Clear Sky Science · he
גישה ללימוד רב-מודאלי וסימולציה לתפיסה במערכות נהיגה אוטונומית
מכוניות אוטונומיות חכמות יותר
מכוניות אוטונומיות מבטיחות כבישים בטוחים יותר ותנועה חלקה יותר, אך רק אם הן באמת יכולות להבין את העולם שסביבן. מאמר זה בוחן דרך חדשה לעזור לרכבים אוטונומיים "לראות", "להרגיש" ו"להצפות" את סביבתם בדומה לנהג אנושי זהיר — באמצעות שילוב חיישנים שונים, בדיקה בטוחה בעותק וירטואלי של העולם האמיתי, והפיכת החלטות הרכב לשקופות יותר עבור בני אדם.
לראות את הדרך בעזרת "חושים" מרובים
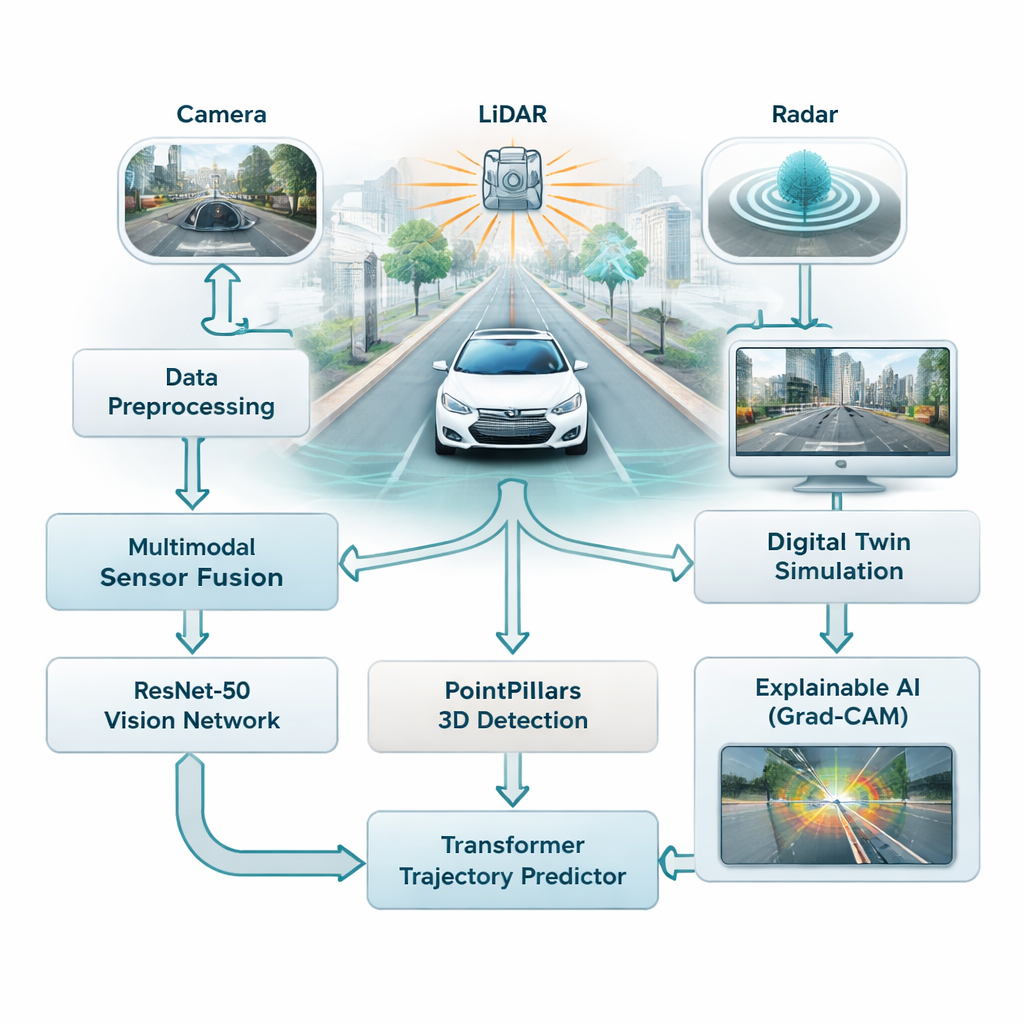
רוב מערכות סיוע הנהג כיום נסמכות בעיקר על מצלמות, שעובדות היטב באור טוב אך מתקשות בערפל, בגשם או בלילה. המחקר הזה משלב שלושה סוגי חיישנים — מצלמות, סורקי לייזר (LiDAR) וראדאר — כך שהרכב לא ייתקל בתלות במקור מידע יחיד ופורע. מצלמות מקנות צבעים ופרטים עשירים, LiDAR בונה תמונה תלת־ממדית מדויקת של הסצנה, וראדאר נשאר מהימן בתנאי מזג אוויר קשים. המחברים ממזגים את שלושת הזרמים הללו לתצוגה אחידה של התנועה, מה שמעניק לרכב הבנה מלאה ואמינה יותר של דרכים, הולכי רגל ורכבים אחרים.
