Clear Sky Science · he
פיתוח והערכת מערכת מיקום מטופל מונחית-משטח לטיפול בלכידת נייטרונים בבורון
יישום חיצי חדה יותר לנייטרונים הלוחמים בסרטן
טיפול בכידוד נייטרונים בבורון (BNCT) הוא טיפול מבטיח בסרטן היכול לפגוע בתאי הגידול באופן סלקטיבי תוך שמירה על חלק ניכר מרקמות הבריאות הסמוכות. אך כדי שהדיוק הזה יניב תועלת, הרופאים חייבים למקם את המטופל בדיוק במיקום הנכון מול קרן נייטרונים קבועה—לעיתים בתוך מילימטר. מאמר זה מתאר מערכת חדשה למיקום מנוהלת באמצעות מצלמות ורובוט, שנועדה להפוך את ההכנה העדינה למהירה ומדויקת יותר ופחות תלויה בידו ובשיקול דעתו של הטכנאי.
למה המיקום חשוב כל כך
בניגוד למכונות הקרינה המודרניות היכולות לנוע סביב המטופל ולעצב את קרני ה-X שלהן, BNCT נשען על מקור נייטרונים כבד וקבוע עם אפשרויות מצומצמות לכוונון הקרן. המטופל, ולא הקרן, צריך לעבור למקום המדויק. באופן מסורתי, הצוות משתמש בלייזרים, סימוני עור ושינויים ידניים במיטה כדי להשיג זאת. התהליך איטי, תלוי במידה רבה במיומנות המפעיל, ויכול להשאיר שגיאות מיקום קטנות המשפיעות על מינון הקרינה שהגידול—והאיברים הסמוכים—מקבלים בפועל. ככל שמרכזי BNCT נפתחים לטיפול בגידולים מורכבים בראש, בצוואר ובאזורים שקשה להגיע אליהם, המגבלות הללו הופכות למכשול משמעותי.
עוזר הייטק: מצלמות, תוכנה ורובוט
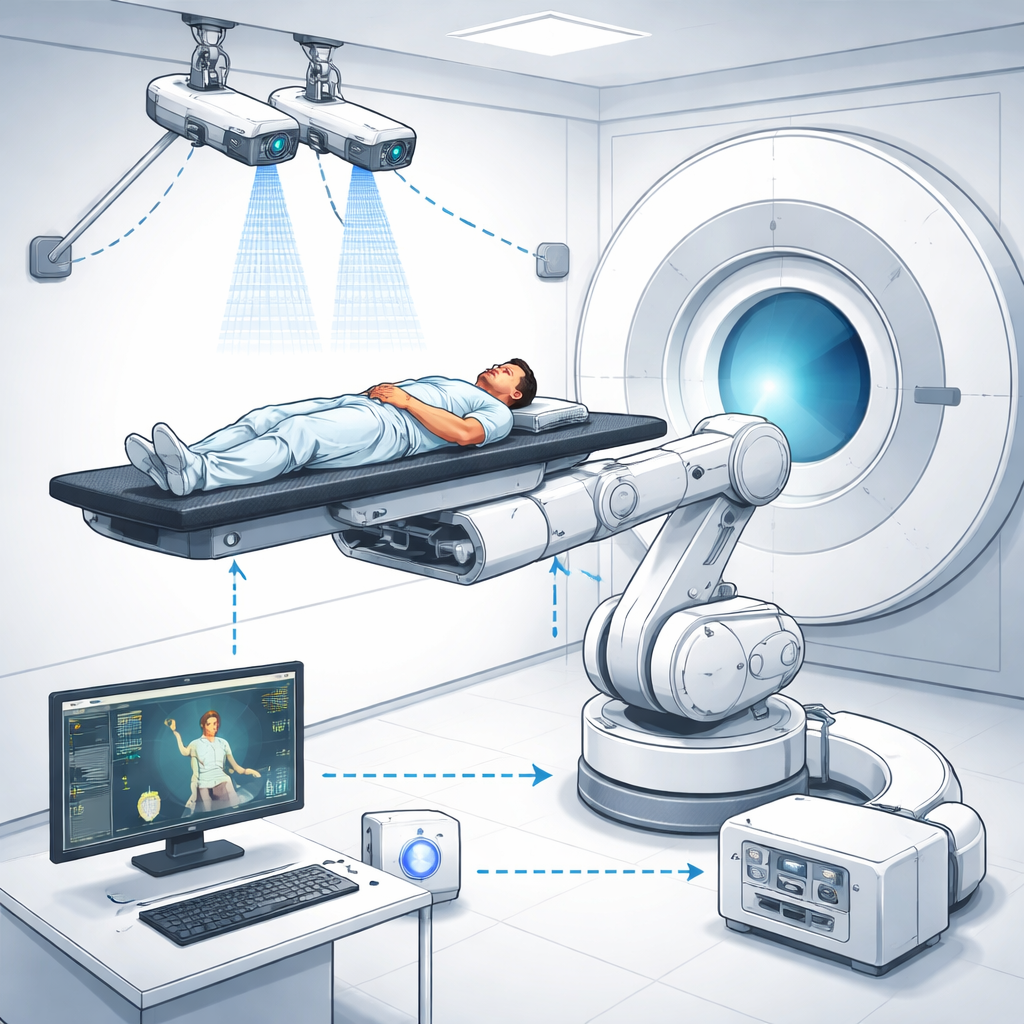
