Clear Sky Science · he
אלגוריתם משופר של העיט-המשחור לפתירת פרמטרים של תקיפה קינטית שאינה קטלנית למטרות נעות
כלים בטוחים יותר לפיזור הפגנות
צבאות מודרניים וכוחות משטרה נתונים ללחץ לשלוט במצבי סכנה מבלי לגרום למוות מיותר. קליעי גומי ונשקים אחרים המכונים "אינם קטלניים" אמורים לנטרל אדם לזמן קצר, אך כותרות מראות שהם יכולים עדיין לעוור או להרוג. מאמר זה מתמודד עם שאלה מעשית מאוד: איך נבחר את אופן הירי כדי לעצור אדם נע במהירות, תוך שמירה על הסיכון לפגיעה קשה במינימום?
למה הירייה הנכונה חשובה
ברגע שהפרויקטיל עוזב את הקנה של נשק לא מונחה, נתיבו נקבע על‑ידי הגדרות הירי: מהירות פה הקנה, זווית גובה, וזווית סטייה לצד. עבור נשקים שאינם קטלניים, שגיאות קטנות בהגדרות אלה יכולות להכריע בין חבורה לבין פגיעה מסכנת חיים, במיוחד כאשר אנשים רצים, מתכופפים או מסתתרים מאחורי מחסה. טבלאות ירי מסורתיות ומפצלים נומריים שלב‑אחר‑שלב יכולים לחשב הגדרות אלה, אך לעתים קרובות הם איטיים, בלתי גמישים ומותאמים לנשקים קטלניים לטווח ארוך יותר ולא לכלי שליטה על המון לטווח קצר. המחברים מציגים את הבעיה כמשימת אופטימיזציה: מבין כל הגדרות הירי האפשריות, למצוא את אלה שפוגעות במטרה נעה בתוך סטייה קטנה, מגיעות אל המטרה במהירות ומסירות פגיעה שמספיקה לנטרל אך סבירה שלא תהפוך קטלנית.
להפוך מטרות נעות לחידת גיאומטריה
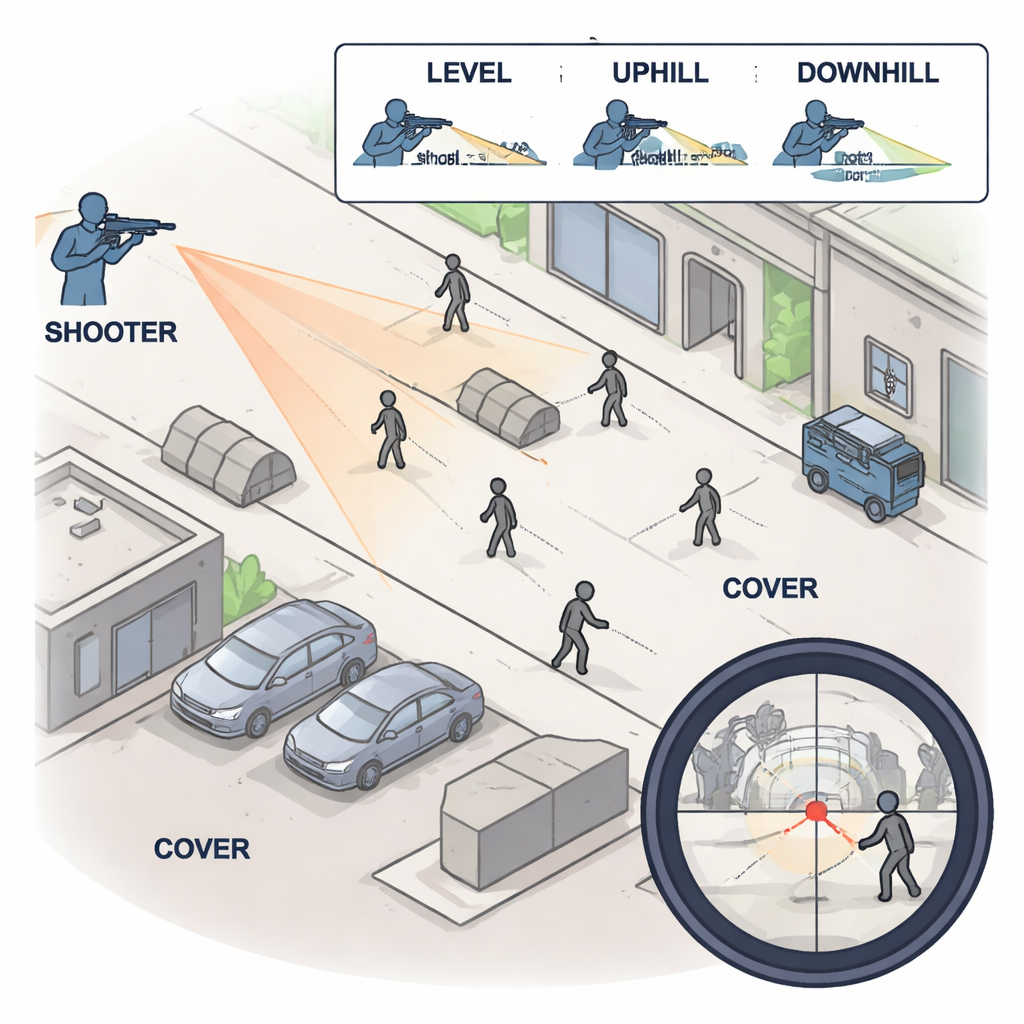
