Clear Sky Science · he
בקרת מצבי החלקה פאזית עתירת אלגוריתם סופר‑טוויסטינג למערכות תיאור T‑S פאזיות
להביא מערכות מורכבות להתנהגות רצויה
מאופן ניהול אוכלוסיות דגים ועד שמירה על יציבות רשתות כוח ושלבים אלקטרוניים — מערכות רבות בעולם האמיתי מתנהגות בצורה מסובכת ולא‑ליניארית. מהנדסים משתמשים באלגוריתמי בקרה מתקדמים כדי לשמור על בטיחות ויעילות של מערכות אלו, גם כאשר הן מוטרדות על‑ידי הפרעות ואי‑ודאות. מאמר זה מציג אסטרטגיית בקרה חדשה שמרככת את התנהגותן של מערכות סוררות אלה באופן חלק יותר, תוך הימנעות מהמנופים החדים והמתחלפים שעלולים לפגוע בציוד ולהרע את הביצועים.
מדוע חלק מהמערכות קשות לבקרה
מערכות מעשיות רבות נשלטות לא רק על‑ידי משוואות המתארות כיצד כמות משתנה בזמן, אלא גם על‑ידי אילוצים אלגבריים שחייבים להתקיים בכל רגע. מערכות תיאור כאלו מופיעות בכלכלה, ברשתות כוח, בקישורים מכאניים ובמודלים ביולוגיים. כדי להתמודד עם התנהגותן הלא‑ליניארית, חוקרים משתמשים לעתים בדגמי טאקאשי–סוגנו (T‑S) פאזיים, שמייצגים מערכת מורכבת כערבוב של מקטעים ליניאריים פשוטים התקפים באזורים תפעוליים שונים. למרות כוחן, מסגרת זו סבלה זמן רב ממחסום טכני: רוב שיטות הבקרה הנחילו הנחות מוקדמות לגבי איך פונקציות החברות הפאזיות משתנות בזמן, אף על פי ששינויים אלה תלויים בפועל בהתנהגות העתידית הבלתי‑ידועה של המערכת והבקר.
סוג חסין רך יותר של בקרה
בקרת מצב החלקה היא שיטת בקרה חסינה פופולרית הידועה ביכולתה לכפות מערכת במהירות על מסלול רצוי ולשמור אותה שם למרות הפרעות. היא עושה זאת על‑ידי החלפת הקלט הבקרתי באופן המנוגד לאי‑הוּתוּת. עם זאת, ההחלפה המהירה עלולה לגרום ל"צְרְצְרִים" — תנודות בתדר גבוה שאינן רצויות ואף