Clear Sky Science · he
עיצוב ויישום של בקרת זרוע רובוטית בעלת 6 דרגות חופש עם זיהוי עצמים מבוסס למידת מכונה באמצעות מיקרובקר קטן
זרועות רובוט חכמות יותר בתקציב קטן יותר
דמיינו זרוע רובוטית במפעל שמזהה עצם, מחליטה כיצד לאחוז בו ונעה למקומו בצורה חלקה — וכל זאת בלי להסתמך על מחשב גדול או חיבור ענן. מאמר זה מתאר בדיוק את זה: זרוע רובוטית בעלת שישה מפרקים (6-DoF) ש״רואה״ וחושבת באמצעות מיקרובקר זעיר ובמחיר נמוך. לקוראים המתעניינים באופן שבו בינה מלאכותית עוזבת את מרכזי הנתונים ונכנסת למכונות יומיומיות, עבודה זו מראה כיצד ראייה ושליטה מתקדמות יכולות לפעול על חומרה שלא גדולה בהרבה ממחבר USB.
מדוע הקטנת ה״מוחות״ של הרובוטים חשובה
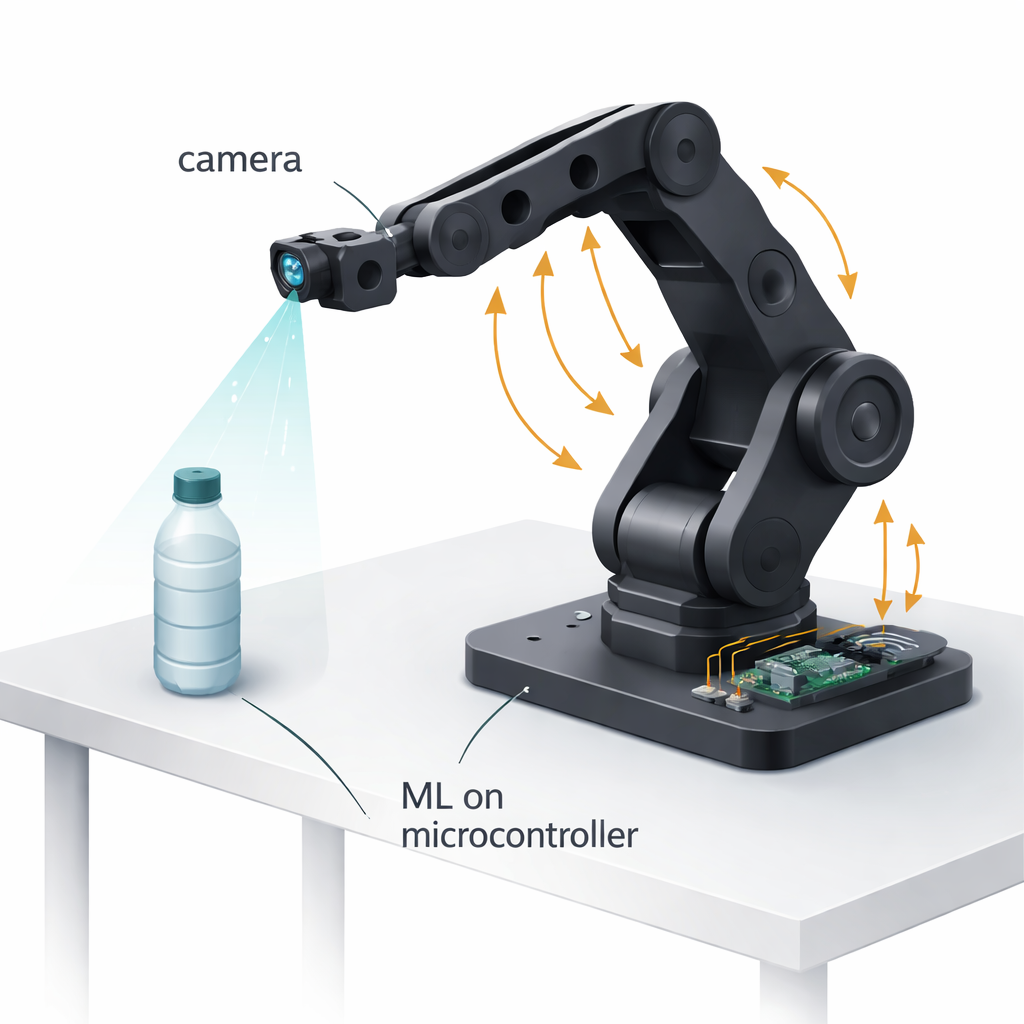
רוב הרובוטים התעשייתיים המסורתיים תלויים לעתים קרובות במחשבים חיצוניים חזקים לזיהוי עצמים ותכנון תנועה. זה מוסף עלויות, חיווט ומורכבות טכנית, מה שיכול להוות גורם מגביל לעסקים קטנים ובינוניים. החוקרים ביקשו להוכיח שמיקרובקר יחיד וזול יכול לעשות כמעט הכל: לזהות עצמים, להעריך את מיקומם בתלת־ממד, לתכנן את תנועת הזרוע ולהניע את המנועים שמבצעים את המשימה. על ידי שמירה של העיבוד על גבי המכשיר, המערכת הופכת לניידת יותר, חסכונית יותר באנרגיה וקלה יותר לפריסה בסביבות צפופות או משתנות — החל ממפעלים קטנים ועד מעבדות הוראה.
