Clear Sky Science · he
מעקב עולמי דינמי למעקב בזמן אמת ברשתות מצלמות מרובות לכלי רכב
מדוע מצלמות תנועה חכמות חשובות
כל מי שנתקע בעומס תנועה או דאג מתאונות דרכים חווה את המגבלות של מערכות התנועה הנוכחיות. ערים מודרניות מתקינות כיום רשתות מצלמות לאורך כבישים וצמתים כדי לנטר את התנועה בזמן אמת. אבל לגרום למצלמות הללו לעבוד ביחד — לעקוב אחרי אותו רכב בצורה חלקה מצלמה לצלמה — קשה מה שנראה. המחקר הזה מציג שיטה חדשה למעקב כלי רכב על פני מערך גדול של מצלמות בו-זמנית, שמבטיחה ניטור מהיר ואמין יותר שעשוי להפוך את הכבישים לבטוחים יותר ואת ניהול התנועה לחד יותר.
הבעיה במעקב תנועה הקיים היום
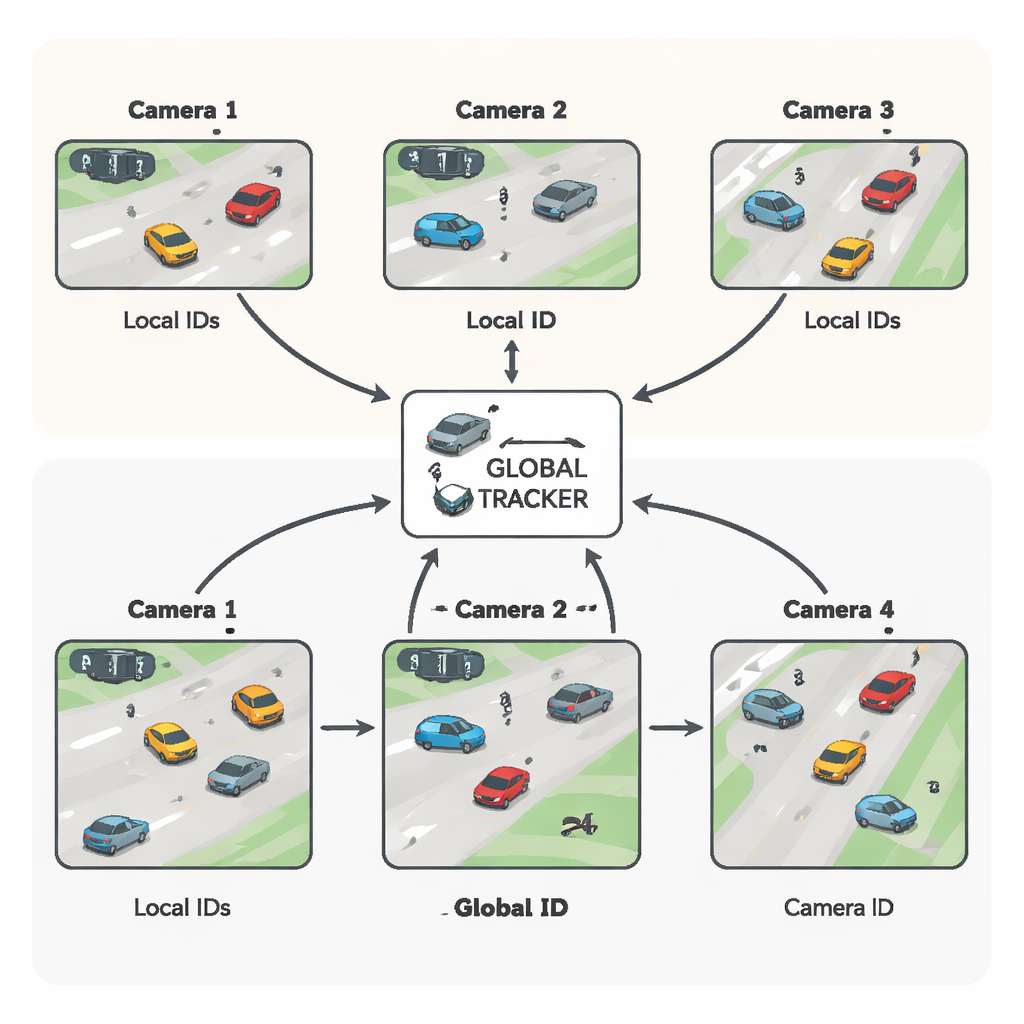
מערכות מסורתיות מתייחסות לכל מצלמה כמעט כעולם קטן ומשלה. ראשית הן מזהות כלי רכב בכל וידאו, ואז בונות מסלולים קצרים לכל רכב בתוך שדה הראייה של מצלמה אחת. רק לאחר צפייה ברצועות ארוכות של וידאו מוקלט מנסות המערכות "לתפור" את המסלולים הללו בין מצלמות באמצעות אשכולות כבדים וכללי יד-אדם לגבי פריסת הכבישים ומיקומי המצלמות. הגישה האפטר-פקטו הזו היא איטית, צורכת משאבי מחשוב רבים, ונאבקת כאשר סצנות התנועה משתנות, מצלמות מועברות או נוספים זוויות חדשות. היא מתקשה גם כשמצלמות מציגות את אותו רכב בגדלים וזוויות שונים, מה שיכול לגרום לאותו רכב להיראות כשני רכבים שונים לגמרי.
