Clear Sky Science · he
YOLOv11n משופר לזיהוי עצמים קטנים בתמונות מחליפות אוויריות: דיוק גבוה יותר עם פחות פרמטרים
למה חשוב לזהות דברים זעירים מהשמיים
רחפנים קטנים הופכים במהירות לחלק מהשגרה — ממעקב תנועה ומענה לאסונות ועד משלוחי חבילות. יש בעיה עקשנית: כשרחפן מביט מטווחים של מאות מטרים, אנשים, מכוניות וסירות מצטמצמים למספר פיקסלים בודדים. מערכות ראייה ממוחשבת סטנדרטיות לעיתים מפספסות את הנקודות הללו או מערבות אותן עם רעשי רקע. מאמר זה מציג גרסה חכמה וקומפקטית של מערכת זיהוי פופולרית, YOLOv11n, שמותאמת במיוחד לאיתור עצמים זעירים בתמונות רחפן ובמקביל פועלת ביעילות על מחשבים משולבים קלים.
לגלות יותר בפרטים קטנים ומטושטשים
תמונות רחפן הן סביבת מבחן קשה עבור אלגוריתמים. רוב היעדים קטנים מ-32×32 פיקסלים, ורבים מתחת ל-16 פיקסלים רוחב. תנועה, רעידות, שינויי תאורה, אובך ורקעים עירוניים צפופים כולם מקשים עוד יותר על הבחנה של היעדים הקטנים. במקביל, רחפנים מסתמכים לעיתים על מעבדים צנועים וסוללות מוגבלות, ולכן דגמים כבדים אינם מעשיים. המחברים יוצאים מ-YOLOv11n, גלאי בזמן אמת קומפקטי, ומשדרגים את רכיביו הפנימיים כדי לסחוט יותר מידע שימושי מאזורי תמונה קטנים ובעלי ניגוד נמוך מבלי לנפח את המודל. המטרה שלהם פשוטה אך תובענית: שיפור משמעותי בדיוק על עצמים קטנים, עם מספר פרמטרים שלמד נמוך או שווה ובמהירות מקובלת על חומרת קצה.
ללמוד את הסצנה בקנה מידה רב
