Clear Sky Science · he
בקר אדפטיבי עם ייחוס חסין עבור מניפולטור מישורי בן 3 דרגות חופש
זרועות רובוט חכמות יותר למשימות קשות יותר
זרועות רובוטיות במפעלים מהירות ומדויקות להפליא, אך הביצועים שלהן עלולים להיחלש כאשר העולם האמיתי מתנהג לא צפוי — עומסים משתנים, חלקים מונחים מעט אחרת, או כוחות בלתי צפויים מטלטלים את הזרוע. מאמר זה בוחן דרך חדשה לשמור על דיוק ויציבות של זרוע רובוטית רגילה בעלת שלושה מפרקים גם כאשר קשה למודל את התנהגותה במדויק וכאשר קיימים הפרעות חזקות, מה שהופך את הרובוטים לשותפים אמינים יותר על רצפת הייצור.
מדוע שלושה מפרקים חשובים במפעלים אמיתיים
המחקר מתמקד ברובוט מישורי בעל שלושה מקטעים: שלושה קטעים קשיחים המחוברים במפרקי הסתובבות ונעים במישור אחיד. על אף הפשטות של התצורה הזו, היא מהווה את עמוד השדרה של מטלות איסוף והנחה רבות, קווי אריזה ומערכות הרכבה תעשייתיות. האתגר הוא שהתנועה של מפרק אחד משפיעה במידה רבה על האחרים, והמשוואות התיאורטיות המתארות את תנועת הזרוע לא־ליניאריות ומקושרות חזק. בקרים מסורתיים יכולים לפעול היטב כאשר כל הפרמטרים ידועים וניתנים לחיזוי, אך הם מתקשים כשמשקלים משתנים, חיכוך או מסות לא מדויקות, או כאשר הפרעות חיצוניות מזיזות את הזרוע מהמסלול.
לפצח תנועה מורכבת לחלקים פשוטים יותר
