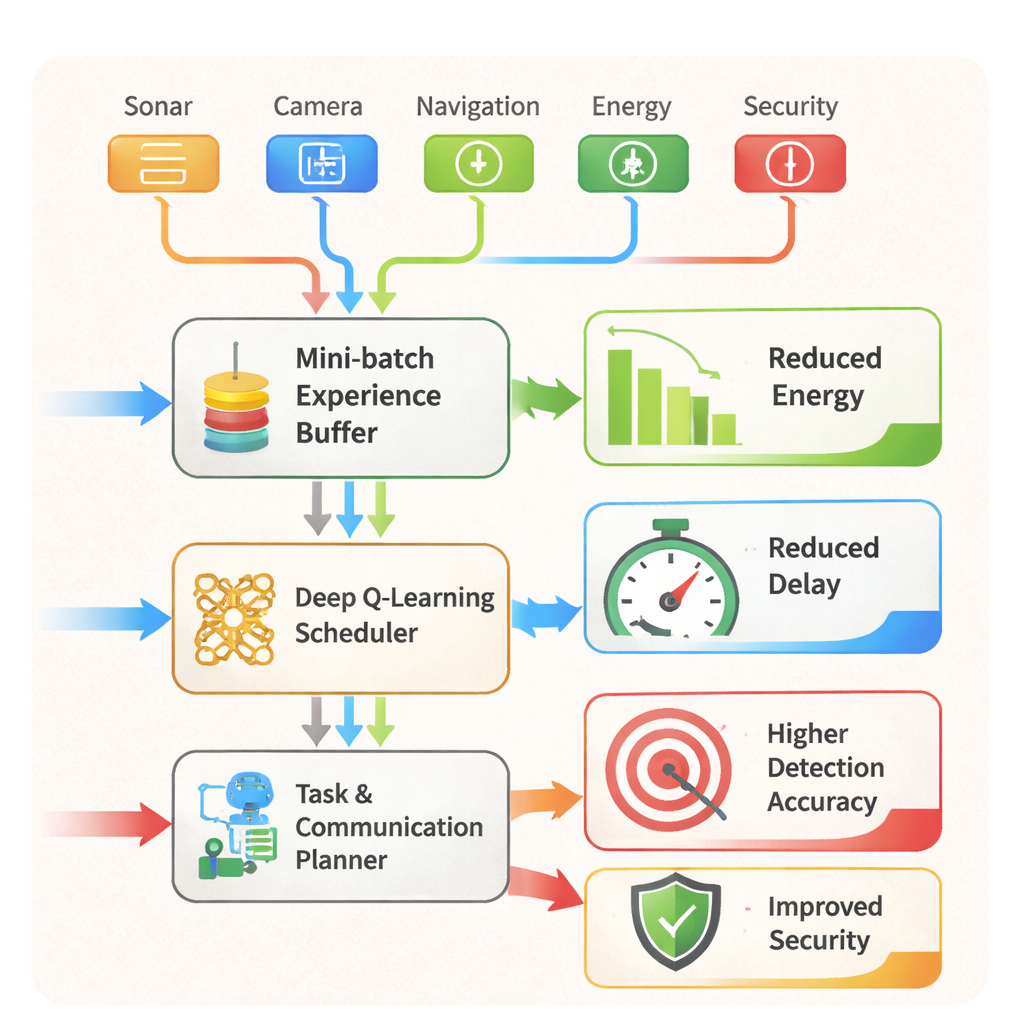
בליבת המסגרת נמצאת אסטרטגיית בינה מלאכותית שהמחברים קוראים לה אסטרטגיית תזמון אדפטיבית של מציאות רבודה ולמידת חיזוק (AARLSS). במקום לפעול לפי תסריט קבוע, הרובוט לומד באמצעות ניסוי וטעייה באוקיינוס הווירטואלי. בכל רגע הוא צופה במצב החישה הממוזג שלו, בוחר פעולה (כמו לשנות מהלך, להתאים תדירות דגימת חיישנים, או להחליף בין תקשורת לטווח קצר ולטווח ארוך), ומקבל תגמול. תגמול זה מאזּן בין ארבע מטרות: חיסכון באנרגיה, הפחתת עיכוב, הורדת סיכון אבטחה, ושימוש פחות במשאבי מחשוב ורשת. רשת Q‑learning עמוקה מאחסנת ומעדכנת את הערך הצפוי של החלטות שונות, באמצעות מיני-אצוות של חוויות עבר השמורות בזיכרון שיחזור כדי שהרובוט יוכל ללמוד גם מסיטואציות עדכניות וגם ממצבים ישנים יותר.
מתזמון חכם למשימות בטוחות יותר Figure 2.
AARLSS פועלת גם כמנהל תזמון בזמן אמת. היא מחליטה אילו משימות — ניווט, זיהוי עצמים, תקשורת או בדיקות אבטחה — צריכות לפעול היכן ומתי, והאם יש לעבד נתונים על הרובוט, להעבירם לשרת קצה, או לדחותם. מעל לכך, מערכת לגילוי חדירות המובנית סורקת כל הזמן תבניות בנתוני חיישנים ורשת כדי לסמן אנומליות שעשויות להעיד על מתקפה או תקלה, והיא יכולה להפעיל פעולות הגנה כגון חסימת קישורים מסוכנים או אילוץ חישוב מקומי בלבד. במבחנים בתוך סימולטור ה-AR/VR המסגרת התעלתה על מספר שיטות מבוססות למידת חיזוק. היא הקטינה את צריכת האנרגיה של כלי הרכב התת-מימי בכ־20%, צמצמה את עיכובי התקשורת והמשימות בכ־18–20%, והגבירה את דיוק זיהוי העצמים לכ־97–98%, גם במהלך манёвры מורכבים ובסצנות צפופות.
מה זה אומר לאוקיינוסים בעולם האמיתי
ללא מומחים, המסר המרכזי הוא שהמחקר הזה מצביע לכיוון של רובוטים תת-מימיים עצמאיים, יעילים ואמינים יותר. על ידי אימון באוקיינוס וירטואלי עשיר ולמידה לאזן בו זמנית אנרגיה, זמן, דיוק ואבטחה, AARLSS מאפשר לכלי לבחור מתי לדבר, מתי להקשיב ומתי להשתוקק כדי לחסוך כוח — וכל זאת תוך שמירה על עין חדה על סביבתו והגנה על הנתונים שלו. אף שאלה התוצאות מתקבלות מסימולטור מתוחכם ולא ממים פתוחים, הן מרמזות שצי עתידי של רובוטים תת-מימיים יכול להתמודד עם משימות ארוכות, בטוחות ועשירות בנתונים עם פחות פיקוח אנושי, ובכך לשפר תחומים שמתחילים במדעי הים ועד בדיקות תעשייה חופית.
ציטוט: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
מילות מפתח: רובוטיקה תת-מימית, כלי רכב תת-מימיים אוטונומיים, למידת חיזוק, מציאות רבודה, תקשורת תת-מימית