ללמד את הרכב לזהות ולחזות
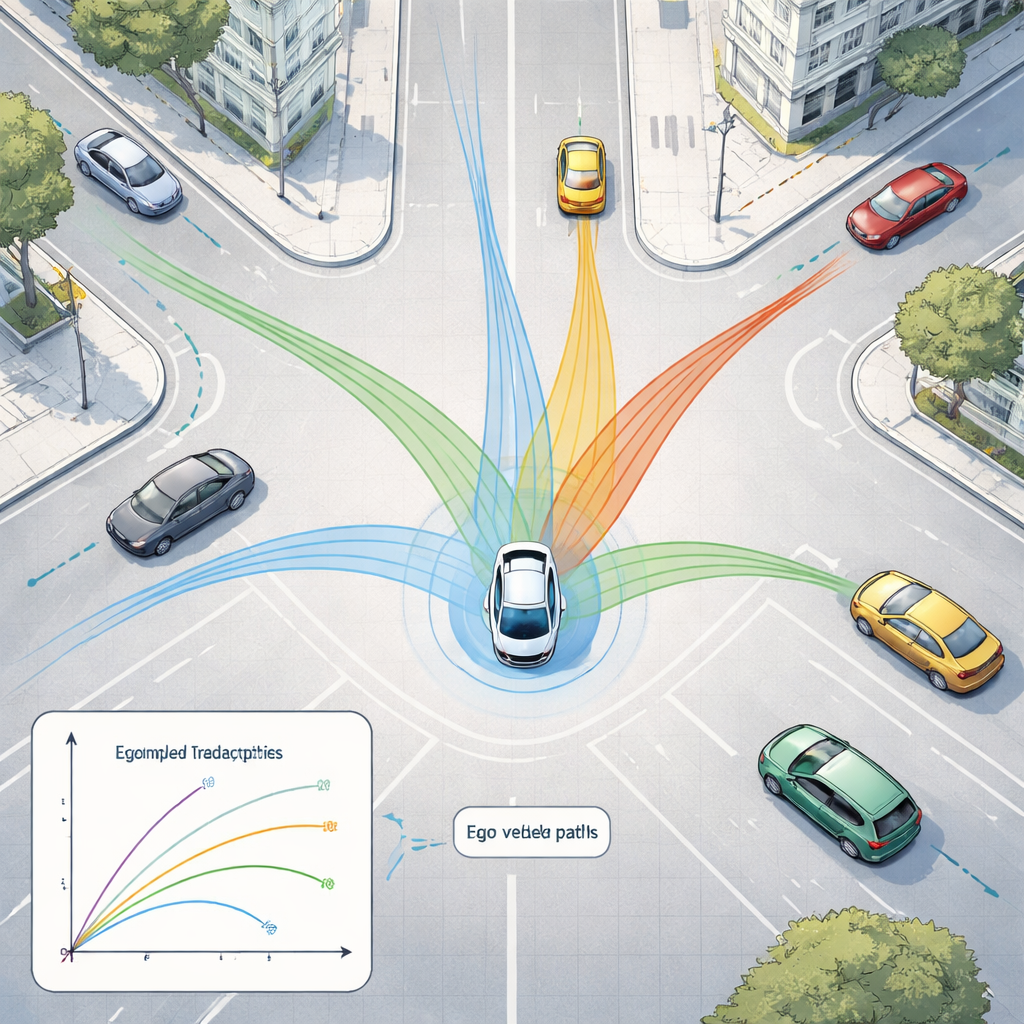
כדי לפענח את שפע הנתונים הזה, המסגרת משתמשת בשתי משפחות של מודלים מודרניים של בינה מלאכותית. ראשית, רשת תמונה עמוקה הנקראת ResNet-50 סורקת תמונות מצלמה כדי ללכוד את המצב הכללי — כמה הדרך צפופה, היכן ניתנות לראות נתיבי נסיעה, וכיצד הסצנה מסודרת. במקביל, מודל תלת־ממדי בשם PointPillars קורא ענני נקודות LiDAR כדי לאתר כלי רכב ועצמים אחרים במרחב תלת־ממדי. האותות הללו מוזנים לאחר מכן לטרנספורמר, סוג של בינה מלאכותית שתוכנן במקור לשפה, שמתבלט בהבנה של שינויים לאורך זמן. כאן הוא לומד לחזות כיצד רכבים סמוכים ועצמים נעים צפויים לזוז בשניות הקרובות, תוך התחשבות גם בתנועתם העברית וגם במבנה הדרך.