כדי להכניע את המורכבות הזו, המחברים ראשית גוזרים מודל מתמטי מפורט של תנועת הרובוט, כולל כיצד מסות הקטעים, זוויות המפרקים והכבידה משולבים ליצירת תנועה. הם מציגים לאחר מכן פישוט מרכזי: אסטרטגיית "בידוד". במקום להתייחס לרובוט כמערכת תלת־מפרקית מסובכת אחת, כל מפרק ממודל כאילו התאוצה שלו תלויה בעיקר במומנט המנוע והמהירות שלו. ההשפעות הנשארות — כגון אינטראקציות בין מפרקים, איברי כבידה והשפעות שקשות למודל — נארזות יחד ונטבעות כאי־ודאויות. בידוד זה מאפשר לפצל את בעיית הבקרה לשלוש תת־מערכות קטנות ונוחות יותר לניהול, אחת לכל מפרק, תוך הכרה בכך שהמערכת האמיתית עדיין פרועה מתחת לפני השטח. 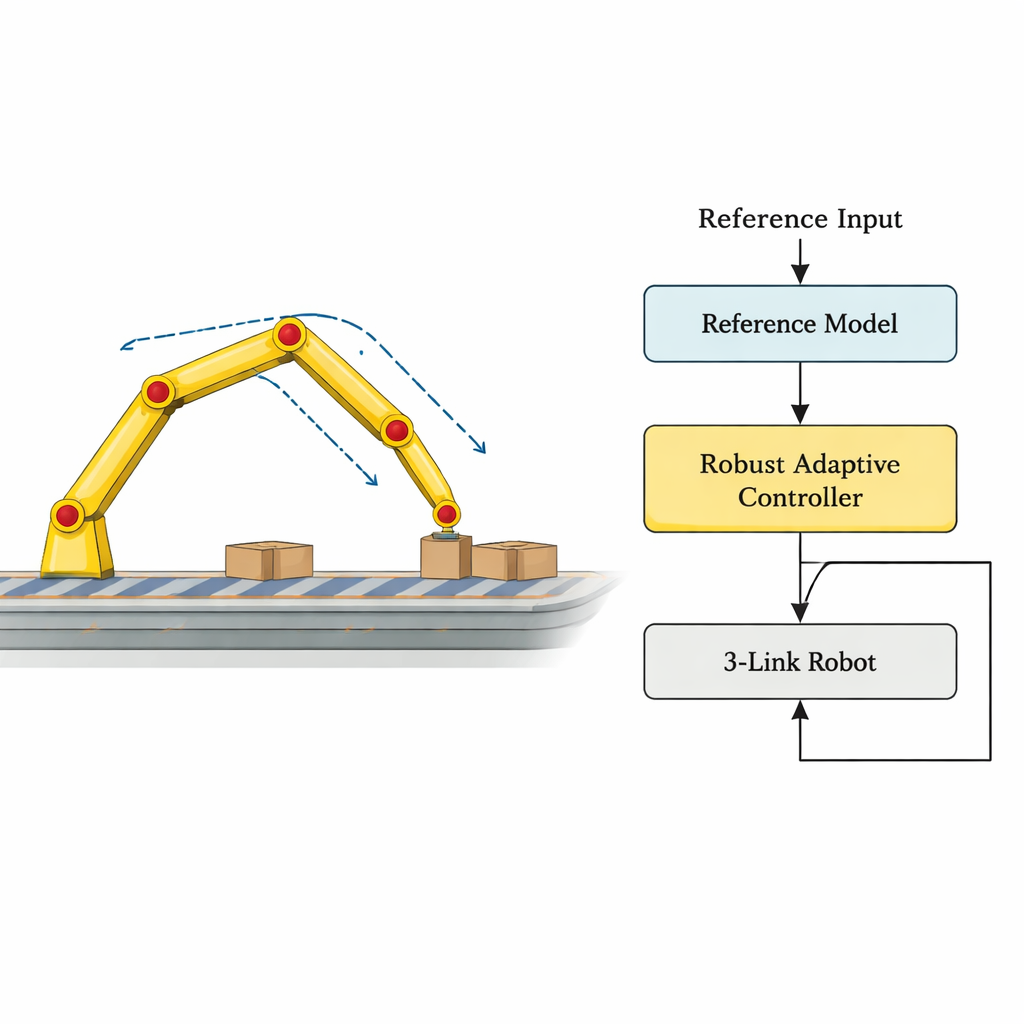
ללמד את הרובוט לעקוב אחרי מטרה נעה
על בסיס המודל הפשוט הזה בונים המחברים בקר אדפטיבי עם ייחוס למודל (MRAC). בפשטות, הם מגדירים תחילה תגובה אידיאלית — מודל ייחוס שאומר כיצד כל מפרק צריך לנוע לאורך זמן בעת מתן פקודה. הבקר משווה ברציפות בין התנועה האמיתית של הרובוט לבין האידיאל הזה ומכייל בזמן אמת את ההגברות הפנימיות כדי להקטין את ההפרש. בתנאים מושלמים, MRAC קונבנציונלי יכול לגרום לרובוט לעקוב מקרוב אחרי הייחוס, אך יש לו חולשה משמעותית: בנוכחות הפרעות מתמשכות או שגיאות במודל, ההגברות האדפטיביות עלולות לנוע באופן בלתי מבוקר לערכים קיצוניים, מה שמוביל לרעידות, בזבוז אנרגיה ואף אובדן יציבות. תופעה זו, המכונה סחף פרמטרי, הופכת את ה‑MRAC הפשוט למסוכן לשימוש תעשייתי אמיתי.
להפוך את ההתאמה לחסינה, לא פרועה