זרוע גמישה שבונה את עצמה
הצוות תכנן זרוע רובוטית בעלת שישה מפרקים מאפס בעזרת חלקים מודפסים בתלת־ממד ברובם, כדי לשמור על משקל נמוך ועל עלות נמוכה. מנועי סרוו הובי בעלי מומנט גבוה מניעים כל מפרק, והחוקרים שינו מנועים אלה כך שיוכלו לדווח בזמן אמת על הזוויות המדויקות שלהם, מה שמאפשר שליטה סגורה ומדויקת. מחזיק אובייקט (גריפר) מותאם דו־אצבעי בקצה כולל חיישן זרם פשוט: על ידי מעקב אחרי כמה זרם החשמלי מנוע הגריפר צורך, המערכת מסוגלת להסיק עד כמה היא לוחצת ולהתאים את האחיזה אוטומטית כדי להחזיק עצמים בטוחים בלי לרסק או לשחררם. על ה״פרק כף היד״ של הזרוע מותקן מצלמה קטנה ברזולוציית Full HD הנעה עם הזרוע, שמספקת למערכת ראייה מנקודת מבט ראשונה של הסצנה מול הגריפר.
לימוד שבב זעיר לזהות בקבוקים
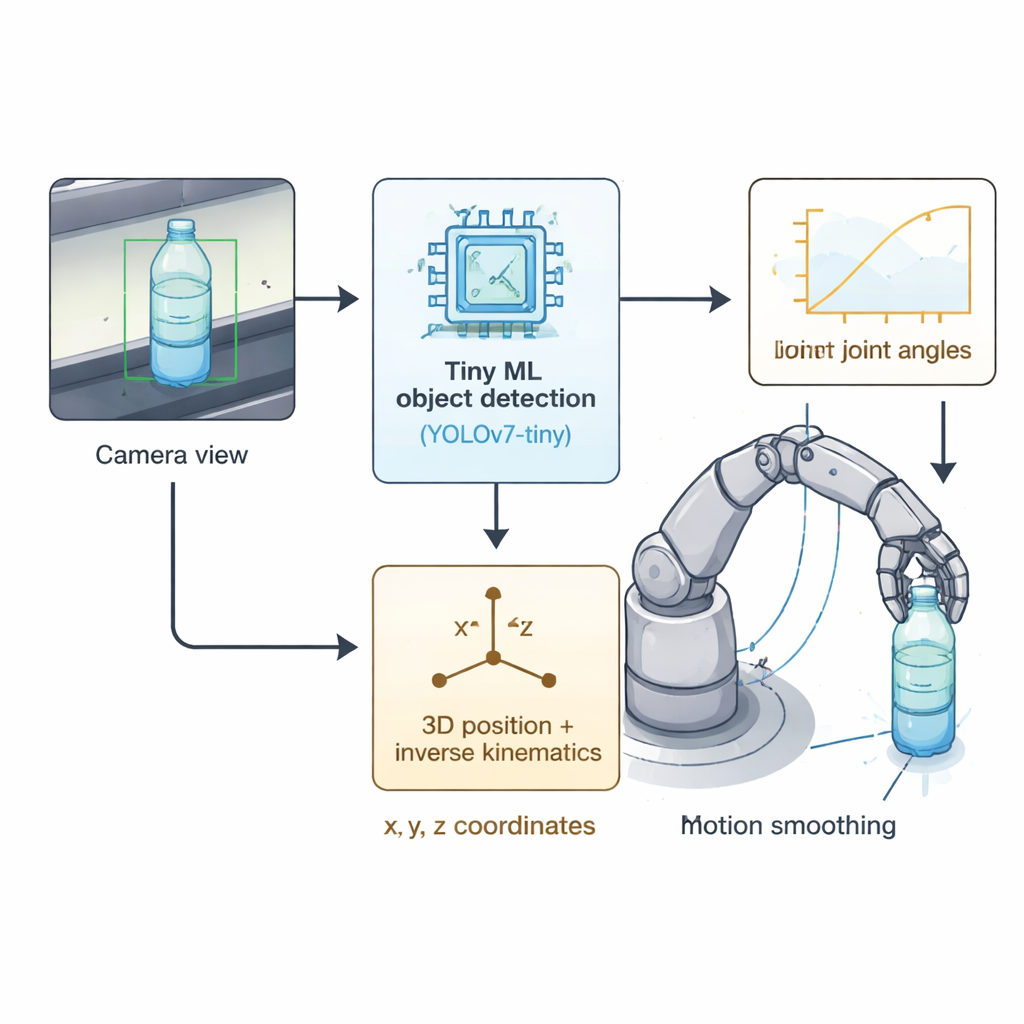
בלב מערכת הראייה נמצא גרסה מקוצרת של רשת זיהוי עצמים פופולרית בשם YOLOv7-tiny. החוקרים אימנו את המודל על יותר מ־2,500 תמונות של בקבוקי מים מפלסטיק שצולמו בטווח רחב של זוויות תאורה, מרחקים וחסימות חלקיות. לאחר אימון על כרטיס גרפי עוצמתי, דחסו את המודל לצורת "tiny ML" בעלת ייצוג 8 ביט כדי שיתאים לזיכרון המוגבל ולכוח העיבוד של המיקרובקר AMB82-Mini. גם בגירסה המוקטנת הזו המודל השיג דיוק של כ־88% בזיהוי בקבוקים ופעל במהירות מספקת — בסביבות 7–8 מסגרות לשנייה — למשימות אחיזה והנחה בזמן אמת ישירות על המיקרובקר, ללא צורך במחשב או בענן.
מפיקסלים לתנועה מדויקת
כאשר המצלמה מזהה בקבוק, המערכת מחשבת את מרכז תיבת הגילוי בתמונה ומעריכה את המרחק על פי גודל הופעתו בפיקסלים. כך נוצרות קורדינטות x, y ו‑z במרחב. מפענח מתמטי מותאם מתרגם את הקורדינטות האלה לשש הזוויות שכל מפרק הזרוע צריך להגיע אליהן, באמצעות גאומטריית רובוט סטנדרטית אך מותאמת לפעולה מהירה על המעבד הזעיר. תוכנת הבקרה, מאורגנת כמכונת