Clear Sky Science · he
בקרת חזויה מונעת למידה חיזוקית לאופטימיזציה של מנוע סינכרוני עם מגנט קבוע נגד-סיבובי במערכת הנעת צוללת
מנועים חכמים לצוללות מושתקות יותר
צוללות מודרניות תלויות בהנעה שקטה ויעילה כדי לחקור את האוקיינוסים ולבצע משימות מדעיות, מסחריות או ביטחוניות. מחקר זה בוחן סוג מיוחד של מנוע חשמלי שמניע שתי מדחפים בכיוונים מנוגדים, ומסייע לצוללת לנוע בצורה חלקה ושקטה במים. החוקרים מראים כיצד שילוב כלי חיזוי מתקדמים עם אלגוריתם למידה יכול לשמור על יציבות ויעילות של מנועים אלה, גם כאשר גלים, זרמים ומנופים פתאומיים מפריעים להם.
שני מדחפים, צוללת יציבה אחת
מערכות מדחף יחיד מסורתיות יכולות לגרום לצוללת להסתובב ולהטות את הגוף, במיוחד במהירויות גבוהות, מה שמקשה על ההיגוי ומגביר את החשיפה לגילוי. כדי למנוע זאת, מהנדסים משתמשים במערכות מדחפים נגד-סיבוביים: שני מדחפים המותקנים על אותו ציר אך מסתובבים בכיוונים מנוגדים. בלב תצורה זו נמצא מנוע סינכרוני עם מגנט קבוע נגד-סיבובי (CRPMSM), שהוא למעשה שני מנועים חשמליים קומפקטיים בעלי מומנט גבוה המורכבים זה על זה. סידור זה מבטל כוחות סיבוב בלתי רצויים, משפר את ניצול האנרגיה ומפחית רעש — כל אלה חשובים להישארות בלתי מורגשת ולביצוע משימות ארוכות מתחת לפני הים. עם זאת, כאשר העומס על שני הרוטורים אינו מאוזן, למשל במים סוערים או בפניות חדות, שמירה על סנכרון מושלם בין הצדדים מהווה אתגר בקרה משמעותי. 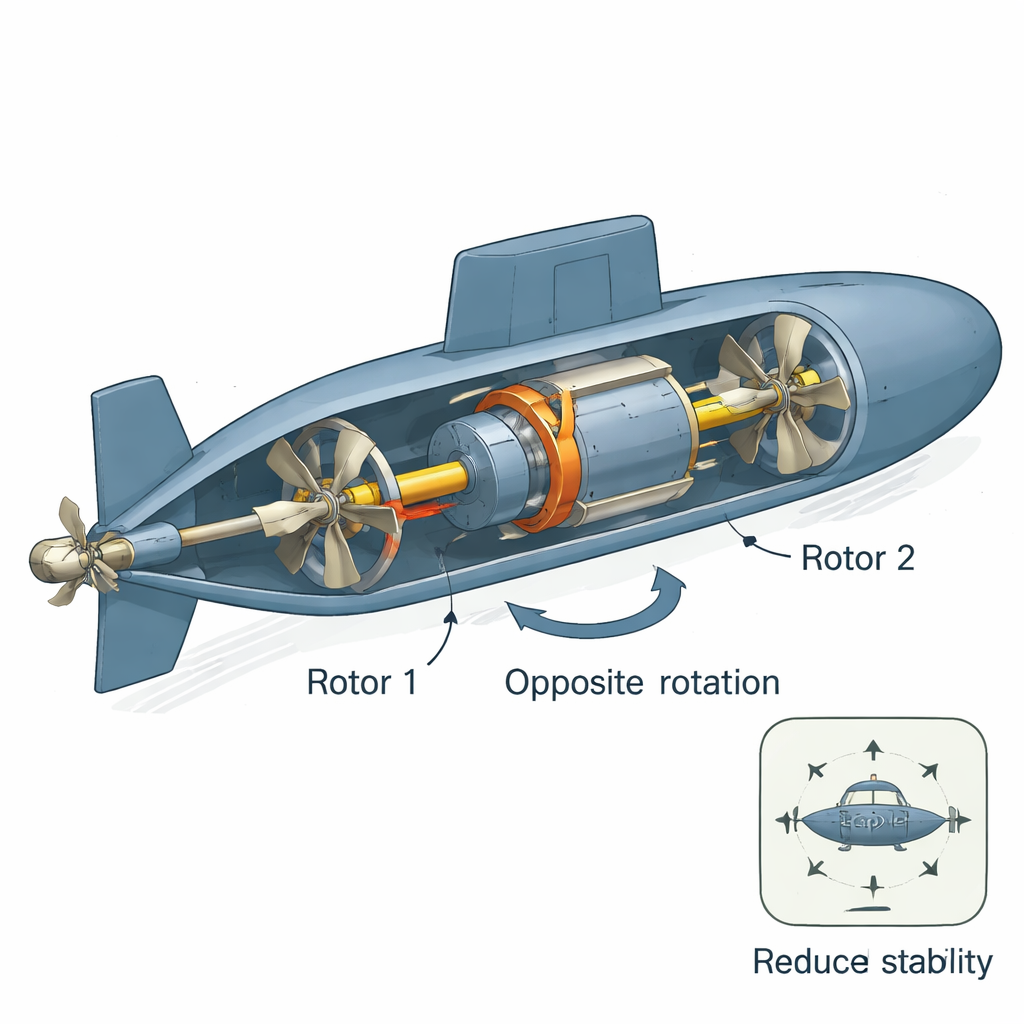
מדוע בקרות מקובלות אינן מספקות