כדי למנוע סחף זה, המאמר מפתח מספר גרסאות "חסינות" של MRAC המתחשבות במפורש בהשפעות לא ידועות. המחברים מוסיפים מונחים נוספים לחוקי ההתאמה שמושכים בעדינות את הגיינים של הבקר חזרה לתחומי בטחון או שמקזזים את מאמץ ההתאמה לפי גודל שגיאת המעקב. בין האסטרטגיות הנבדקות — הידועות כשינוי־סיגמא, שינוי־שגיאה ותיקון אופטימלי מודע אנרגיה — בולטת האחרונה. דרך סימולציות ממוחשבות נרחבות, כולל מסלולים מתנדנדים במהירות, תנועות איסוף והנחה, שינויים במסה של 50 אחוז, הוספות משקל פתאומיות והפרעות תדירות גבוהות חזקות, ה‑MRAC החסין שומר על שגיאת מעקב קטנה ועל אותות בקרה חלקים. בתרחישים שבהם הגייני ה‑MRAC הקונבנציונלי גדלים ללא גבול, הגרסאות החסינות שומרות עליהם מסודרים ותנועת הזרוע יציבה. 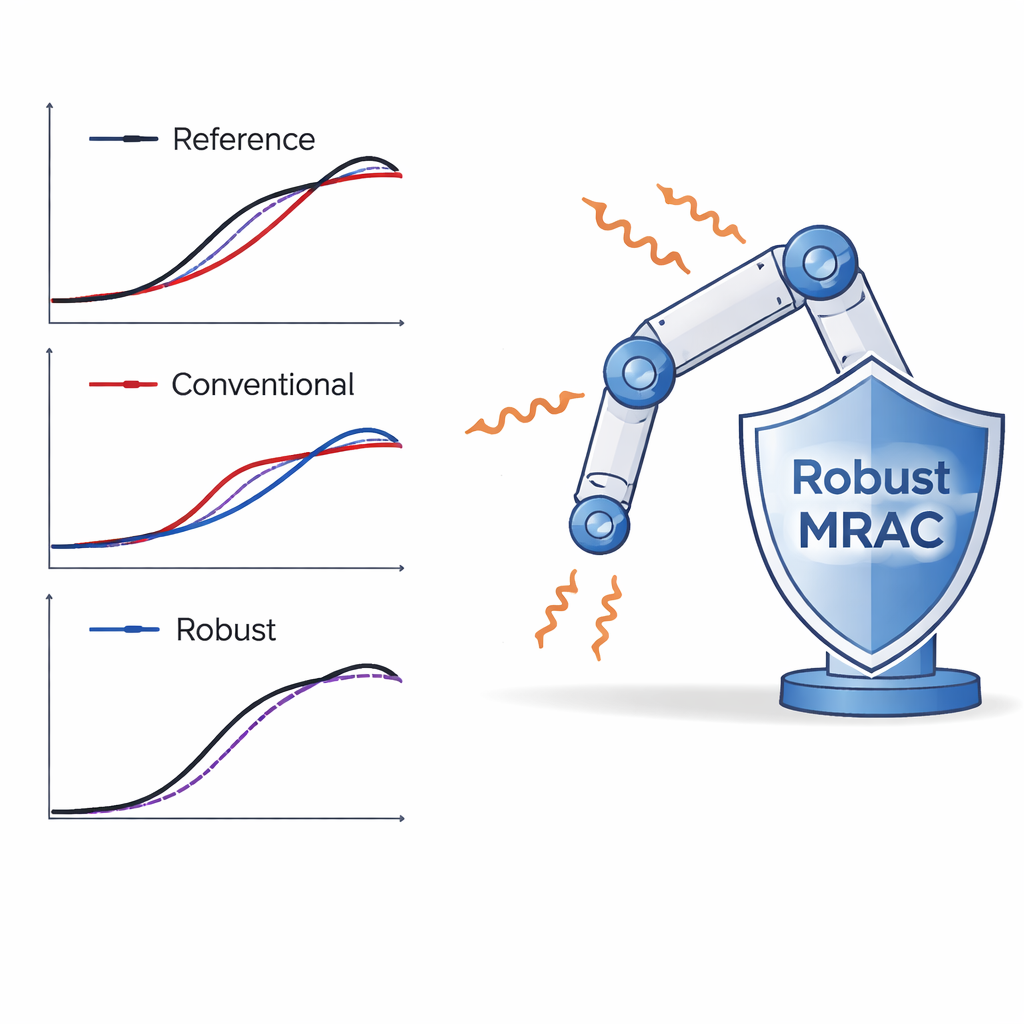
מה המשמעות הזו ברובוטים בעולם האמיתי
לקורא שאינו מומחה, המסקנה היא שעבודה זו מציעה "טייס אוטומטי" חכם יותר לזרועות רובוט תעשייתיות — כזה שממשיך ללמוד ולהתאים את עצמו, אך מבלי להפוך לבלתי יציב כשהסביבה או העומס משתנים. על ידי פירוק הדינמיקה המורכבת של שלושה מפרקים לחלקים פשוטים יותר והוספת אמצעי הגנה לתהליך הלמידה, הבקר האדפטיבי החסין המוצע מאפשר לרובוט לעקוב אחר מסלולים רצויים בדיוק תוך שימוש במאמץ מנוע סביר, גם תחת הפרעות ואי־ודאות. זה מקרב את הרובוטיקה הפרקטית צעד נוסף למערכות באמת מסוגלות "הכנס והפעל" שניתן להקצות להן משימות במהירות, להתמודד עם תנאים בלתי צפויים ולהפעיל בבטחה לצד בני אדם בלי כיוונון מתמיד על ידי מומחים.
ציטוט: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
מילות מפתח: בקרת מניפולטור רובוטי, בקרה אדפטיבית, רובוטיקה תעשייתית, מעקב מסלולים, בקרה חסינה