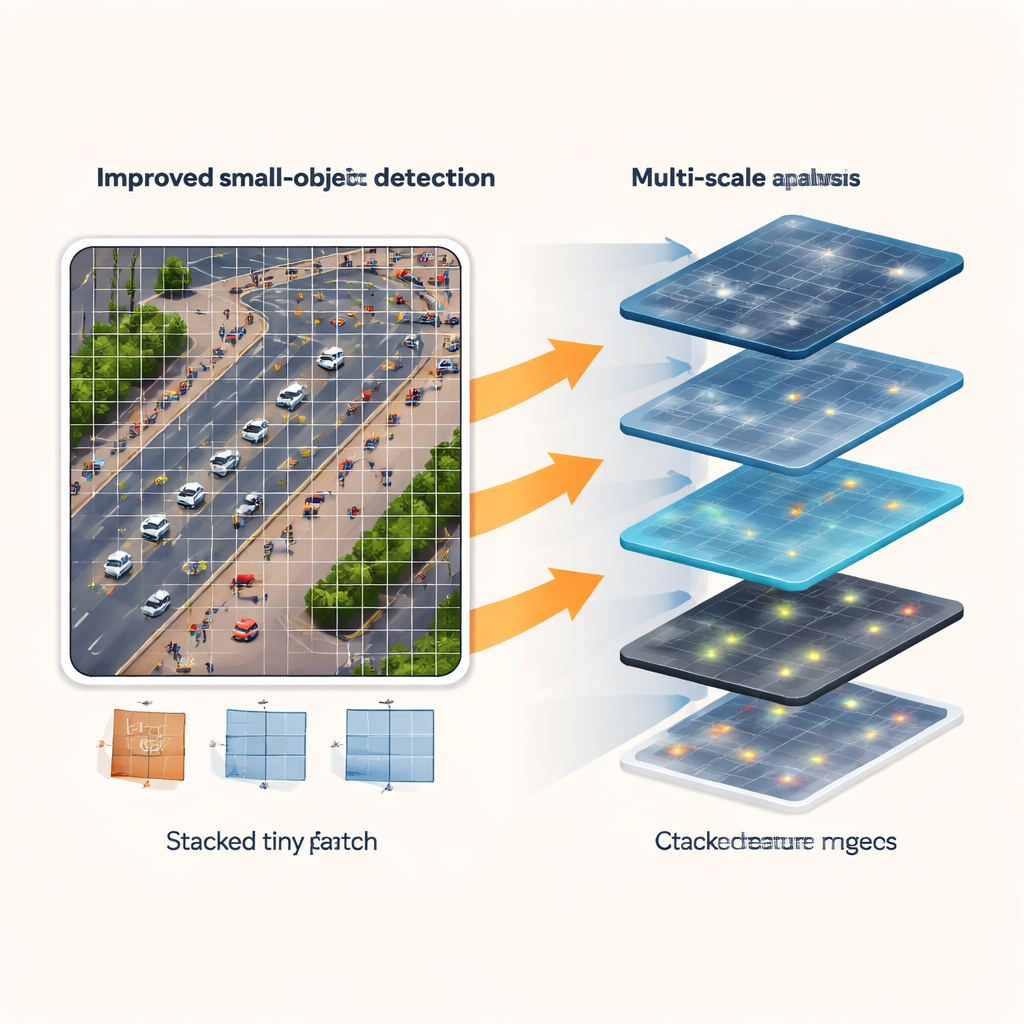
השיפור הראשון מתמקד באופן שבו הרשת "רואה" את הסצנה. במקום להסתכל דרך חלון בגודל אחד קבוע, המודול החדש Multiscale Edge-Feature Adaptive Selection (MSEAF) מתבונן בתמונה במספר סקלות בו-זמנית. תצפיות גסות תופסות את הפריסה הרחבה של כבישים, בניינים וההמון, בעוד תצפיות עדינות עוקבות אחרי מכוניות או אנשים בודדים. שלב חיזוק קצוות מדגיש גבולות וצורות שקל לאדם לזהות אך שנוטים להיטשטש בחתיכות תמונה זעירות. מנגנון המיזוג החכם מחזק אזורים אינפורמטיביים תוך דיכוי רעש רקע. ייצוג רב-סקלתי ורגיש לקצוות זה נותן לשאר הרשת נקודת פתיחה עשירה יותר לאיתור עצמים שקשה לראותם.
להשאיר עצמים קטנים מחיים לאורך הצינור
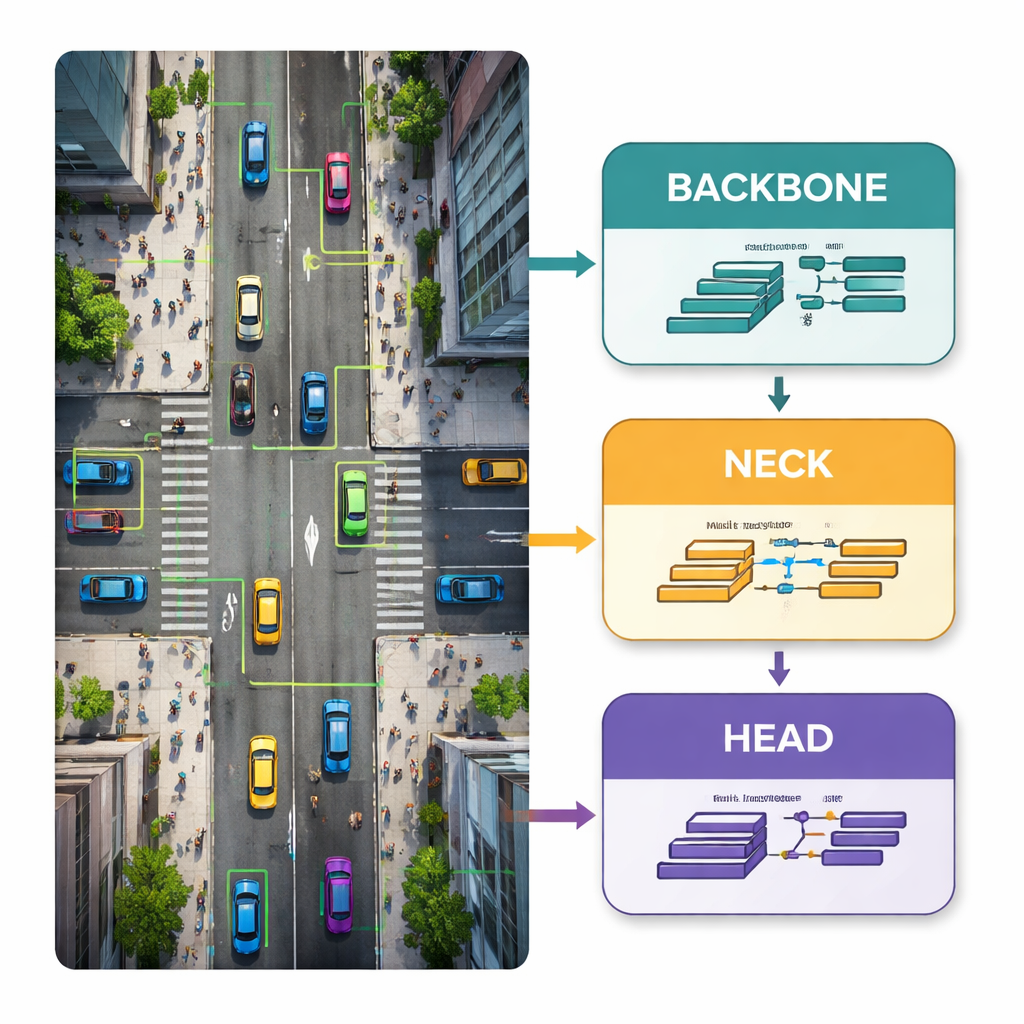
רשתות YOLO מסורתיות מצמצמות שוב ושוב את מפת התכונות כשהמידע זורם מהקלט לפלט. עבור עצמים גדולים זה בסדר, אבל לעצמים זעירים זה יכול להיות הרת אסון: אחרי כמה שלבי דגימה למטה, הולך רגל עשוי לתפוס רק פיקסל או שניים במפה פנימית, או להיעלם לגמרי. כדי למנוע זאת המחברים משנים את חלק ה"צוואר" האמצעי של הרשת ומוסיפים ראש זיהוי חדש P2 שעובד על תכונות ברזולוציה גבוהה יותר. מודולים מותאמים בשם ScalCat ו-Scal3DC משלבים בזהירות מידע משכבות שונות כך שפרטים דקים משכבות שטוחות והקשר עשיר יותר משכבות עמוקות יחזקו זה את זה. התוצאה היא גלאי ששומר על מעקב אחר מכוניות ואנשים קטנים במספר סקלות, במקום להקריבם בשביל מהירות.