כדי לשקף פעולות בשטח, הצוות בונה מודל תלת‑ממדי של "משולש פגיעה". פינה אחת היא היורה, השנייה היא מיקום המטרה בעת ירי, והשלישית היא המקום שבו המטרה תהיה כאשר הפרויקטיל יגיע. השלושה הצלעות מייצגות את טיסת הפרויקטיל, תנועת המטרה וקו ההשפעה הסופי. סביב המטרה מציירים כדור קטן המגדיר מרחק החטאה מקובל, ומגבילים כמה רחוק המטרה יכולה לזוז לפני הפגיעה. הפיזיקה הבסיסית משתמשת במודל בליסטי מצומצם שמתחשב בכוח הכבידה ובלחץ האויר אך מתעלם מתופעות הרלוונטיות בעיקר לארטילריה לטווח ארוך. מעל זה, המחברים מטילים גבולות על מהירות פה הקנה, עליה וזווית סטייה, דורשים שהפרויקטיל לא יפגע קודם באדמה ומשלבים את הכל לציון יחיד המשקף דיוק פגיעה, מהירות סופית וכמה רחוק המטרה הצליחה לרוץ לפני עצירה.
להגדיר מה משמעות "אינו קטלני" באמת
חישוב הגדרות ירי מדויקות חסר תכלית אם איננו יודעים גם איזה רמת פגיעה מקובלת. בהתבסס על עשורים של דוחות רפואיים מעימותים ומהומות, המחברים מראים שפגיעות בראש, בצוואר ובחזה אחראיות לרוב המקרים של מוות ופציעות הרסניות מקורע גומי. לעומת זאת, פגיעות באיברים (גפיים) ובבטן נוטות הרבה יותר לגרום לכאב זמני ואובדן תנועה ללא סיבוכים קטלניים. לכן הם מתייחסים לגפיים ולבטן כאזורי מטרה מועדפים ומוציאים מן המשחק אזורים כגון הראש, החזה, עמוד השדרה והמפשעה. הם מנתחים נתוני בדיקה עבור פרויקטיל גומי בקוטר 18.4 מ״מ הנפוץ בסין, וקושרים את מהירותו בטווחים שונים לכמות הנקראת אנרגיה קינטית ספציפית (אנרגיה על יחידת שטח פגיעה) ולמדד "קְהִיּוּת" שתלוי גם בגודל גוף ועובי רקמות. באמצעות מידות גוף של מבוגרים סיניים בגילאים ובמגדרים שונים, הם גוזרים עקומות שמקשרות מהירות פגיעה לחומרת הפציעה ובוחרים מהירות סופית—כ‑80 מטרים לשנייה—גבוהה מספיק כדי לעצור את רוב המבוגרים אך סטטיסטית קשורה רק לפציעות קלות.