דרך חדשה: לעקוב אחרי הכל בזמן אמת
החוקרים מציעים מסגרת חדשה בשם מעקב עולמי דינמי, או DGT, שנבנתה מהיסוד לשימוש בזמן אמת. במקום להמתין עד שכל הווידאו נאסף ואז לנסות לקשר בין מסלולי הרכבים, DGT בונה את הקישורים הללו תוך כדי תנועה. כל מצלמה עדיין מזהה כלי רכב ובונה מסלולים קצרים בתוך המצלמה, אך ברגע שמסלולים אלה מתעדכנים הם מושווים מיד למסלולים ממצלמות אחרות. אלגוריתם התאמה קלאסי משמש להכרעה האם שני מסלולים מזוויות שונות שייכים לאותו רכב. התהליך המקוון והשלב-אחר-שלב הזה מחליף אשכולות ענקיים על כל הנתונים ההיסטוריים, מקטין את העומס החישוב ותורם לעמידה בקצב תנועה חי.
להכיר את אותו רכב מזוויות שונות
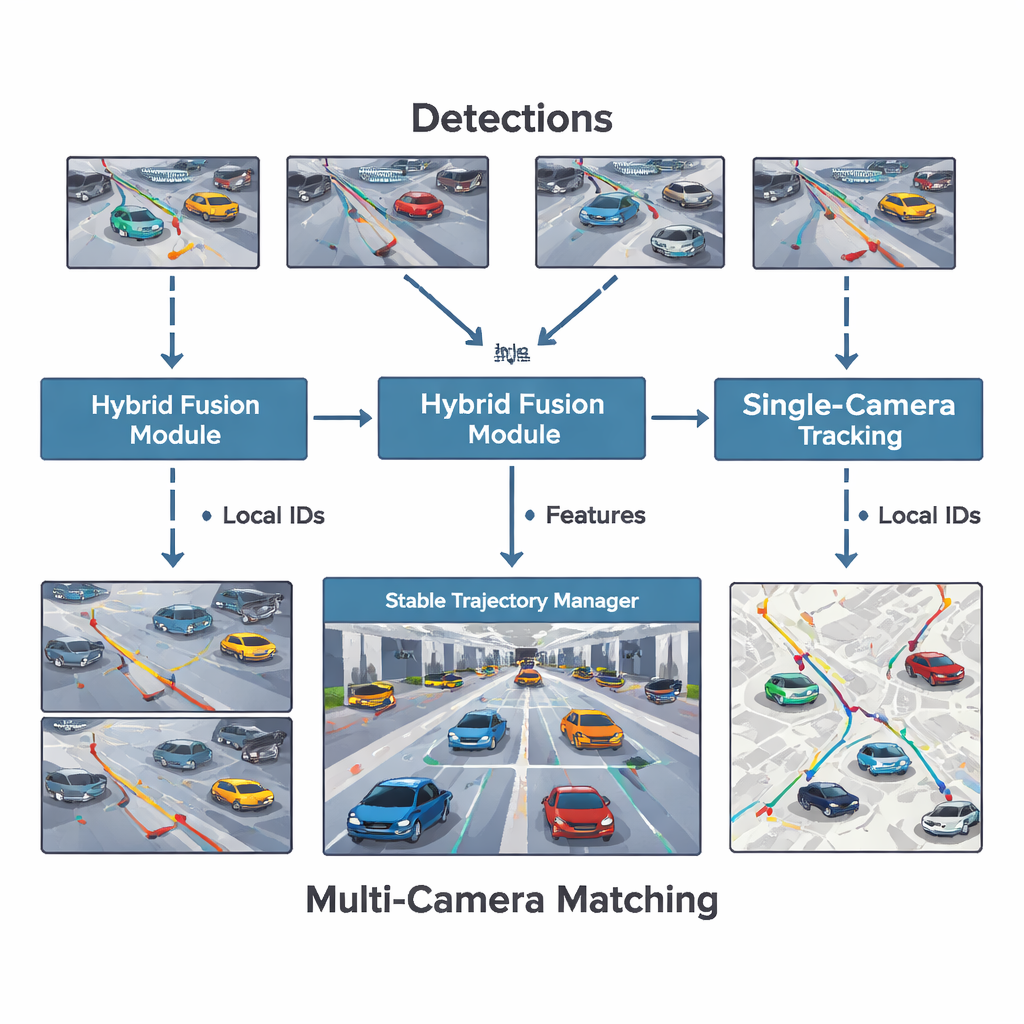
אתגר מרכזי הוא שאותו כלי רכב עשוי להופיע גדול ומפורט במצלמה אחת וקטן ומטושטש באחרת, או מואר בצורה שונה במנהרה לעומת כביש פתוח. כדי להתמודד עם זאת, DGT כולל מודול מיזוג היברידי שממזג פרטים עדינים והקשר רחב מכל תמונה. הוא מעבד את פריימי המצלמה בשתי דרכים במקביל: סניף אחד מתמקד בפרטים חד-פעמיים וקטנים כמו קווי מתאר ומרקמים, בעוד הסניף השני מתמקד בדפוסים והקשרים גלובליים יותר. המערכת מאחדת את שתי התצפיות לתיאור יציב אחד של הופעת הרכב. ניסויים מראים ששיטה זו שומרת על רמת ביטחון גבוהה במערכת, אפילו כאשר הגודל או הבהירות של הרכב משתנים משמעותית בין מצלמות.