מזיקות במערכות מכניות ואלקטרוניות. אלגוריתם הסופר‑טוויסטינג, צורה מתקדמת של בקרת מצב החלקה, מסתיר את ההחלפה בתוך תהליך פנימי ומייצר אות בקרה רציף ששומר על החסינות תוך הפחתת הצרצורים. עד כה, הטכניקה היתה מוגבלת בעיקר למערכות בעלות כניסה יחידה או דרשה פירוק מערכות מרובות כניסות למספר בקרים נפרדים — דבר שתובעני מבחינה חישובית.
משטח החלקה חדש בלי הנחות מוסתרות
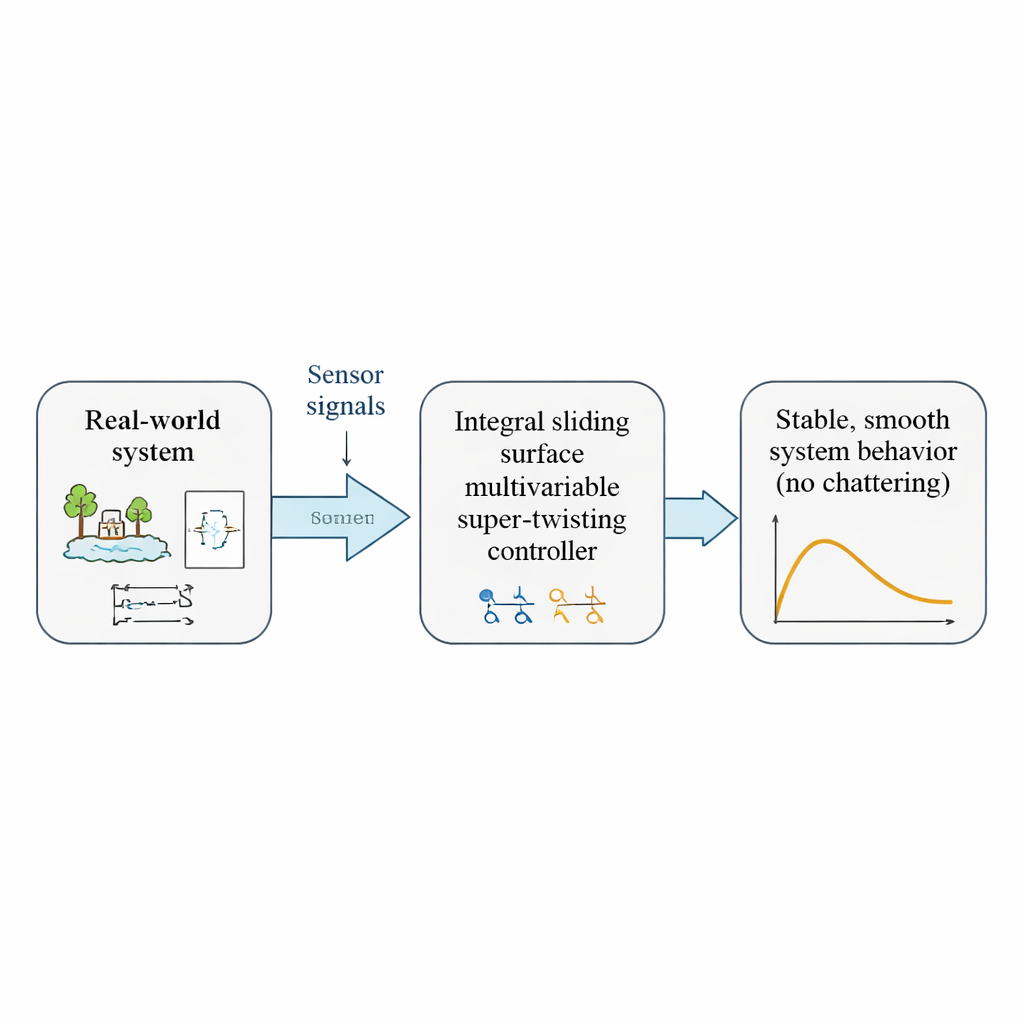
התרומה המרכזית הראשונה של המחברים היא משטח החלקה "אינטגרלי" חדש שתוכנן במיוחד למערכות תיאור T‑S פאזיות. בפשטות, משטח זה הוא תנאי מתמטי הכולל הן את התנהגות המערכת הנוכחית והן את הצרוף המצטבר של העבר. באמצעות בנייה חכמה של משטח זה, המחברים מראים שהם יכולים להבטיח תנועת מערכת רצויה ברגע שהמערכת נמצאת על המשטח, מבלי להזדקק לכל גבולות מוקדמים על אופן שינוי פונקציות החברות הפאזיות. בכך מוסרת הנחה מגבילה שהגבילה שיטות קודמות. הניתוח עושה שימוש בפונקציות דמויות‑אנרגיה שנבחרו בקפידה כדי להוכיח שהתנהגות המערכת על משטח ההחלקה נשארת יציבה לאורך זמן.
בקר סופר‑טוויסטינג מרובה משתנים
בהתבסס על משטח ההחלקה הזה, המאמר מפתח גרסה מרובת‑משתנים של אלגוריתם הסופר‑טוויסטינג. במקום לתכנן בקר אחד לכל כניסה או לכל משתנה החלקה, השיטה מטפלת בכולם יחד בצורה מטריציאלית. זה הופך אותה מתאימה יותר למערכות שבהן מצבים שונים קשורים זה לזה בחוזקה, כמו מינים באקוסיסטם שמשפיעים זה על זה או זרמים ומתח במעגל. המחברים מנבאים תנאים לבחירת גאיני הבקר כך שמצבי המערכת יגיעו למשטח ההחלקה מיידית ואז יתכנסו בזמן סופי. מכיוון שאות הבקרה רציף ולא מתחלף בחדה, הצרצורים מדוכאים מעצם תכנון המערכת, בעוד שהחסינות בפני הפרעות נשמרת.
