Clear Sky Science · he
החלטת NBV היררכית מבוססת מידע הדדי ל-SLAM חזותי סמנטי פעיל בסביבות דינאמיות
רובוטים שיכולים לחשוב קדימה
כשמכונות יוצאות מהמפעלים ונכנסות לבתים, בתי חולים ומשרדים, עליהן לנווט במרחבים המלאים באנשים וחפצים נעים אחרים. מאמר זה מציג שיטה חדשה לאפשר לרובוט «לחשוב קדימה» לגבי היכן להביט וכיצד לנוע כדי לבנות מפה אמינה של סביבתו—even כאשר האובייקטים בסביבה מסרבים להישאר במקום. העבודה חשובה לכל מי שמעוניין ברובוטי שירות בטוחים יותר, ברחפנים חכמים למשלוח או בעוזרי בית עתידיים שיצטרכו לחלוק מרחב עם בני אדם במקום מסדרונות ריקים.
מדוע אנשים נעים מבלבלים את הרובוטים
כדי לנוע באופן עצמאי, רוב רובוטים משתמשים בטכניקה הנקראת SLAM חזותי, שבה מצלמה מסייעת לבנות מפה ולהעריך את המיקום בו-זמנית. זה עובד היטב בסביבות סטטיות אך קורא להתמוטטות כאשר אנשים עוברים, חוסמים את השדה או נושאים חפצים. תיקון נפוץ הוא להשתמש בראיה «סמנטית» כך שהרובוט יזהה אנשים, מכוניות וכיסאות ויפסול אותם בעת בניית המפה. עם זאת, זה יוצר בעיה חדשה לרובוטים פעילים שבוחרים נתיבים בעצמם: אם הם מזניחים יותר מדי רמזים חזותיים, הם עלולים לאבד לגמרי את מעקב המקום שלהם. שדה הראייה המצומצם של המצלמה מקשה עוד יותר את העניין, כי אדם שעובר קרוב יכול להסתיר רוב הנוף השימושי מעיני הרובוט.
אסטרטגיה דו-רמתית לבחירת היכן להביט הלאה
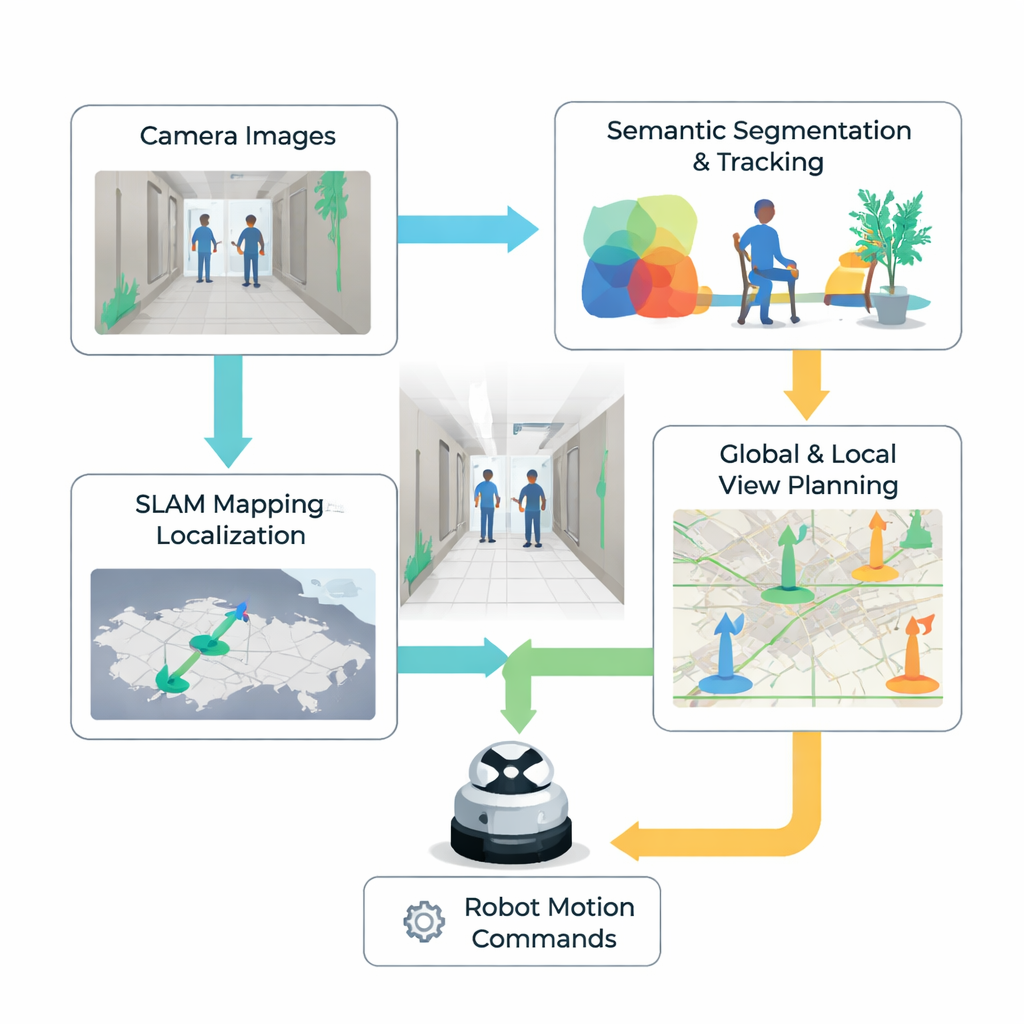