חישוב בהשראת טבע לקבלת החלטות בשבריר שנייה
מציאת השילוב הטוב ביותר של מהירות פה הקנה וזוויות תחת כל התנאים האלה היא בעיית חיפוש תובענית. המחברים מתחילים מהאלגוריתם שהוצע לאחרונה, אלגוריתם העיט‑המשחור, מטה‑הריסטיקה המחקה כיצד ציפורים קטנות מרחפות, צוללות ומיגרדות במהלך הציד. הם מחזקים אותו לגרסה "IBKA" (עיט‑משחור משופר) עם ארבעה רעיונות. ראשית, הם משתמשים ברצף המרסלי (Hammersley) כדי לזרוע את אשכול הפתרונות ההתחלתי באופן אחיד יותר בחלל החיפוש. שנית, הם שואלים התנהגות הימנעות משיטה אחרת בהשראת בעלי חיים כדי שאותן "ציפורי" וירטואליות יוכלו לברוח מאזורי רעה במקום להתקבץ מוקדם מדי. שלישית, הם מפצים על הקפיצות האקראיות המקוריות בטיסות לוי (Lévy flights), דפוס של תנועות קצרות רבות ולעיתים נדירות קפיצות ארוכות הידוע ביעילותו בחקר נופים מורכבים. ולבסוף, הם מוסיפים שלב מוטציה משולש שמדחף פתרונות בתוך משולש שנוצר על‑ידי המועמד הטוב ביותר, השני בטיבו והגרוע ביותר, מה שמשפר חדות רזולוציה מקומית תוך שמירה על גיוון.
בדיקת האלגוריתם והשפעתו בעולם האמיתי
החוקרים בוחנים ראשית את IBKA על סט מבחנים בינלאומי תובעני של 29 פונקציות מתמטיות שמייצגות נופים חלקים, מחוספסים, מעורבים והרכבים. בהשוואה לשבעה אלגוריתמים מתחרים פופולריים—כולל אופטימיזציית מושבת חלקיקים וכמה שיטות בהשראת בעלי חיים חדשות יותר—IBKA מוצא פתרונות טובים יותר בכ‑4 מתוך 5 מקרים ומראה התכנסות מהירה ומהימנה יותר. לאחר מכן הם מזינים את מודל הבליסטיקה הלא‑קטלנית לכל האלגוריתמים ומדמים שלוש סיטואציות ירי מציאותיות: יריות אופקיות לעבר מטרה מהירה מרחוק, יריות מעלה לעבר מטרה מהירה קרובה, ויריות מטה לעבר מטרה איטית מרחוק. בכל שלושת התרחישים, IBKA מחשב באופן עקבי פרמטרי ירי שפוגעים במטרה הנעה עם השגיאה המרחבית הקטנה ביותר, שומרים על מהירות סופית הקרובה ביותר לערך הלא‑קטלני הנבחר, ועושים זאת עם חזרתיות גבוהה. הפתרונות שלו גם מפיקים את שיעורי ההצלחות הגבוהים ביותר של פגיעה ללא פגיעה בקרקע בניסויים חוזרים, דרישה מרכזית לכל מערכת בקרת אש עתידית.
מה זה אומר לנשקי שליטה על מהומות בעתיד
כדי שנשקים שאינם קטלניים יעמדו בשמם, יש לשלבם עם גבולות רפואיים ברורים וחישוב מהיר ומהימן של אופן הירי בתוך גבולות אלה. המחקר מראה כיצד שניהם ניתנים לבנייה: על‑ידי עיגון "פגיעה מקובלת" בנתוני פציעה ומידות גוף אנושיות, ועל‑ידי שימוש באלגוריתם בהשראת הטבע ומותאם בקפידה לחיפוש בחלל אפשרויות הירי בזמן אמת. אם ישולבו בחלקות חכמות וביחידות בקרת אש, גישות כמו IBKA יכולות לסייע למפעילים אנושיים לבחור יריות שסביר יותר שיעצרו אדם נע במהירות ובמקביל יפחיתו באופן משמעותי את הסיכון לנזק קבוע. המחברים מדגישים שמערכות כאלו חייבות להישאר בפיקוח אנושי ותוך גבולות חוקיים ואתיים, אך טוענים שמדע ומחשוב טובים יותר יכולים להפוך שימוש בלתי נמנע בכוח לבטוח יותר במידה משמעותית.
ציטוט: Li, Y., Gu, T. & Wan, Q. An improved black-winged kite algorithm for solving non-lethal kinetic strike parameters for moving targets. Sci Rep 16, 6257 (2026). https://doi.org/10.1038/s41598-026-36642-8
מילות מפתח: נשקים שאינם קטלניים, בליסטיקה, אלגוריתם אופטימיזציה, קליעים גומי, מערכות בקרת אש