כדי להתמודד עם הבעיה בנו החוקרים מערכת משולבת בשם Surface-Guided BNCT (SG-BNCT) המשלבת שלושה רכיבים עיקריים: תוכנת תכנון טיפול מיוחדת בשם NeuMANTA, זוג מצלמות ראייה סטריאו בינוקולאריות, ורובוט תעשייתי בן שישה צירים הנושא את מיטת הטיפול. ב-NeuMANTA מתכננים הרופאים את הטיפול ב-BNCT על תמונות CT, כולל הנקודה המדויקת שעבורה אמורה לעבור קרן הנייטרונים ושלוש נקודות ייחוס קטנות, או סימני דפנה, על עור המטופל. סימנים אלה מגדירים את מיקום המטופל בתמונות התכנון וקושרים את התכנון לקואורדינטות חדר הטיפול במציאות באמצעות מטריצות טרנספורמציה מתמטיות.
איך מצלמות תלת־ממד רואות ומתאימות את המיקום
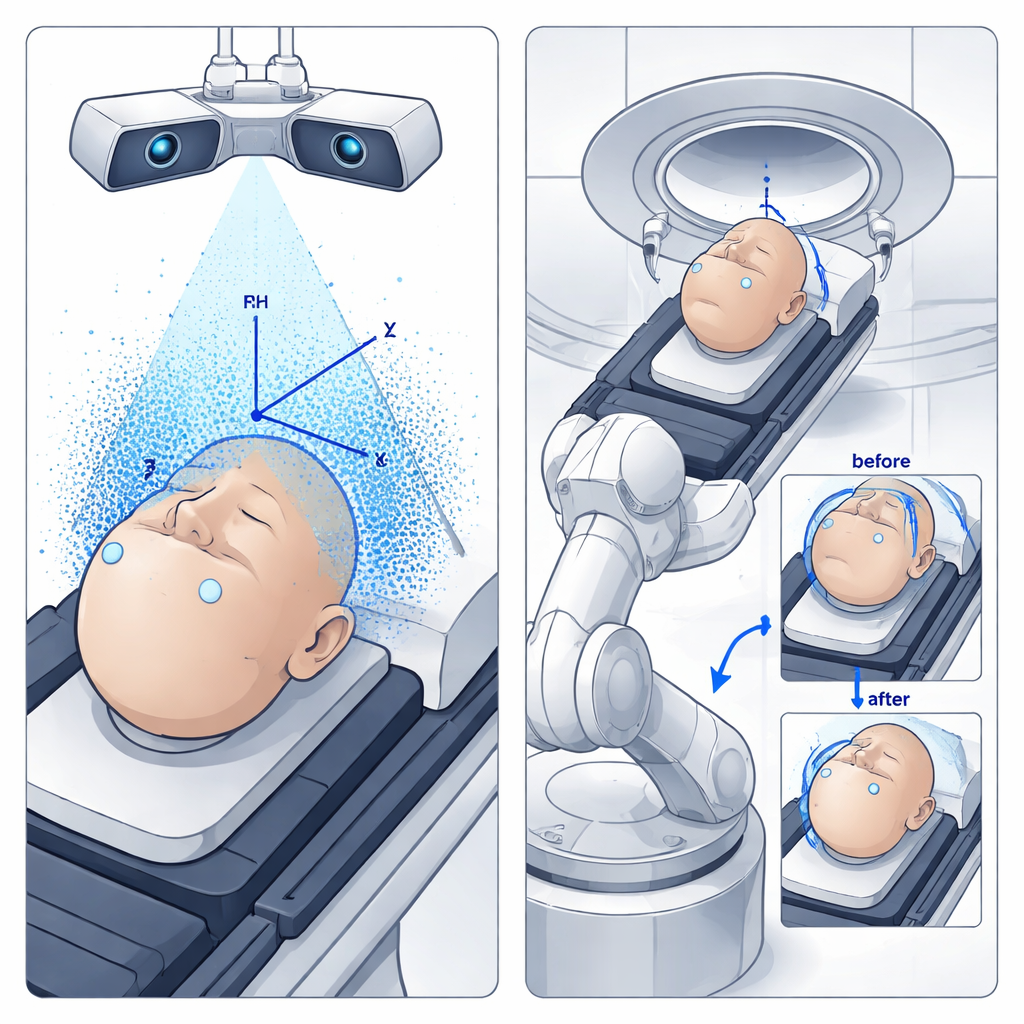
בחדר הטיפול צופות שתי מצלמות ברזולוציה גבוהה במטופל מזוויות שונות, בדומה לעיניים אנושיות. באמצעות אלגוריתם זיהוי עצמים מודרני (YOLO) שאומן על יותר מאלף תמונות, המערכת מוצאת במהירות את אותם סימני דפנה על משטח המטופל. על ידי השוואת המראה של כל סימן בתמונות המצלמה השמאלית והימנית, המחשב משחזר את מיקומם בתלת־ממד ויוצר ענן נקודות מפורט של המשטח. משלוש נקודות שאינן קולינאריות הוא משחזר מערכת קואורדינטות של המטופל ומשווה אותה למערכת הקואורדינטות שהוגדרה בתכנית הטיפול. כל אי-התאמה בין המיקום המתוכנן לבין המיקום בפועל מומרת לפקודות תרגום וסיבוב—שש דרגות חופש בסה"כ—לרובוט התעשייתי התומך במיטת המטופל.