המחברים מציעים מערכת החלטה היררכית המסייעת לרובוט לבחור נקודות תצפית בצורה מושכלת יותר. ברמה העליונה, הרובוט שומר מפה גרידית ממבט ציפור של אזורים חופשיים, מאוכלסים ובלתי ידועים. הוא מעריך נקודות תצפית מרוחקות אפשריות על ידי אומדן עד כמה כל אחת מהן תפחית את חוסר הוודאות במפה—מונח שנשאב מתורת המידע. הרובוט מעדיף מקומות שיגלו אזורים גדולים לא נחקרים, תוך שקלול המרחק שעליו לנסוע וכמות הסיבוב הנדרשת למצלמה. לאחר בחירת אזור מבטיח, תהליך ברמה נמוכה נכנס לפעולה על מנת לכוונן בדיוק כיצד הרובוט צריך לזוז ולהסתכל בתוך אותה שכונה, כדי שיוכל לראות מספיק פרטים שימושיים עם שדה הראייה הצר של המצלמה.
לראות מה יציב ולדהור ממה שלא
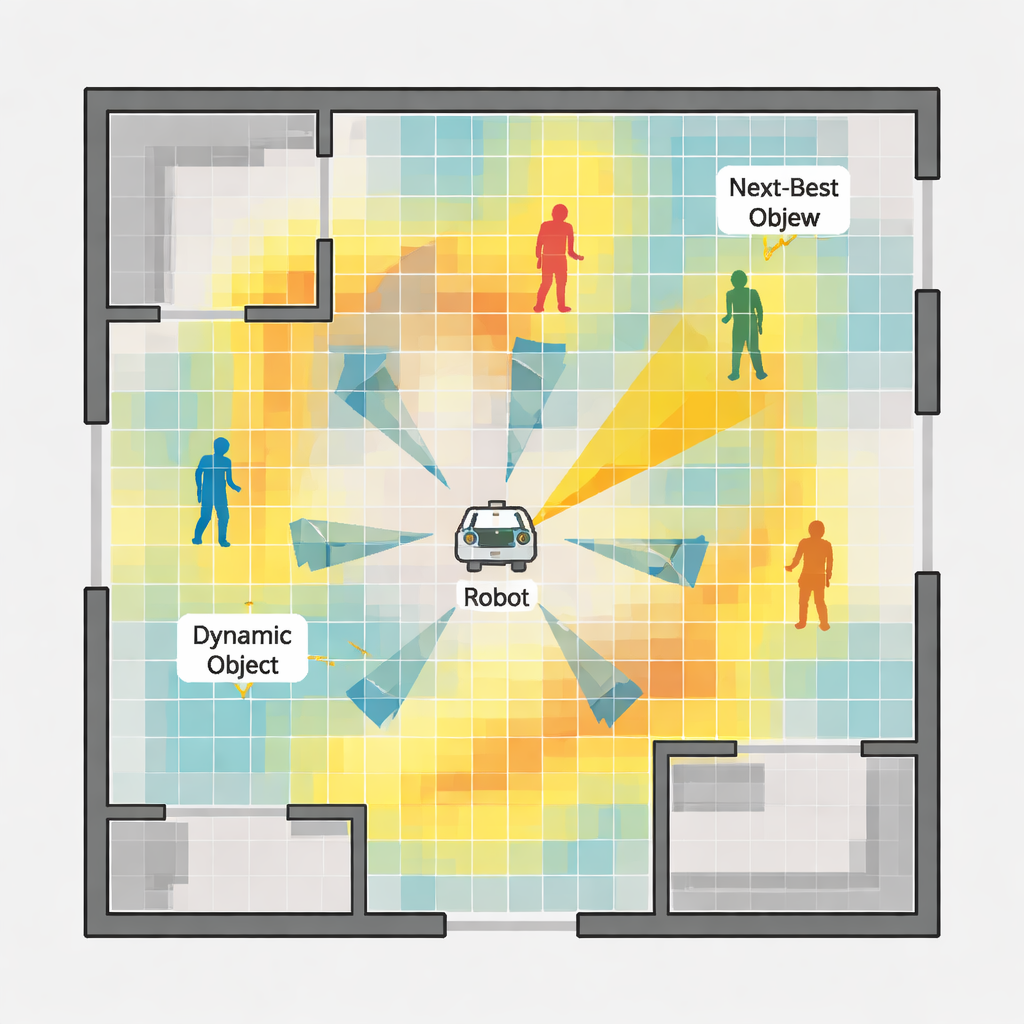
במרכז תהליך ההחלטה המקומי נמצא «מפת הסתברות תכונות» הנבנית מכל תמונת מצלמה. תחילה המערכת מזהה נקודות ציון חזותיות—פינות ותבניות בסצנה—שנוטות להישאר יציבות לאורך זמן ושמסייעות במעקב תנועה. לאחר מכן היא משתמשת בגלאי עצמים מודרני כדי לזהות אובייקטים שעשויים לזוז, כגון אנשים, ומעקבת אחריהם בפריימים שונים. על ידי ניתוח תנועת האובייקטים הללו, המערכת מעריכה לא רק היכן הם נמצאים כעת, אלא גם היכן סביר שיהיו בעתיד הקרוב. שני מקורות המידע האלה מתמזגים למפת חום על פני התמונה: אזורים בהירים מציינים סיכוי גבוה לראות נקודות יציבות ואמינות, בעוד אזורים כהים מסמנים מקומות עניים בתכונות או צפויים להיות מכוסים על ידי אובייקטים נעים. הרובוט משתמש במפה הזו כדי לשפוט איזו תנועה קטנה—סיבוב שמאלה, ימינה או תנועה קדימה—תעניק לו את התצפית הברורה והיציבה ביותר להמשך.
בדיקות בעולם מדומה ובאמיתי
