Clear Sky Science · he
ניווט עצמאי בסביבות חיצוניות לא-מובנות באמצעות למידת חיזוק מונחית סגמנטציה סמנטית
רובוטים שלומדים לטייל ביער
דמיינו רובוט קטן שיכול לטייל בשביל יער בעצמו, לנטות בין עצים וסלעים בלי GPS או אדם שמחזיק ג'ויסטיק. מאמר זה מתאר מערכת שמלמדת רובוטים מסוג זה "לראות" שבילים ביערות צפופים ולקבל, רגע אחרי רגע, החלטות איך להתקדם בבטחה. העבודה רלוונטית לרובוטים עתידיים שעשויים לסייע במעקב יערות, מניעת שריפות, חילוץ והצלה ואפילו משלוחים חיצוניים במקומות שבהם אותות לוויין חלשים או חסרים.
מדוע היערות קשים כל כך עבור רובוטים
יערות הם בין המקומות הקשים ביותר עבור מכונות אוטונומיות. שבילים יכולים להיות צרים ומתפתלים, הקרקע לא אחידה, ענפים ושיחים לעתים חוסמים את הראות, ועצים גבוהים עושים את אותות ה-GPS בלתי מהימנים. שיטות ניווט מסורתיות תלויות במפות מדויקות, ב-GPS חזק או בחיישני לייזר יקרים, ובדרך כלל מניחות מרחבים ברורים ומובנים כמו רחובות עירוניים או רצפות מפעל. ביער ההנחות האלו קרסות: צללים, עונות משתנות וצמחייה סבוכה מבלבלים מערכות ראייה פשוטות, ומבקרים מבוססי-חוקים מתקשים להתמודד עם כל המצבים המבולגנים והבלתי צפויים שנוצרים על שביל אמיתי.
שלושה "מוחות" שעובדים יחד
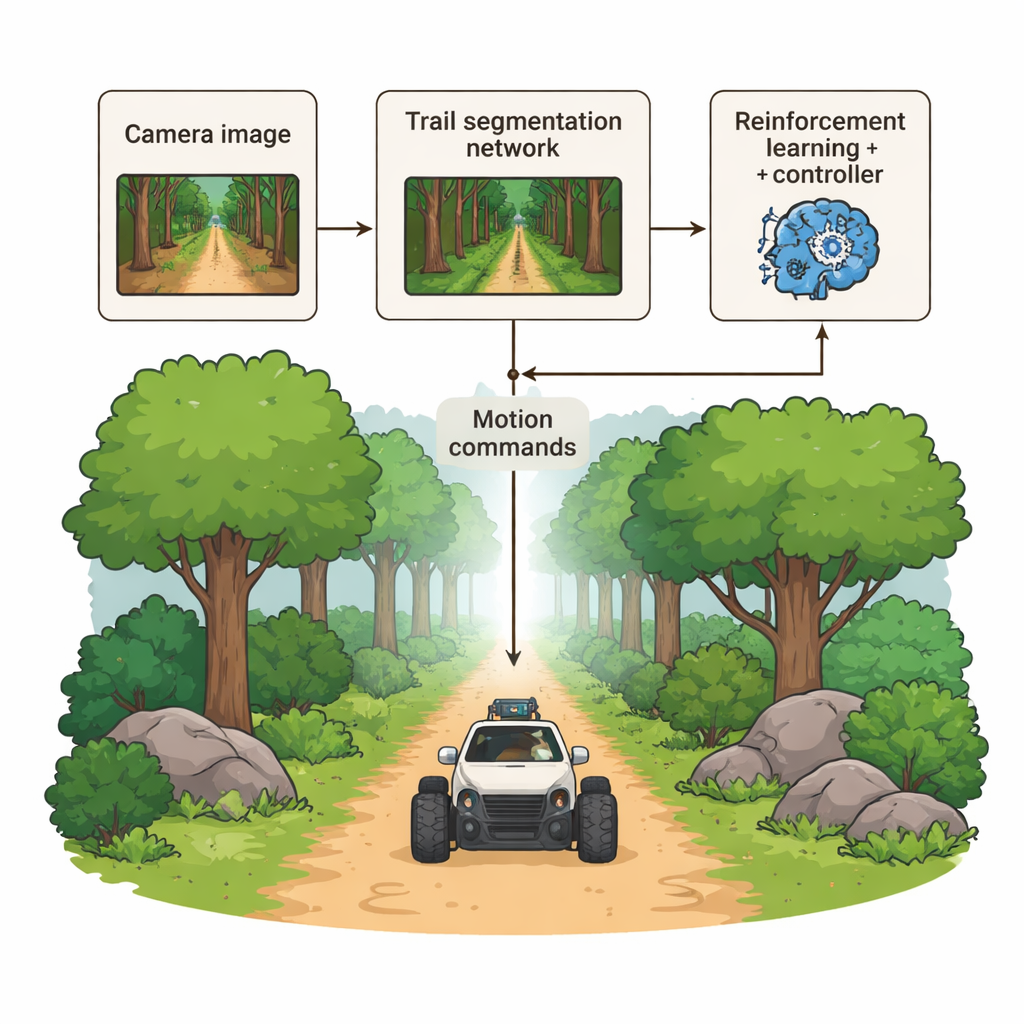
