Clear Sky Science · he
זיהוי סטטוס חזית העבודה במכרה פחם מבוסס YOLOv8-EST
עיניים חכמות עמוק מתחת לפני השטח
מכרות הפחם המודרניים מלאים במכונות עוצמתיות העובדות במנהרות חשוכות ומלאות אבק, שבהן הראות האנושית לקויה ושולי הבטיחות קטנים. מחקר זה מציג מערכת בינה מלאכותית חדשה בשם YOLOv8-EST, שעוזרת למכרות "לצפות" ברצף בחזית העבודה — האזור שבו הפחם נכרש בפועל — ולשפוט באופן אוטומטי האם מכונות מפתח פועלות כסדרן. על ידי ביצוע זה במהירות ובדיוק על מחשבים מוגבלים בשטח, המערכת שואפת להעלות את רמת הבטיחות והיעילות בלי צורך בחדר מלא בשרתים רבי עוצמה.
מדוע חשוב לפקח על חזית העבודה
סין היא היצרנית הגדולה בעולם של פחם, ומכרותיה נתונים ללחץ להיות בטוחים, נקיים ויעילים יותר. בחזית עבודה ממוכנת במלואה תוף חותך מסתובב חותך את הפחם מהמישור, בעוד מסועי גרר ורצועות מעבירים אותו והמערכות המרוססות מדכאות את האבק. אם אחד מהרכיבים הללו נכשל או מתנהג בצורה חריגה, הייצור עלול לרדת ועלולות להתרחש תאונות. המעקב המסורתי מסתמך במידה רבה על ניסיונם של עובדים וחיישנים פשוטים, שנאבקים בתנאים של תאורה חלשה, אבק סחף, סנוור וחסימות תכופות על ידי ציוד נע. המחברים מגדירים "זיהוי סטטוס חזית העבודה" כאיתור בזמן אמת של מצבים נורמליים וחריגים של רכיבים מרכזיים אלה, תוך שימוש אך ורק בתמונות וידאו — נתיב מושך לעבר מכרות באמת חכמים.
מגבלות הראייה הממוחשבת הקיימת במכרות
בשנים האחרונות נרשם גל הצלחות בזיהוי עצמים מבוסס בינה מלאכותית, במיוחד עם מערכות מהירות כמו משפחת YOLO (You Only Look Once). דגמים אלה יכולים לזהות ולתייג עצמים רבים בתמונה בשבריר שנייה. עם זאת, רוב השיפורים בדיוק הגיעו על חשבון רשתות עמוקות וכבדות יותר, שדורשות כוח חישוב רב יותר ממה שמצוי בדרך כלל בחזית המכרה. גלאים חלופיים כמו Faster R-CNN, RetinaNet, EfficientDet ומערכות מבוססות טרנספורמר יכולים להיות מדויקות מאוד, אך לעתים קרובות הם איטיים מדי או צורכים משאבים רבים מדי עבור תנאים תובעניים ודינמיים מתחת לאדמה. בנוסף, דגמים סטנדרטיים אינם מותאמים לבעיות הוויזואליות המיוחדות במכרות — ניגודיות קיצונית, אבק מסתחרר, מבטים חלקיים על מכונות ורקעים שמשתנים תמיד.
מנוע זיהוי רזה אך עוצמתי
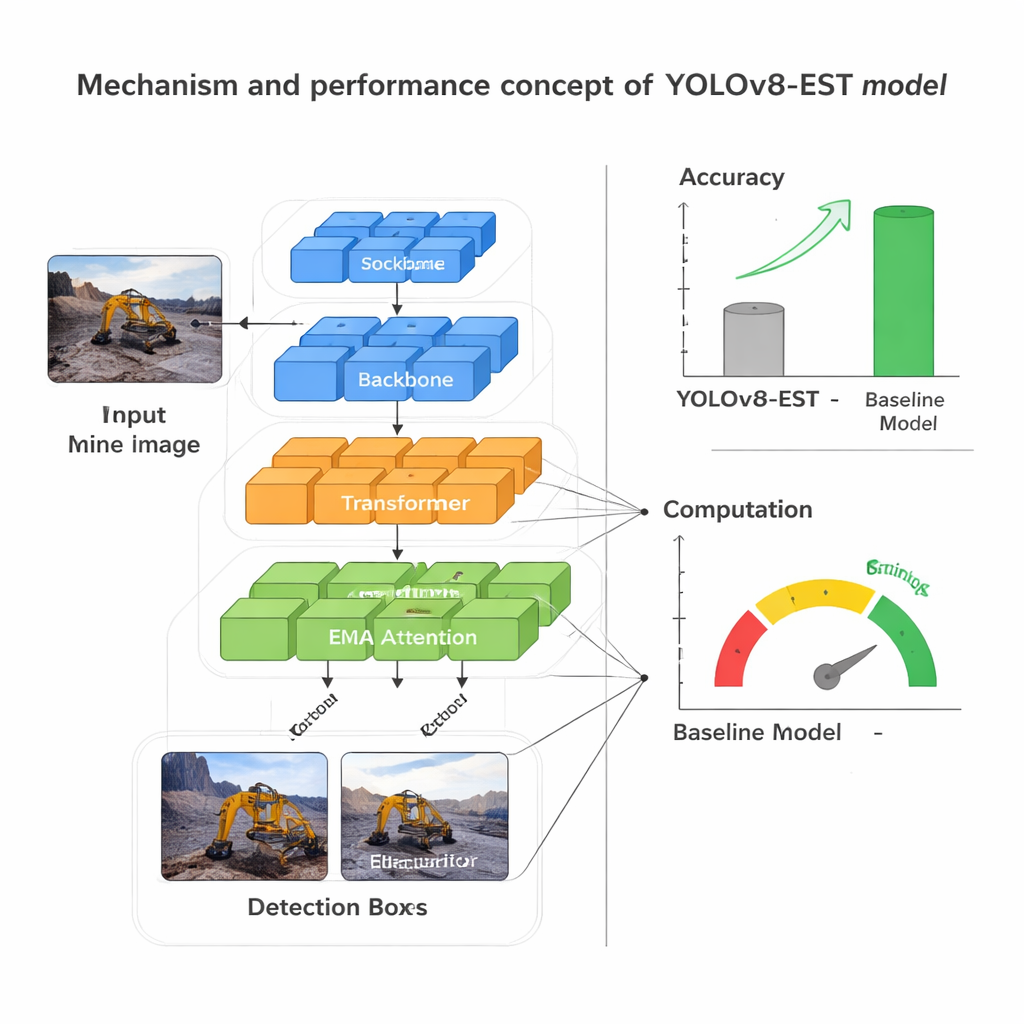
