Clear Sky Science · he
אלגוריתם משותף לאמוד מרחק–זווית–מהירות לרדאר FDA‑MIMO מבוסס עיבוד אותות על גבי גרפים
רדאר חכם לעולם צפוף ורועש
ממכוניות אוטונומיות ועד מעקב אווירי, החברה המודרנית נשענת במהות על מערכות רדאר שיכולות לאתר ולעקוב אחרי עצמים במהירות ובאמינות. ככל שהשמים, הכבישים וגלי הרדיו נעשים צפופים יותר, הרדאר צריך להבחין במספר מטרות נעות בנוכחות הפרעות ורעש חזקים. מאמר זה מציג שיטה חדשה שמאפשרת לסוג עוצמתי של רדארים — הידועים כ‑FDA‑MIMO — לראות בצורה ברורה יותר בשלושה ממדים (מרחק, כיוון ומהירות) על ידי שאיבת כלים מתחום מה שעולה לכותרות: עיבוד אותות על גרפים.
מדוע הארכיטקטורה החדשה חשובה
רדארים מסורתיים עם מערך מחומש (phased‑array) מכוונים את קרן השידור בעיקר על ציר הזווית, בדומה להזזת פנס שמאלה וימינה. מערך משתנה בתדר (Frequency Diverse Array, FDA) פועל אחרת: כל אנטנה משדרת בתדר מעט שונה. הסטייה הקטנה הזו עושה את דגם הקרן תלוי לא רק בזווית אלא גם במרחק ובזמן. בשילוב עם טכניקות MIMO (רב‑כניסה רב‑יציאה), רדארי FDA‑MIMO יכולים, עקרונית, לדעת היכן מטרה נמצאת בשלושה ממדים: מרחקה, מיקומה הזוויתי ומהירותה. האתגר הוא לחלץ את כל המידע הזה במהירות ובדייקנות מהתהודות הגולמיות, בייחוד כאשר יש מטרות רבות והאותות שקועים ברעש.
שינוי פרספקטיבה: הפיכת תהודות הרדאר לבעיה ברשת