בניית מסלול בדיקה וירטואלי ובטוח
במקום לבדוק מצבים מסוכנים ישירות על כבישים ציבוריים, החוקרים מחברים את המערכת שלהם לתאום דיגיטלי — העתק וירטואלי של רחובות עיריים אמיתיים המבוסס על מאגר נתונים ציבורי גדול מבוסטון וסינגפור. בעולם המדומה הזה, חיישני הרכב, תנועתו וסביבתו משוחזרים ומותאמים כרצון, בעוד שהבינה המלאכותית מנסה לעקוב אחרי עצמים ולחזות את מסלולם העתידי. המערכת יכולה להריץ תרחישי "מה אם?" אלה בזמן אמת, עם זמני תגובה מתחת ל-50 מילישניות, המאפשרים למהנדסים לחקור מקרי קצה כמו בלימות פתאומיות, פניות חדות או צמתים צפופים מבלי לסכן אף אחד.
הביט לתוך "הקופסה השחורה" של ה-AI
ביקורת נפוצה על למידה עמוקה היא שקשה להבין מדוע המודל קיבל החלטה מסוימת. כדי להתמודד עם זאת, המחברים משתמשים בשיטה הנקראת Grad-CAM, שמדגישה את חלקי התמונה שהשפיעו ביותר על פלט המודל. מפות חום אלה מראות, למשל, האם הרשת מתמקדת ברכב אחר, בהולך רגל או בסימון נתיב בעת הערכת מסלולים. אף שהשלב ההסברתי הזה רץ לא מקוון ולא בלולאת הזמן‑אמת של הרכב, הוא מסייע למהנדסים ולמבקרי בטיחות לאמת שהמערכת משקיעה תשומת לב באותות הנכונים — דבר מכריע לבניית אמון ציבורי.
עד כמה זה משפר את הנהיגה?
כאשר נבחנה על מאות סצנות נהיגה עירוניות, המסגרת המוצעת זיהתה עצמים בתלת־ממד בדיוק וחזתה תנועה בדיוק רב יותר מאשר חוקים פיזיקליים פשוטים שמניחים מהירות קבועה או תאוצה יציבה. שגיאות החיזוי שלה — המרחק שבו עמדות החזוי חורגות מהמציאות — קטנות משמעותית מאלו של בסיסים כאלה וקרובות למודל חזק חוזר (recurrent), ובכל זאת המערכת רצה מספיק מהר לשימוש בזמן אמת. ניסויים זהירים שמשווים עיצובים שונים של רשתות מראים כי מודל תמונה עמוק יותר וגלאי תלת־ממדי בעומק בינוני משיגים את האיזון הטוב ביותר בין דיוק ומהירות, וכי ניתן לפרוס את המערכת על מחשבים קטנים ברכב לאחר דחיסת המודל.
מה המשמעות עבור הנהגים היומיומיים
באופן כללי, המסר עבור לא‑מומחים הוא שמכוניות אוטונומיות בטוחות ואמינות יותר צפויות לנבוע מגישה שמשלבת חיישנים מרובים, חיזוי של התפתחות הסצנה ובדיקה מקיפה בעולמות וירטואליים מציאותיים. על ידי חיבור תפיסה, חיזוי, סימולציה והסברים מובנים לאדם בעיצוב אחד, עבודה זו מקרבת את הרכבים האוטונומיים להתנהגות של שותפים זהירים ושקופים על הכביש במקום להיות מכונות מסתוריות.
ציטוט: Almadhor, A., Al Hejaili, A., Alsubai, S. et al. A multimodal learning and simulation approach for perception in autonomous driving systems. Sci Rep 16, 5505 (2026). https://doi.org/10.1038/s41598-026-35095-3
מילות מפתח: נהיגה אוטונומית, מיזוג חיישנים, חיזוי מסלולים, זיהוי עצמים בתלת־ממד, סימולציית תאום דיגיטלי