מהנדסים ניסו אסטרטגיות בקרה רבות כדי לשמור על סנכרון ויעילות רוטורי ה-CRPMSM. שיטות כמו בקרה מונחית שדה (FOC) ובקרה ישירה של מומנט יכולות לתפקד היטב בתנאים שקטים ויציבים, אך מתקשות כאשר הסביבה התת-ימית משתנה במהירות או הופכת לא-סימטרית. טכניקות מתקדמות יותר כגון מצב החלקה, בקרה פאזית וטיפול אדפטיבי משפרות את העמידות, אך לעתים קרובות הן תלויות במודלים מתמטיים מדויקים של המנוע והסביבה. בפועל, אותם מודלים אף פעם אינם מושלמים, והאי-התאמות עלולות להוביל לעלייה בריפל של מומנט, להאטת ההתאוששות מההפרעות ולבזבוז אנרגיה. בקרה חזויה מודלית (MPC), המתכננת מהלכי בקרה אופטימליים לטווח קצר לעתיד, מציעה תגובה מהירה אך עדיין קשורה באופן הדוק לאיכות המודל הבסיסי.
בודק היברידי שלומד תוך כדי עבודה
המחברים מציעים מסגרת היברידית של בקרה חזויה מודלית מונעת למידה חיזוקית (RL-MPC) המאחדת את יתרונות שתי הגישות. MPC משתמש במודל מתמטי של ה-CRPMSM כדי לנבא כיצד זרמים, מומנט ומהירות יתפתחו במהלך כמה צעדי בקרה קדימה ובוחר פקודות מתח שעתידות לעקוב אחר יעדי מהירות וזרם תוך כיבוד מגבלות. מעל זאת, סוכן למידה חיזוקית מבוסס על אלגוריתם Twin Delayed Deep Deterministic Policy Gradient (TD3) צופה כיצד המנוע האמיתי מתנהג. על ידי קבלת תגמולים כאשר שגיאות המהירות, שגיאות הזרם ומאמץ הבקרה קטנים, הסוכן הלומד מתאים בהדרגה את תפוקות ה-MPC כדי לפצות על שגיאות מודל, עומסים לא מאוזנים והפרעות חיצוניות. שלב מודולציית רוחב פולס במרחב הווקטורי (SV-PWM) ממיר לאחר מכן את פקודות המתח הממוינות לאותות החלפה לאינברטר המניע את המנוע.
בחינת המנוע החכם
כדי להעריך את הגישה שלהם, החוקרים בנו סימולציה מפורטת של מערכת מנוע נגד-סיבובית בהספק 120 קילוואט ב-MATLAB/Simulink ובדקו אותה תחת שלוש תרחישי פעולה מציאותיים. בתרחיש הראשון המנוע פעל במהירות קבועה בעוד שהעומס על שני הרוטורים השתנה אך נותר מאוזן; בתרחיש השני המהירות השתנתה תחת עומס קבוע; ובתרחיש השלישי, המאתגר ביותר, הרוטורים חוו עומסים שונים בעוד נקודת ההגדרה של המהירות נשמרה קבועה. בכל מקרה הושווה RL-MPC ישירות עם MPC קונבנציונלי תוך שימוש באותו אופק חיזוי ובקרה. 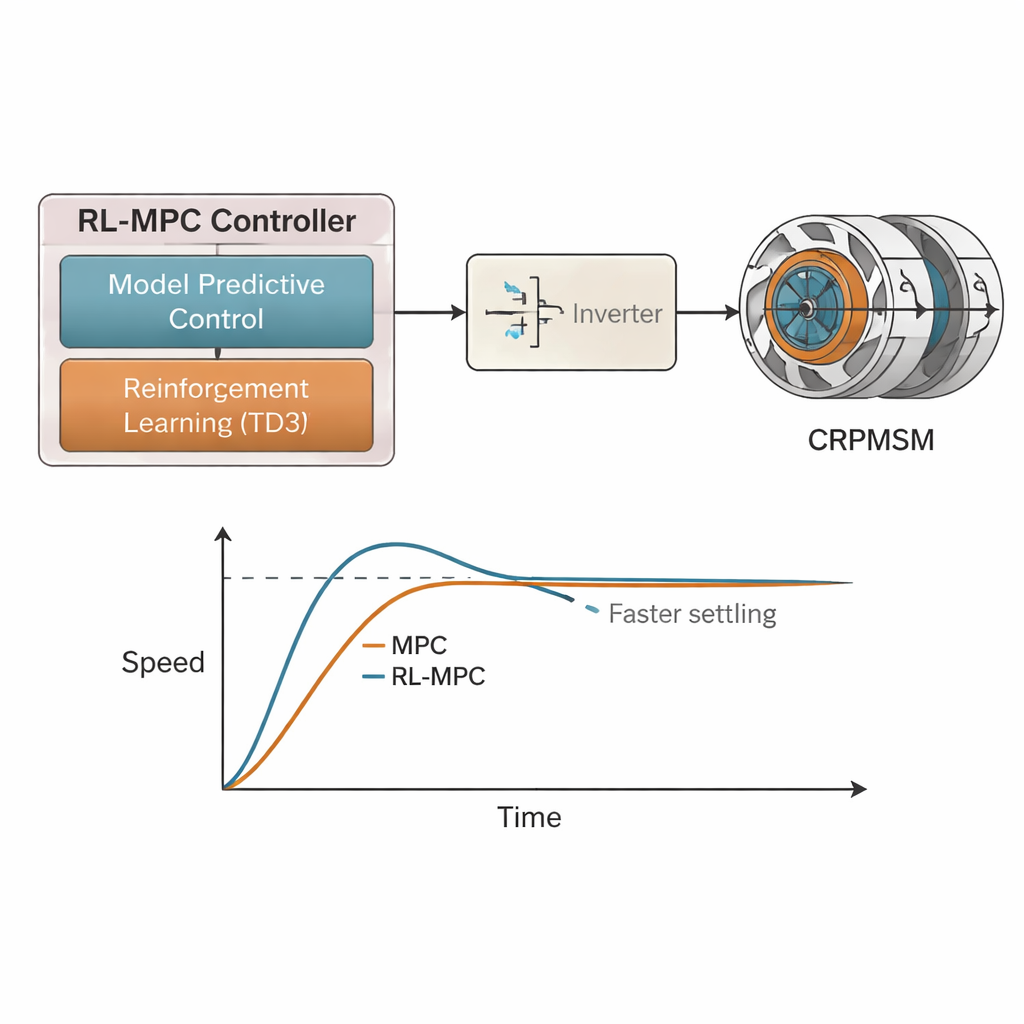