הוכחה באמצעות ביולוגיה ואלקטרוניקה
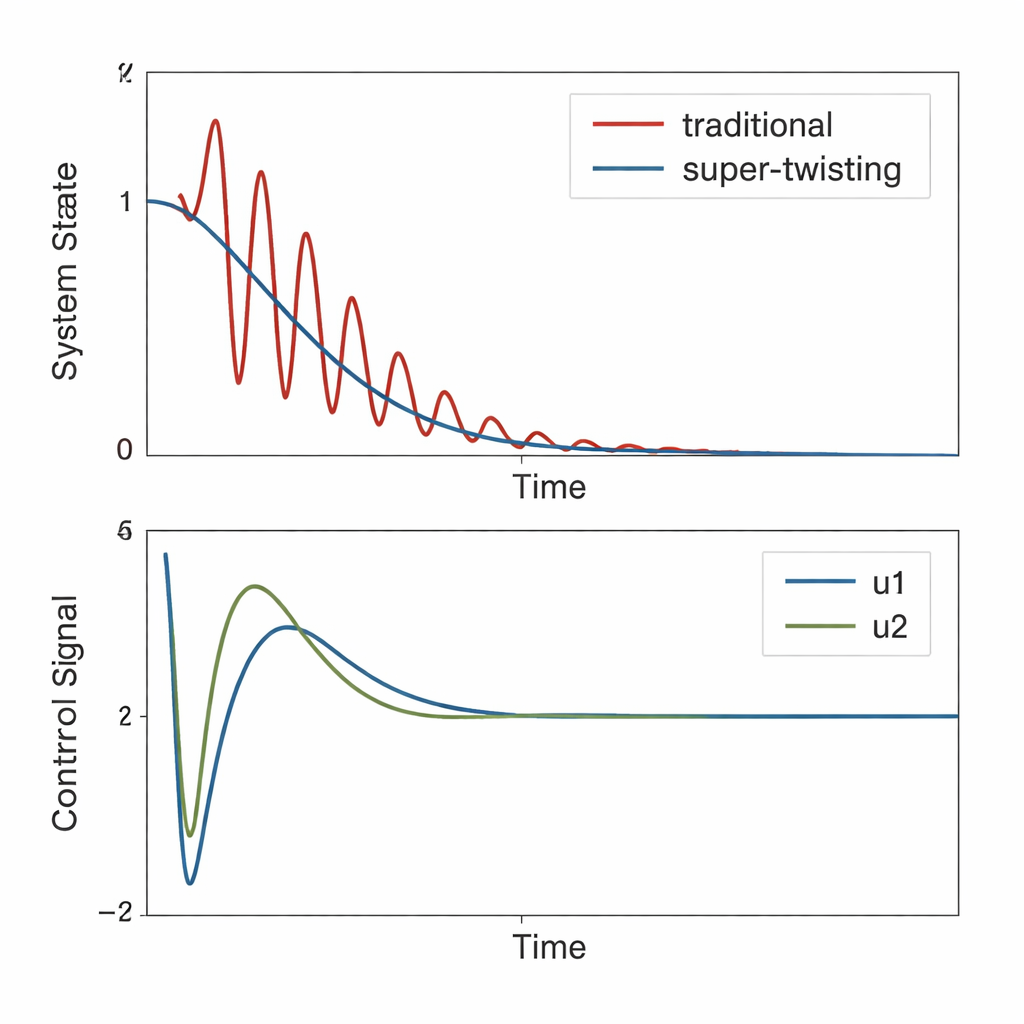
כדי להדגים את מעשיות השיטה, המחברים מיישמים אותה על שתי מערכות תיאור לא‑ליניאריות שונות. הדוגמה הראשונה ממחישה תרחיש ביואקונומי הכולל אוכלוסיות של פרטים לא־בוגרים ובוגרים של מין, יחד עם משתנה המשקף יכולת רבייה ופעולות ניהול כמו דיג ורגולציה. הדוגמה השנייה היא מעגל דיודה‑מנהרה לא‑ליניארי, מגרש מבחן קלאסי באלקטרוניקה. בשני המקרים, סימולציות מראות שהבקר המוצע מייצב במהירות את מצבי המערכת ושומר על משתני ההחלקה קרובים לאפס — מצביע על מעקב מדויק אחר ההתנהגות הרצויה. בהשוואה לבקרי מצב ההחלקה המסורתיים, הגישה החדשה מצמצמת באופן משמעותי את התנודות הן בתגובה המערכתית והן באותות הבקרה.
מה המשמעות בעשייה המעשית
עבור הלא‑מומחים, המסר העיקרי הוא שעבודה זו מציעה דרך לשמור על מערכות מורכבות, מוגבלות ובלתי‑בטוחות תחת בקרה מבלי להשתמש בהחלפה אלימה שתייגרה שיטות חסינות קודמות. על‑ידי שילוב דגום פאזי, משטח החלקה אינטגרלי ואלגוריתם סופר‑טוויסטינג מרובת‑משתנים, המחברים מעצבים בקרים שיש להם הן הוכחות מתמטיות ליציבות והן תפעול חלק יותר בפועל. זה יכול להועיל ליישומים החל מניהול משאבים אקולוגיים ועד לאלקטרוניקה כוח מתקדמת ולמערכות בקרה מרושתות, במיוחד ככל שעבודות עתידיות ירחיבו רעיונות אלה להגנות סייבר כאשר התקשורת עלולה להיפגע על‑ידי התקפות.
ציטוט: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
מילות מפתח: בקרת מצבי החלקה, מערכות פאזיות, בקרה חסינת הפרעות, דינמיקה לא‑ליניארית, אלגוריתם סופר‑טוויסטינג