Clear Sky Science · he
השפעת פרמטרים מבניים על מרחב העבודה של רובוטים מקביליים מדלית ואופטימיזציה של התאמת מסלולים ליישומי מיון עלי תה טריים
רובוטים נכנסים למפעל התה
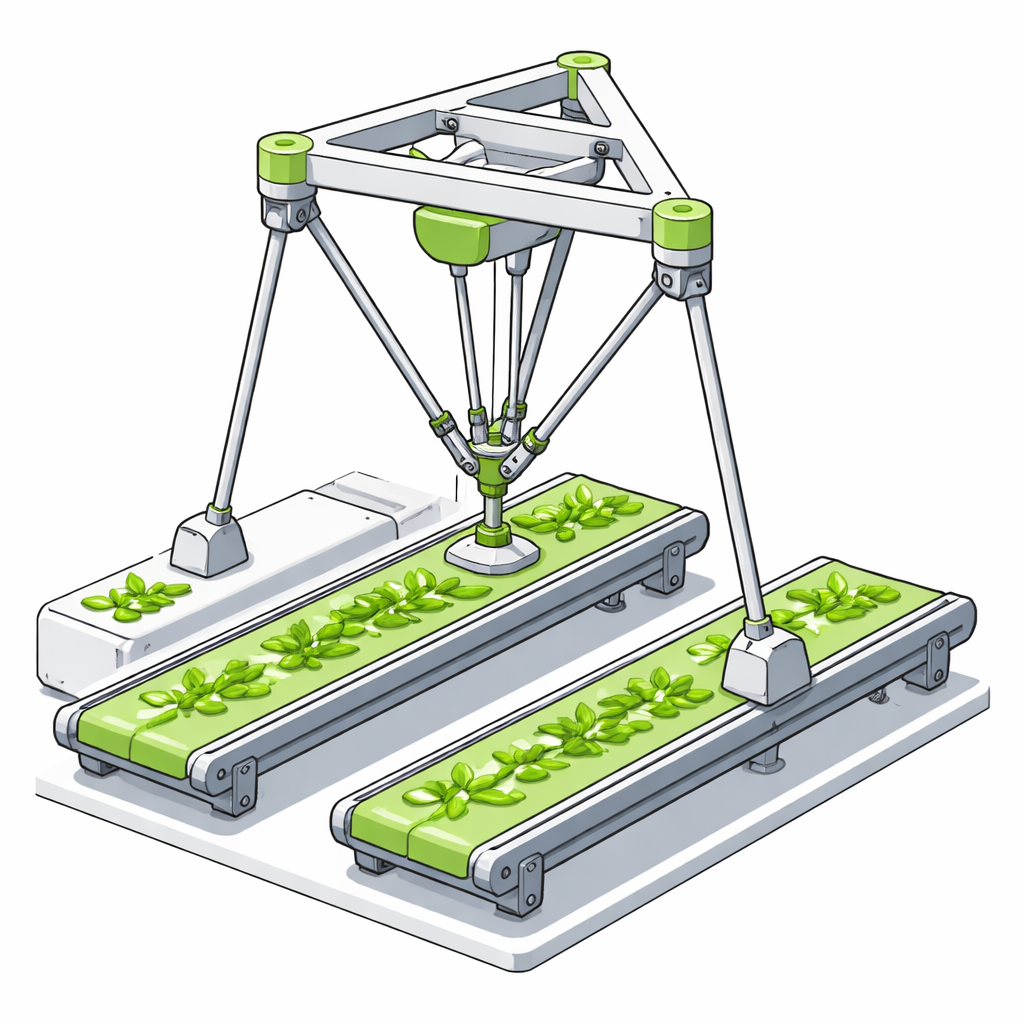
עלי תה טריים עדינים: מעיכה של ניצן או חבלה בעלה פוגעת באיכות המשקה הסופי. עם זאת, מיון הידני של העלים הוא עבודת יד מייגעת ואיטית. מאמר זה בוחן כיצד ניתן לכוונן רובוט תעשייתי מהיר וקל — הנקרא רובוט דלתא — כך שזז במהירות ובדייקנות מעל מסועי התה תוך טיפול בעלים בעדינות ובאמינות.