המחברים מתמודדים עם האתגר על‑ידי דמיון מחדש של המדידות כאותות החיים על גרף — רשת של צמתים וקישורים. כל צומת בגרף מייצג זוג שידור‑קליטה מסוים במערך ה‑FDA‑MIMO, והקישורים מתארים כיצד האותות בצמתים סמוכים קשורים בחלל. בהגדרה מוקפדת של הקשרים הללו בונים מטריצת סמיכויות (adjacency matrix) שמתארת כיצד התהודות אמורות להתפשט ברחבי המערך אם מטרה נמצאת במרחק ובזווית נתונים. כאשר זוג המרחק–הזווית המניח תואם את המטרה האמיתית, דפוס התהודה המדוד מסתדר כמעט בצורה מושלמת עם אחד ממצבי הרטט הטבעיים של הגרף. במילים מעשיות, לאחר גרסה מבוססת‑גרף של המרה פורייה, האנרגיה מתרכזת לשיא חד ברכיב ספקטרלי אחד. האלגוריתם מחפש שיאים כאלה על פני רשת של ערכי מרחק וזווית כדי למצוא היכן המטרות נמצאות. 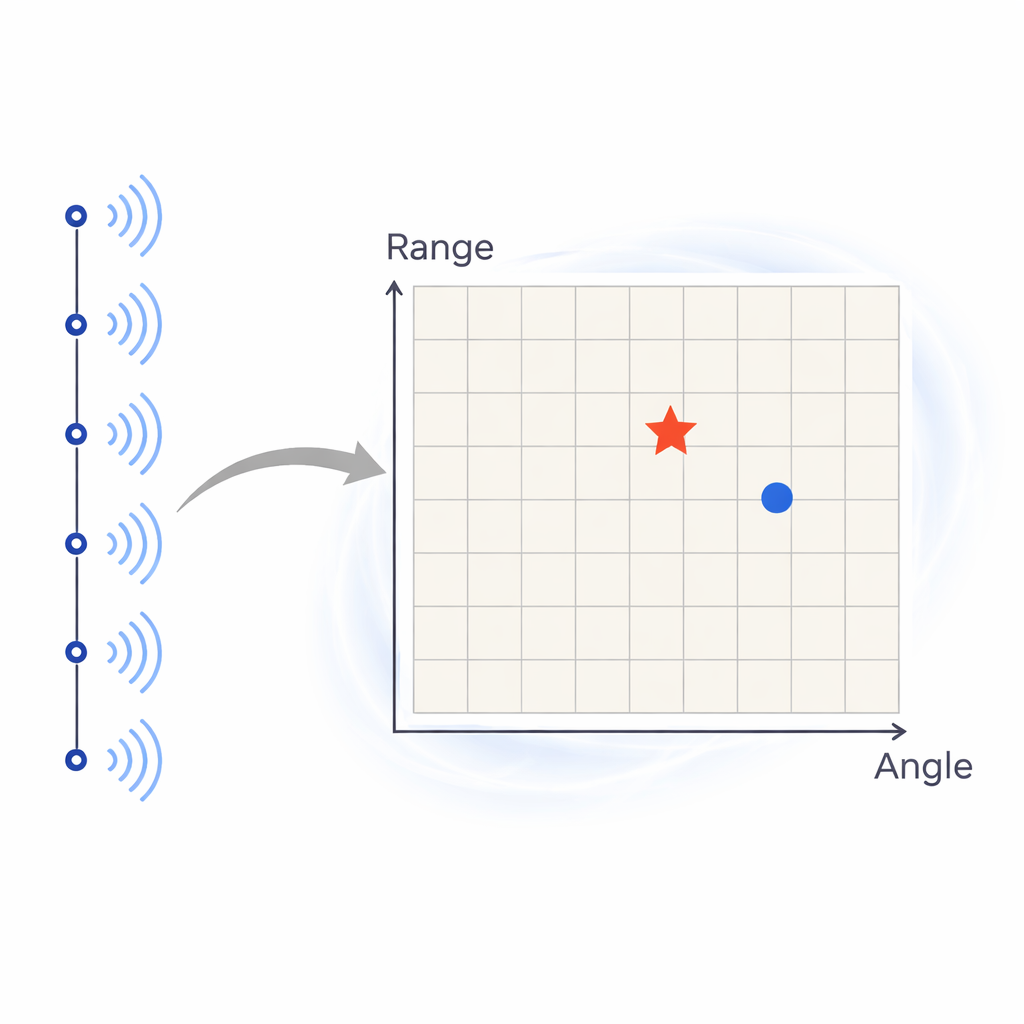
הוספת תנועה: מדידת מהירות באותה שיטה
לאמידת מהירות מטרות מרחיבים את רעיון הגרף לממד הזמן, על פני מספר פולסים של הרדאר. כעת כל צומת מייצג פולס בזמן, והקישורים מחברים פולסים סמוכים בלולאה כדי ללכוד כיצד האות אמור להשתנות אם למטרה יש מהירות רדיאלית נתונה. שוב, כאשר המהירות המניחה תואמת את המהירות האמיתית, האות המומר מציג שיא מרוכז בתחום הספקטרלי של הגרף. האלגוריתם סורק מהירויות מועמדות ומחפש היכן השיא חזק ביותר. חשוב לציין שהמחברים מעצבים את המסגרת כך שאמדני מרחק–זווית מהגרף המרחבי ואמדני מהירות מהגרף הזמני יחזקו זה את זה. הנתונים מכל האנטנות וכל הפולסים משולבים ליצירת מבנה רב־ממדי שמשפר דיוק בלי להכפיל עבודה. 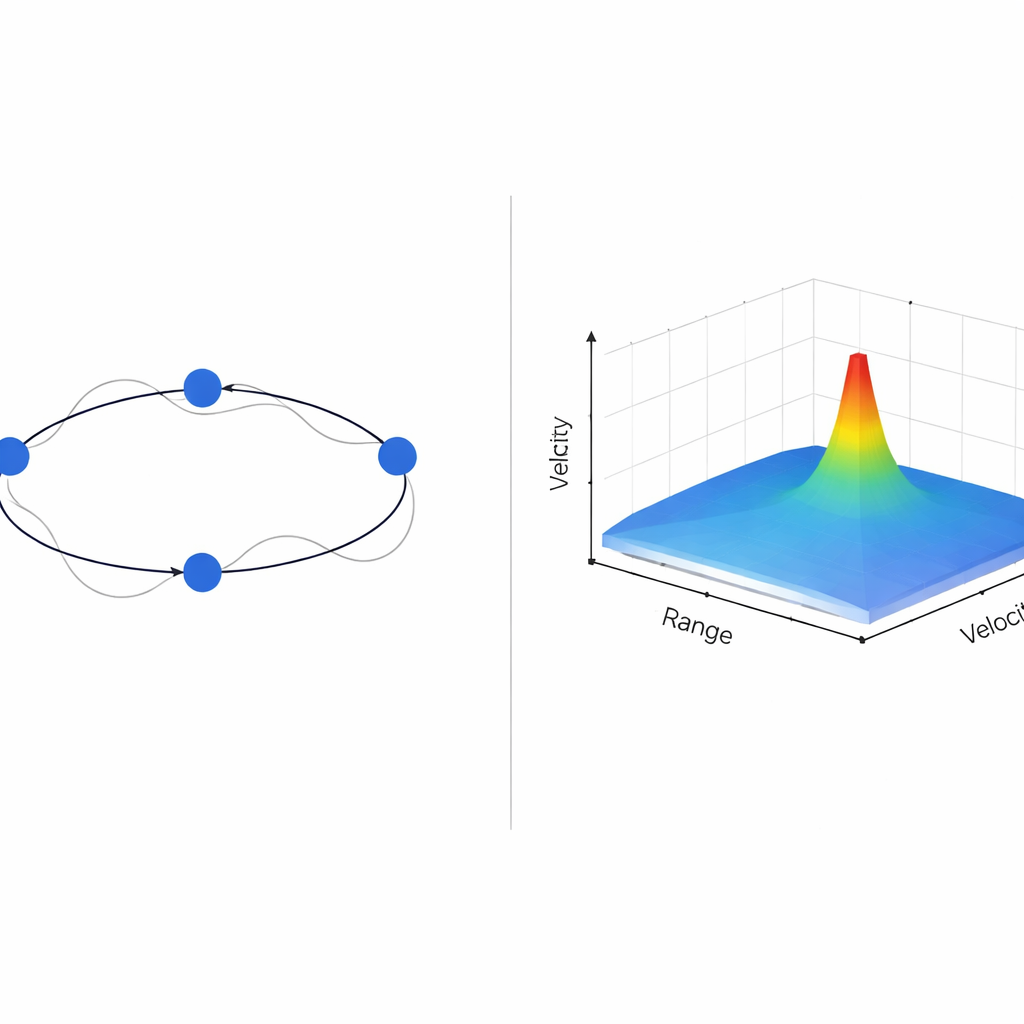