החוקרים בחנו את הגישה שלהם בשני חללי פנים מדומים בעלי גדלים ומורכבות שונים, כל אחד מאוכלס בהולכי רגל וירטואליים משוטטים, ולאחר מכן על רובוט פיזי שנע בסביבה פנימית אמיתית. הם השוו את שיטתם מול מספר אסטרטגיות חקר מבוססות שמטרתן בעיקר לכסות שטח או לקצר מרחק נסיעה. בסימולציות, המערכת החדשה ייצרה מפות עם עיוותים מופחתים והשיגה דיוק מיקום טוב יותר תוך חקירה בזמן דומה או קצר יותר. היא גם הייתה פחות נוטה לאבד את מיקומה או להתקרב בצורה לא נעימה לאנשים נעים. בניסוי בעולם האמיתי, השיטה רצה בזמן אמת על מחשב רובוט מסחרי, ואישרה שהיא מעשית לפריסה מחוץ למעבדה.
מה משמעות הדבר עבור רובוטים יום-יומיים
במילים פשוטות, עבודה זו מלמדת רובוט להיות בררן לגבי מקום הראייה והיעד שלו כשהאנשים נוכחים. על ידי שילוב הבנת סצנה, חיזוי תנועה ומדד של רווח מידע, הרובוט יכול לנווט לעבר תצפיות שמועילות ובטוחות גם יחד, במקום פשוט לצעוד לפינה הבלתי נחקרת הקרובה ביותר. זה הופך את המפה הפנימית לאמינה יותר ואת התנועות לצפויות יותר—מרכיבים מרכזיים לרובוטים שצריכים לחלוק מרחבים צפופים עם בני אדם. אתגרים נשארים—כמו קהל גדול פתאומי החוסם את המצלמה—אך הגישה מסמנת צעד לעבר רובוטי בית ושירות שיכולים להתמודד בחן עם הטבע העמוס והדינמי של החיים האמיתיים.
ציטוט: Yang, Z., Sang, A.W.Y., Muthugala, M.A.V.J. et al. Mutual information-based hierarchical NBV decision for active semantic visual SLAM under dynamic environments. Sci Rep 16, 5847 (2026). https://doi.org/10.1038/s41598-026-36259-x
מילות מפתח: SLAM פעיל, ניווט רובוטי, סביבות דינמיות, מיפוי סמנטי, הנקודה הבאה הטובה ביותר