בדיקות עם מטופל תחליפי
לפני השימוש במערכת על מטופלים אמיתיים, בצוות בחנו אותה עם פנתום אנתרופומורפי—דגם בצורת אדם—מצויד בסמנים פנימיים ומשטחיים הנראים גם בסריקות CT וגם בעיני המצלמות. הם יצרו מספר סידורי טיפול ב-NeuMANTA עם כיווני קרן שונים ואז ביקשו מהמערכת SG-BNCT לשחזר את התכנונים האלה על ידי העברת הפנתום אוטומטית למקום. לייזר שהוצב במרכז פתח קרן הנייטרונים שימש תחליף לקרן עצמה, כך שהחוקרים יכלו למדוד ישירות עד כמה הנקודה הסופית על הפנתום סטתה מהיעד המתוכנן, הן לאורך ציר הקרן (מרחק מקור־אל־עור) והן לצדדים במשטח המאונך לקרן.
כמה קרוב המערכת הגיעה?
ב-24 סידורי ניסוי, שגיאות המיקום של המערכת היו בדרך כלל מתחת למילימטר בשתי הכיוונים, כאשר שגיאות בודדות בפעימה אחת הגיעו לכ־2–3 מילימטרים לאורך ציר הקרן. המחברים ייחסו את ההבדלים הנותרים לשלושה גורמים עיקריים: עובי חתכי תמונת ה-CT, חוסר ודאויות כיול קטן במצלמות הסטראו, ושגיאות זיהוי ברמת הפיקסל כאשר התוכנה מזהה את הסימנים. באופן חשוב, המערכת תוכננה לפעול בלולאה סגורה: היא מודדת את מיקומי הסימנים שוב ושוב, מעדכנת את ההתאמה התלת־ממדית ומפקדת על תזוזות עדינות נוספות של הרובוט עד שהשגיאה הנותרת נופלת מתחת לסף שנקבע. בבדיקות החוזרות הללו הסטיות הסופיות ירדו בעקביות לרמה משמעותית מתחת למילימטר, והשיגו התאמה תת־מילימטרית הן בעומק והן בכיוונים הצדדיים.
מה משמעות הדבר עבור מטופלים
עבור מטופלים שעשויים להפיק תועלת מ-BNCT—ובעיקר אלה עם גידולים באזורים מורכבים או רגישים—מערכת המיקום המונחית־משטח והממושכת ברובוט מבטיחה טיפולים אמינים ויעילים יותר. על ידי קישור ישיר של תוכנת תכנון הטיפולים למצלמות שרואות את המטופל בפועל ולרובוט היכול לבצע תנועות מדויקות, השיטה מקטינה תלות בכיוון לייזר ידני ובהשערות אנושיות. בעוד שהגרסה הנוכחית איטית מדי למעקב תנועה בזמן אמת ורק בדיקות סטטיות בוצעו עד כה, התוצאות מראות כי הטכנולוגיה יכולה במרבית המקרים למקם מטופל בדיוק תת־מילימטרי. עם שיפורי מהירות נוספים והגנה רדיואקטיבית לחומרה, גישה זו עלולה להפוך לעמוד תווך פרקטי לטיפולי BNCT בטוחים ועקביים יותר במערכת הקלינית.
ציטוט: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
מילות מפתח: טיפול בכידוד נייטרונים בבורון, מיקום מטופל, ראייה סטריאו, רובוטיקה רפואית, הנחיית משטח