מצבים פשוטה, עוברת דרך מצבי מציאת עצם, גישה אליו, סגירת הגריפר תוך שימוש בחיישן הזרם כ״חוש״, ואז העברת העצם לנקודת הורדה קבועה. כדי לשמור על תנועות חלקות ולהימנע מרעידות, הצוות משתמש בעקומות החלקה (easing) מעוצבות בקפידה ובשיטת מודולציית מתח מיוחדת שמפחיתה רעידות ומניעת חריגה מตำודה של המנועים.
מבחנים בעולם האמיתי ומה שהם מראים
בניסויים חוזרים, המערכת המשולבת הדגימה יכולת להרים ולהניח בקבוקי פלסטיק במשקל עד 300 גרם עם שיעור הצלחה של 100%, ועדיין להתפקד היטב בעומסים כבדים יותר עד 500 גרם. סימולציות ומדידות הראו שהשגיאות במיקום היו בדרך כלל סביב מילימטר אחד — דיוק מספק למשימות מיון ואריזה רבות. בהשוואה לתכניות בקרה פשוטות יותר, אסטרטגיית בקרת המנועים של המחברים הקטינה את הרטט, קיצרה את זמן הייצוב של הזרוע וביטלה התנהגות זזיזה. למרות שהמבחנים התרכזו בסוג עצם אחד ובמרחקים קבועים בתנאי פנים מבוקרים, הם מספקים ראיה משכנעת שמערכות תפיסה ובקרה רציניות יכולות להיות דחוסות ללוח משובץ יחיד ועניו למדי.
מה המשמעות הזו לאוטומציה יומיומית
עבור לא־מומחים, המסקנה המרכזית היא שהיכולות המתקדמות של "לראות" ול"נוע" כבר אינן שמורות לרובוטים יקרים ועוצמתיים. על ידי שילוב של דגמי למידת מכונה זעירים, גאומטריה חכמה ובקרת מנועים קפדנית על מיקרובקר זול, עבודה זו מציגה דרך לעבר זרועות רובוט קומפקטיות ועצמאיות שניתן לאמץ באופן מעשי על ידי יצרנים קטנים, בתי ספר וחובבים. ככל שגרסאות עתידיות יתמכו בסוגים נוספים של עצמים ובסביבות מגוונות יותר, מערכות משובצות דומות עשויות לאוטומט משימות פיק אנד פלייס פשוטות רבות, ולהפוך את הרובוטיקה החכמה לנגישה להרבה יותר אנשים ומקומות.
ציטוט: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
מילות מפתח: רובוטיקה משובצת, למידת מכונה זעירה, בקרת זרוע רובוטית, זיהוי עצמים, אוטומציה תעשייתית