תגובה מהירה יותר, זרמים נקיים יותר, סנכרון משופר
בקר היברידי RL-MPC הציג ביצועים טובים באופן עקבי בהשוואה ל-MPC סטנדרטי בכל המבחנים. כאשר העומסים או המהירויות השתנו באופן פתאומי, RL-MPC קיצר את העודף במהירות מ‑כ‑30% לכ‑15–16.6% וכיסה זמן השהייה חצי — מכ‑1.4 שניות בקירוב לכ‑0.7 שניות. רעידות מומנט (torque ripple) קטנו, ושני הרוטורים נגד-הסיבוב נשארו מסונכרנים בצורה הדוקה, גם כאשר רוטור אחד היה עמוס יותר מהשני. לא פחות חשוב — איכות הזרמים בסטטור השתפרה באופן ניכר: הסטייה ההרמונית הכוללת (THD) ירדה ביותר מ‑60% במהלך מעברי עומס לא מאוזנים קשים, מירידה של 9.3% ב‑MPC ל‑3.4% ב‑RL-MPC, ובהתייצבות אף הגיעה לכ‑2–3% בקירוב. זרמים נקיים יותר משמעותם פחות חימום, פעולה שקטה יותר ויעילות כוללת גבוהה יותר.
מה זה אומר לכלי שיט תת-מימיים עתידיים
בעבור קהל לא-מומחה, המסר המרכזי הוא שהוספת שכבת למידה מעל בקרה חזויה הופכת מנועי צוללות לחכמים וחסינים יותר. במקום להסתמך רק על משוואות קבועות שעשויות להיכשל כאשר הים סוער או שהכלי מבצע תנודות חדות, מסגרת ה-RL-MPC יכולה להסתגל בזמן אמת, לשמור על סנכרון, תגובתיות ויעילות של מנוע דו-רוטורי. אף על פי שהתוצאות עד כה מבוססות על סימולציה וידרשו אימות בחומרה אמיתית ובאוקיינוסים האמיתיים, עבודה זו מצביעה על כלי שיט תת-מימיים עתידיים שיסעו רחוק יותר עם אותה אנרגיה, יפיקו פחות רעש ויהיו יציבים וניתנים לשליטה בתנאים מאתגרים.
ציטוט: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
מילות מפתח: הנעת צוללות, מנוע נגד-סיבובי, בקרת למידה חיזוקית, בקרת חזויה מודלית, כלי שיט תת-מימיים