כדי להתמודד עם המגבלות הללו, החוקרים בונים על YOLOv8, גלאי בזמן אמת עדכני, ומעצבים אותו מחדש במיוחד עבור כריית פחם, ויוצרים את YOLOv8-EST. הרעיון המרכזי הוא להוסיף רכיבי עיבוד תכונות חכמים בלי להנפח את המודל. ראשית, הם מכניסים בלוקי Swin Transformer — מודולים שמשתמשים במנגנון תשומת לב בתוך חלונות תמונה קטנים ובין חלונות מוזזים — כדי לתפוס גם פרטים מקומיים וגם דפוסים בטווח ארוך, כמו צורת קו מסוע או קווי המתאר של גוף החותך. שנית, הם משפרים את הבנת היחסים המרחביים על ידי יצירת קידודי מיקום יחסיים עם רשת עמוקה קטנה במקום נוסחאות ליניאריות פשוטות, מה שעוזר להבחין, למשל, אם ענן ריסוס מיושר כראוי עם תוף החיתוך. שלישית, הם מציגים פונקציית הפעלה מותאמת בשם GELUS, המתואמת מתמטית להגיב בצורה חלקה ויעילה לסוגי האותות הרועשים ובעלי הניגודיות הנמוכה הנפוצים בתמונות ממכרה, מה שמקטין חישוב תוך שמירה על יציבות הלמידה. לבסוף, מודול תשומת לב EMA משתמש באסטרטגיית ממוצע נע מעריכי כדי לשלב מידע תכונתי נוכחי ומעבר, מה שעוזר לרשת להתמקד באזורים החשובים באמת ולהשקיט רקעים רעשניים ומחולפים.
בדיקת המערכת
הצוות אסף מאגר תמונות ייעודי מחזית פחם ממוכנת במלואה, שנקרא מאגר CM, עם 10,862 תמונות. הסצנות כוללות את גוף המכונה, תוף החיתוך, מסוע גרר, מסוע רצועה ומערכת הריסוס בתנאי תאורה ואבק שונים. הם חילקו את הנתונים לתת-קבוצות לאימון, לאימות ולמבחן וגם קיבצו תמונות לתנאי תאורה נמוכה/אבק גבוה, בינוניים ונורמליים כדי לבדוק את החוסן. באמצעות מדדי איכות סטנדרטיים — דיוק (precision), זיהוי (recall) וממוצע דיוק (mAP) — הם השוו את YOLOv8-EST עם מודלים קלים כמו YOLOv3-tiny ו-SSD-Mobilenetv2, גרסאות יו.או.אל.או פופולריות כמו YOLOv5 ו-YOLOv8, גלאים כבדים של שני שלבים כגון Faster R-CNN ו-RetinaNet, ועיצובים מבוססי טרנספורמר כולל DETR ו-RT-DETR. בכל המבחנים הללו, YOLOv8-EST סיפק את האיזון הטוב ביותר: כ-98% דיוק וזיהוי וממוצע דיוק גבוה מאוד, תוך שמירה על קומפקטיות המספיק עבור שימוש בזמן אמת על כרטיס גרפי תעשייתי יחיד.
מה משמעות הדבר עבור בטיחות במכרות
ללא מומחיות מיוחדת, המסקנה המרכזית היא שהמחקר הזה הופך וידאו גולמי ומעונן מתחת לאדמה לדו"חות סטטוס אמינים ואוטומטיים על ציוד כרייה קריטי. במקום להטיל על עובדים להסתכל על מסכים עמומים מלאי אבק וטשטוש תנועה, YOLOv8-EST יכול לדגל כאשר מסוע נעצר, כאשר תוף אינו במקום שממנו צריך להיות, או כאשר מערכת הריסוס אינה פעילה — ובכך לעשות זאת ברמת דיוק שמגיעה לכמעט רמת האדם ובכל שעות היממה. על ידי התאמה מדוקדקת של טכניקות בינה מודרניות להרצה יעילה בחזית המכרה — ולא רק במרכזי נתונים מרוחקים — המערכת מציעה מסלול פרקטי לייצור פחם בטוח, יציב וחכם יותר.
ציטוט: Wang, H., Wu, G., Yang, Q. et al. Working face status detection in coal mine based on YOLOv8-EST. Sci Rep 16, 7787 (2026). https://doi.org/10.1038/s41598-026-35452-2
מילות מפתח: בטיחות במכרות פחם, זיהוי עצמים, ראייה ממוחשבת, למידה עמוקה, אוטומציה תעשייתית