שמירה על מסלולים יציבים ואמינים
DGT מציגה גם מנהל מסלולים יציב, שפועל כמרכז בקרת איכות להחלטות המעקב. הוא מסנן זיהויים לא וודאיים, מנהל כמה זמן רכב יכול להיעלם מאחורי רכב אחר או מכשול לפני שיינתן כא "נעלם", ומסיר אובייקטים שאינם נעים לאורך זמן, כמו רכבים חונים או מחסומי כביש. ספי זמן ותנועה שנבחרו בקפידה מאפשרים למערכת להבדיל בין רכב שמוסתר לזמן קצר במנהרה לבין רכב שעזב באמת את הסצנה או עבר למצלמה אחרת. ביחד, כללים אלה עוזרים לשמור על זהויות עקיבות לכל רכב, ומפחיתים קפיצות פתאומיות, אובדנים או מיזוגים שגויים בין מסלולים.
מה משמעות הדבר לכבישים היומיומיים
בבדיקות בקנה מידה גדול על מנהרת כביש בסין ועל צומת עירוני סואן בארצות הברית, DGT השיגה דיוק גבוה תוך שהיא פועלת במהירות מספקת לשימוש בזמן אמת. בניגוד למערכות רבות מוקדמות שהתכוונו לסוג סצנה יחיד, DGT התמודדה עם זוויות מצלמה חופפות ולא-חופפות ללא צורך בקלט ידני מפורט לגבי פריסת הכבישים. עבור נהגים ותושבי העיר, מעקב איתן וגמיש כזה מאפשר למרכזי תנועה להגיב מהר יותר לתאונות, לעומס או להתנהגויות חריגות, באמצעות תמונה ברורה ורציפה יותר של תנועת כלי הרכב ברשת הכבישים והמצלמות.
ציטוט: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
מילות מפתח: מעקב כלי רכב במulti-מצלמות, מערכות תחבורה חכמות, ניטור תנועה בזמן אמת, ראייה ממוחשבת, ערים חכמות