המחברים מציעים מערכת ניווט היברידית שמעניקה לרובוטים שלושה "מוחות" משלימים. ראשית, מודול ראייה עמוק בוחן כל תמונת מצלמה ומסמן, כמעט פיקסל אחרי פיקסל, אילו חלקים שייכים לשביל הניתן לליכה. שנית, מודול קבלת החלטות מבוסס-למידה משתמש בלמידת חיזוק כדי לבחור פקודות הגה ומהירות חלקות, ומתגמל התנהגות שמחזיקה על השביל, נמנעת מהתנגשויות ומגיעה ליעד ביעילות. שלישית, מבקר קלאסי ממיר את צורת השביל החזויה לתנועות גלגל יציבות, שמחליקות תנועות פתאומיות ושומרות על נתיב הרובוט חלק ולא זיגזגי. במקום רשת אחת שחוסמת את כל השכבות מקצה לקצה, המודולים נפרדים אך קשורים בכיליון, מה שמאפשר למהנדסים להבין ולבצע איתור שגיאות בכל שלב.
להדריך את הראייה לזהות שבילים
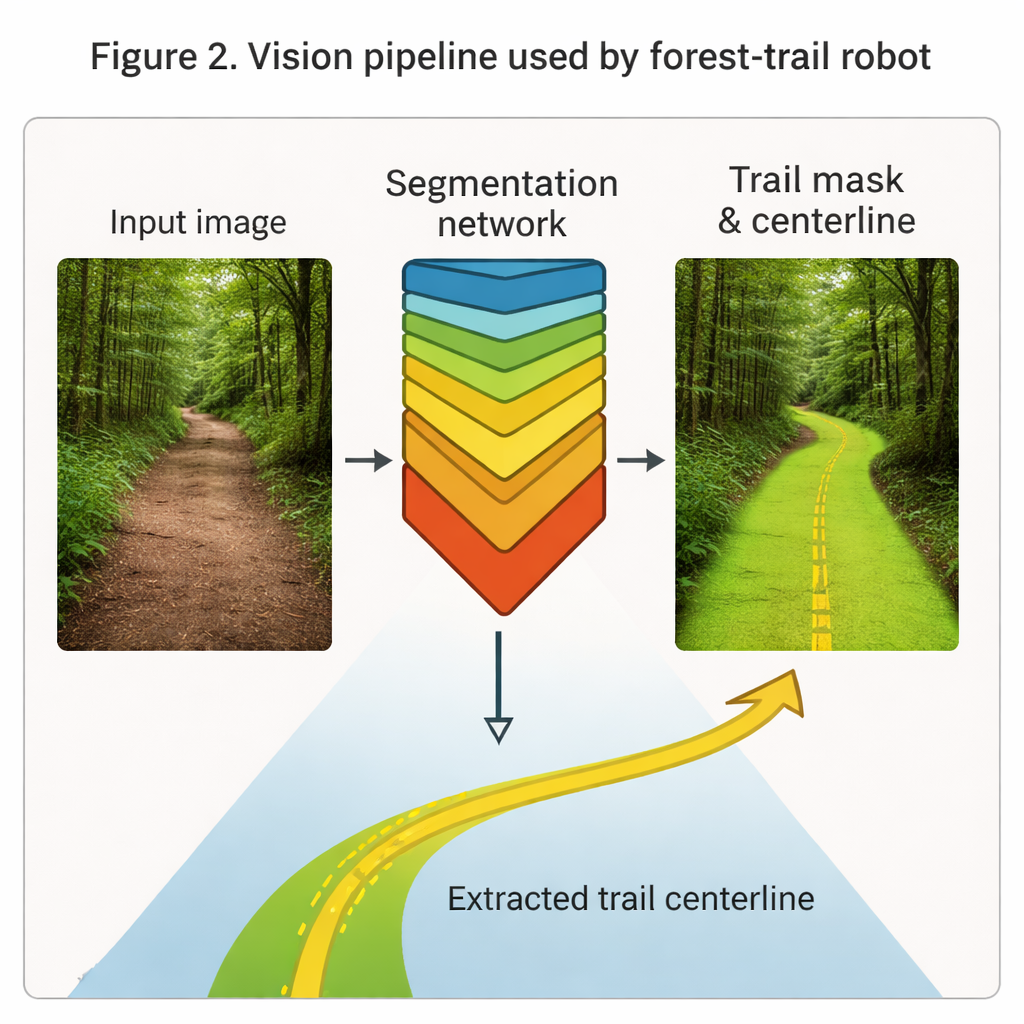
בלב "העיניים" של הרובוט עומדת רשת עמוקה הידועה כ-Mask R-CNN, כאן מכויילת להדגיש שבילי יער בתמונות צבע רגילות. מאומנת על כ-24,000 פריימים מתויגים מצילומי טיול אמיתיים בגובה אדם, בתנאי תאורה, מזג אוויר וסוגי שבילים שונים, המערכת לומדת לצבוע את אזור השביל בכל פריים כמסקה נקייה. מהמסקה הזו היא מפיקה קו מרכז דק שמייצג את כיוון ועיקול השביל שלפנים. במבחנים, מודול הראייה משיג חפיפה גבוהה עם תיוגים שמצוירים על-ידי בני אדם ודיוק פיקסלים מעל 90%, ומסמן את השבילים בעקביות גם כשענפים או צללים מסתירים חלק מהדרך. רמזים גיאומטריים אלה מוזנים ישירות למודולי הלמידה והבקרה כתיאור קומפקטי של "איפה השביל נמצא."