למה עלי תה זקוקים לטיפול מיוחד
בעיבוד תה מודרני, מיון עלים טריים הוא חיוני לאיכות ולמחיר. עובדים אנושיים מתקשים לשמור על קצב ועקביות, במיוחד במשמרות ארוכות. רובוטי דלתא, שנמצאים בשימוש נרחב לאריזות מהירות, נראים כפתרון טבעי: הם נוקשים, מדויקים ויכולים לנוע במהירויות מרשימות. עם זאת, רוב העיצובים הקודמים תואמו לאובייקטים גנריים כגון ארגזים או אגוזים, לא לניצנים עדינים הממוקמים באזור צר בין שני מסועים. "מרחב העבודה" של הרובוט — האזור התלת־ממדי שהוא יכול להגיע אליו — חייב להתאים לאזור הצר הזה ולבצע תנועה בעלת צורה של שער: אחיזה, הרמה, מעבר והנחה, הכל מבלי להיתקל בעצמו או לפספס את היעד.
כיצד צורת הרובוט שולטת במה שהוא יכול להגיע אליו
המחברים מתחילים בבניית תיאור מתמטי מפורט של תנועת רובוט הדלתא. הם מקשרים את הזוויות של שלוש מפרקי ההנעה למיקום המדויק של הפלטפורמה הנעה הקטנה שנושאת מצמד יניקה. באמצעות חישובים קדמיים (זוויות למיקום) והפוכים (מיקום לזוויות) הם מגדירים כל נקודה שהמניע הסופי יכול להגיע אליה כאשר זוויות המפרקים מוגבלות לטווח בטוח. עם משוואות אלה מקודדות ב‑MATLAB הם מדמים את הנפח המושג המלא של הרובוט ומציגים אותו ממספר נקודות מבט כענן נקודות צבעוני בצורת קערה. מרחב עבודה זה משמש לאחר מכן בסיס לשיפוט האם עיצוב מכני מסוים יכול להתמודד עם מסלול מיון התה.
בדיקת עיצובים רבים בניסויים וירטואליים
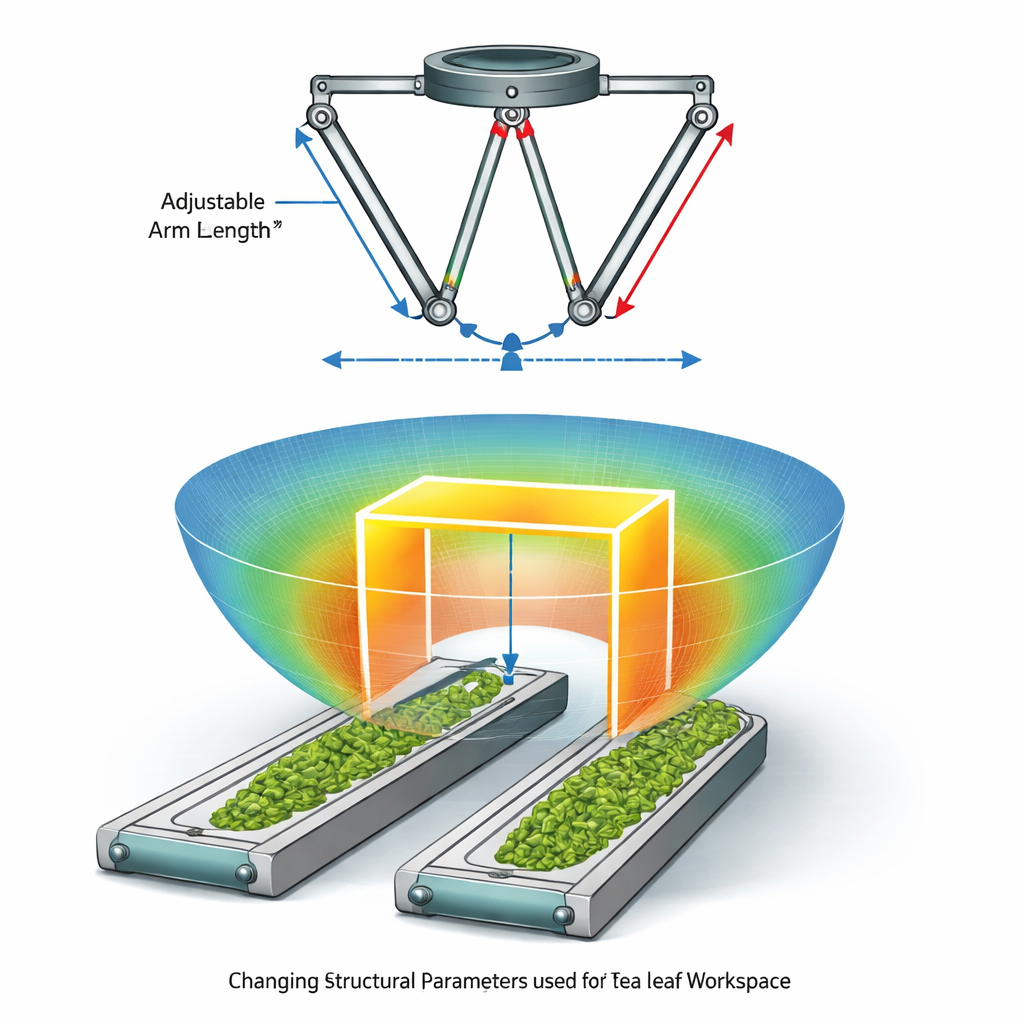
במקום לבנות מספר אבי‑טיפוס פיזיים, הצוות מטפל בארבע בחירות גיאומטריות מרכזיות ככפתורי עיצוב: אורך הזרועות העליונות (L), אורך הזרועות התחתונות (l), רדיוס משולש הבסיס הקבוע (R) ורדיוס משולש התנועה (r). הם משתמשים בפריסת ניסוי אורטוגונלית, שמדגמנת ביעילות שילובים של ארבעת הפרמטרים הללו בשלושה רמות כל אחד, ויוצרת תשעה רובוטים וירטואליים. עבור כל אחד, התוכנית מחשבת את נפח מרחב העבודה הכולל ומראה כיצד הוא חופף לתיבת מסלול סטנדרטית בצורת שער בגובה 200 מ"מ, רוחב 400 מ"מ ועומק 200 מ"מ. זה מאפשר לחוקרים לראות לא רק עד כמה כל מרחב עבודה גדול, אלא גם האם הוא מכסה בפועל את האזור שבו נעים עלי התה על המסועים.
מה המימדים שהכי משפיעים