החלטות חדות יותר עם פחות פרמטרים
הצעד הסופי הוא לפשט את שלב התחזיות, הידוע כראש הזיהוי. בעיצוב המקורי, שכבות עמוקות עם הרבה ערוצים הוקדשו בעיקר לעצמים גדולים, שמעטים יחסית בסצנות רחפן. ראש ה-Shared Re-parameterized Detection (SRepD) החדש מאזן את מספר הערוצים בין הסקלות ומשתמש בתחבולה חכמה לאימון: בזמן הלמידה מספר ענפי קונבולוציה מיוחדים בוחנים דרכים שונות להבליט תכונות; בזמן האינפרנציה הענפים הללו מאוחדים מתמטית לקונבולוציה אחת פשוטה. העיצוב המשותף הזה משפר את אופן מיזוג התכונות תוך כדי שהוא מפחית בפועל את מספר הפרמטרים ושומר על חישוב מנוהל למכשירי קצה.
מה המספרים מראים בבדיקות בעולם האמיתי
המודל המשופר נבדק בשלוש מערכות נתונים ציבוריות מאתגרות: VisDrone2019 (סצנות עירוניות מעורבות), TinyPerson (אנשים זעירים מאד על אדמה וים) ו-HazyDet (כלי רכב באובך כבד מנקודת מבט של רחפן). ב-VisDrone2019, העיצוב החדש מעלה מדד מפתח של דיוק (mAP50) ואת הדיוק החיזוי ב-4.6 נקודות אחוז לעומת YOLOv11n המקורי, תוך צמצום פרמטרים בכ־8.5 אחוז. ב-TinyPerson השיפורים גדולים אף יותר — כ־5.9 נקודות ב-mAP50 וכ־5.6 בניבוי — עם צמצום פרמטרים דומה, והמודל הקומפקטי אף גובר על YOLOv11s גדול בהרבה המשתמש פי ארבעה פרמטרים. בתנאי אובך, הגלאי המשודרג גם עולה על הבסיסית במדדי דיוק וחוסן, וכל זאת תוך שמירה על מהירות אמת-זמן בלוח קצה חסכוני בהספק Huawei Atlas 200 DK.
למה זה חשוב לשימוש יומיומי ברחפנים
לקהל הרחב, המסקנה העיקרית היא שהמחקר הזה מראה שרחפנים יכולים להיות גם חדי עין וגם חסכוניים במשאבים בו-זמנית. על-ידי חשיבה מחדש על איפה וכיצד הרשת מחפשת פרטים, שימור מידע ברזולוציה גבוהה עבור יעדים קטנים ופישטות מנגנון התחזיות, המחברים שורטים את הסח לבין דיוק לגודל. המערכת המתקבלת טובה יותר בזיהוי אנשים וכלי רכב מרוחקים וקטנים בסצנות צפופות, מטושטשות או מורכבות מבלי לדרוש חומרה מגושמת. התקדמות כזו מקרבת ניטור אווירי אמין בזמן-אמת לבטיחות תנועה, חילוץ וחיפוש ותצפיות סביבתיות לשימוש שגרתי.
ציטוט: Zhu, H., Xie, X. Enhanced YOLOv11n for small object detection in UAV imagery: higher accuracy with fewer parameters. Sci Rep 16, 5536 (2026). https://doi.org/10.1038/s41598-026-35301-2
מילות מפתח: זיהוי עצמים עם רחפנים, זיהוי עצמים קטנים, רשת עצבית YOLO, ניתוח תמונות אוויריות, בינה שפתית בקצות למטוסי UAV