לאמן רובוט לקבל החלטות טובות
המרכיב המרכזי השני הוא מודול ההחלטה, שמשתמש בטכניקה שנקראת למידת חיזוק. במקום שיגידו לו בדיוק מה לעשות, הרובוט מנסה פעולות בסימולציה מציאותית של יער ומקבל פרסים על תוצאות טובות ועונשים על רעות. התקדמות לאורך השביל היא טובה; סטייה מהשביל, התנגשות במכשולים או תקיעה הן רעות. במשך כ-150,000 צעדי אימון המערכת מגלת בהדרגה אסטרטגיות שמחזיקות אותה ממורכזת על השביל, מתמודדת בעיקולים בחן ומגיבה בחוכמה כשענפים או סלעים מופיעים בדרכו. כדי לשמור על תנועות חלקות ובטוחות, ניתן למזג את הפעולות שנלמדו עם אלו של הבקר הקלאסי, מה שעוזר במיוחד בעיקולים חדים או בתנאים רועשים.
להעמיד את המערכת במבחן
כדי לשפוט עד כמה השילוב הזה עובד, החוקרים בנו שלושה יערות וירטואליים מפורטים: אחד עם שבילים צרים ומלאי אשפה, אחר עם משטח תלול ולא אחיד ומכשולים גדולים, ושלישי מלא בצמתים, סתירות ושבילים מזויפים שמסיחים את הדעת. ב-90 ניסיונות במפות אלו, הרובוט הגיע ליעד ללא התנגשות בכ-87% מהמקרים, עם ממוצע של רק 0.2 זעזועים לכל ריצה ובדרך כלל נשאר בממוצע כ-30 סנטימטרים ממרכז השביל. הוא גם השלים מסלולים במהירות ובאחידות. כאשר המחברים הסירו או הפשטו מודול אחד בכל פעם, הביצועים צנחו משמעותית—מה שמראה שכל שלושת הרכיבים נחוצים. בהשוואה למערכות עדכניות אחרות, כולל כאלה המשתמשות בסורקי לייזר, גישה היברידית המבוססת רק על ראייה סיפקה את השילוב הטוב ביותר של שיעור הצלחה, דיוק ובטיחות.
מה משמעות הדבר לרובוטים בשטח
ללא-מומחה, המסקנה היא שהרובוטים משתפרים ביכולת לטייל כמו משתמשי שבילים זהירים ומיומנים. על-ידי שילוב תחושה חזקה של הקשר חזותי ("זה השביל"), קבלת החלטות מבוססת-ניסיון ("המהלכים האלו עבדו טוב בעבר") ומנגנון הגה יציב, המערכת המוצעת מאפשרת לרובוט גלגלי קטן לנווט ביערות מורכבים ללא מפות או GPS. אף שהעבודה נבדקה בסימולציה ועדיין עומדת בפני אתגרים כמו תאורה קיצונית וסוגי שבילים נדירים, היא מציעה תבנית מעשית לרובוטים שיידעו לחלוק סביבה פראית עם אנשים בבטחה, לסייע בבדיקת יערות, לתמוך בצוותי חילוץ ולנהל משאבים טבעיים ביעילות רבה יותר.
ציטוט: Tibermacine, A., Tibermacine, I.E., Akrour, D. et al. Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning. Sci Rep 16, 2633 (2026). https://doi.org/10.1038/s41598-026-36022-2
מילות מפתח: ניווט עצמאי, רובוטיקה יערית, ראייה ממוחשבת, למידת חיזוק, סגמנטציה סמנטית