על ידי השוואת תשעת העיצובים המדומים, המחקר מדרג עד כמה כל בחירה מבנית משפיעה על הטווח השימושי. המנצח הברור הוא אורך הזרוע התחתונה (הפסיבית): זרועות תחתונות ארוכות מרחיבות משמעותית את מרחב העבודה. במקום השני בחשיבות נמצא אורך הזרוע העליונה (הפעילה), שגם הוא מרחיב את טווח התנועה אבל עלול לגרום לרעידות אם יוארך יתר על המידה. לרדיוס הבסיס יש השפעה מתונה; אם הבסיס רחב מדי, הזרועות הנעות מתנגשות בקלות עם המסגרת וכך נפח השימוש הממשי מצטמצם. לרדיוס הפלטפורמה הנעה השפעה החלשה ביותר, אך פלטפורמה קטנה יותר מסייעת מעט על ידי שחרור מקום לתנועת הזרועות. ניתוחי טווח ושונות מראים שבעוד שקבוצות פרמטרים מסוימות מספקות את נפח העבודה הכולל הגדול ביותר, הן לא בהכרח מכסות את אזור השער הצר החשוב למיון תה.
עיצוב שהולם את קו התה
התצורה הפרקטית ביותר אינה זו בעלת הנפח הגדול ביותר בסך הכל, אלא זו שמרחב העבודה שלה עוטף בדיוק את המסלול בצורת השער. שילוב מסוים — זרועות עליונות 250 מ"מ, זרועות תחתונות 400 מ"מ, רדיוס בסיס 90 מ"מ ורדיוס פלטפורמה נעה 50 מ"מ — מכסה במלואו את המסלול הנדרש בין שני המסועים תוך שמירה על קומפקטיות ויציבות הרובוט. בגובה תפעולי סביב 325 מ"מ מעל מישור ההתייחסות, הרובוט משיג את המרחב השימושי הרחב ביותר שלו, יותר ממספיק לגישור בין שני המסועים ולהשלמת מחזור אחיזה–הרמה–העברה–הנחה מבלי לצאת מהאזור הבטוח.
מה זה אומר עבור מפעלי תה עתידיים
בעבור קוראים לא‑מומחים, המסר המרכזי הוא ששינויים קטנים באורכי איברי הרובוט ובגדלי הפלטפורמה יכולים לעשות את ההבדל בין מכונה שנעה מרשימת בחלל פתוח לבין מכונה שעובדת באופן אמין על קו ייצור אמיתי. על ידי כימות כיצד כל פרמטר מבני מעצב את נפח ההישג וחופפו עם מסלול מציאותי בצורת שער, המחקר מציע נוסחה לעיצוב רובוטי דלתא שמיון עלי תה במהירות, בדיוק ובנזק מינימלי. אותו גישה יכולה להנחות עיצובים מותאמים לרובוטים המיועדים למזונות או למוצרים עדינים אחרים, בכל מקום שבו יש לספק יחדיו מהירות, דיוק וטיפול עדין.
ציטוט: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
מילות מפתח: רובוט דלתא, מיון עלי תה, מרחב עבודה של רובוט, אחיזה והנחה, אוטומציה תעשייתית