בדיקת השיטה
באמצעות סדרת סימולציות משווים החוקרים את הגישה המבוססת‑גרף לטכניקה שידועה בדיוק גבוה בשם MUSIC. הם בוחנים תרחישים עם מטרה יחידה ורבות, בוחנים עד כמה כל שיטה מפרידה עצמים סמוכים, ומתבוננים בביצועים כאשר האותות חלשים מאוד ביחס לרעש. האלגוריתם המבוסס‑גרף משיג עומס חישובי כולל דומה לשיטות הקלאסיות, אך מציע רזולוציה חדה יותר במרחק, בזווית ובמהירות. הוא יעיל במיוחד בדיכוי שיאי שווא הנובעים מרעש, מה שמוביל למפות מטרות נקיות ומהימנות יותר. גם כאשר מקדם האות‑לרעש ירוד — תנאים שבהם שיטות מסורתיות רבות מתקשות — האלגוריתם החדש שומר על גבולות שגיאה הדוקים לגבי מיקומן של המטרות ומהירותן.
מה משמעות הדבר לרדאר בעולם האמיתי
בהסבר פשוט, עבודה זו מראה כי התייחסות לנתוני רדאר כאילו הם חיים על רשת מאפשרת עיבוד חכם שמפריד בצורה נקייה יותר בין מטרות אמיתיות לבין הפרעות. עבור יישומים המיישבים בין הגנה וסחר אווירי לבין בטיחות רכב וחישה סביבתית, הטכניקה המוצעת מבטיחה מעקב מדויק יותר אחרי מספר עצמים נעים בתנאים קשים, ללא צורך בכמויות חישוב בלתי מציאותיות. על ידי מיזוג עיצוב אנטנות מתקדם עם מתמטיקה מבוססת‑גרף, המחברים מדגימים דרך מעשית לקראת רדארים שרואים רחוק יותר, חדה יותר ומהימנה יותר בסביבה אלקטרומגנטית הולכת ומסובכת.
ציטוט: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
מילות מפתח: חישה ברדאר, מעקב מטרות, עיבוד אותות, עיבוד אותות על גרפים, FDA‑MIMO