Clear Sky Science · he
מיקום נקודות צמיחה של צמחים באמצעות האניית פרייר על בסיס אפוקים
עקירת עשבים חכמה יותר לעולם רעב
במלאת האוכלוסייה העולמית, החקלאים לחוצים לייצר יותר מזון תוך שימוש בפחות כימיקלים ובשמירה על הסביבה. אתגר מרכזי הוא להיפטר מעשבים מבלי לפגוע בגידולים יקרי ערך. מאמר זה מציג אסטרטגיית אימון בינה מלאכותית חדשה המסייעת למכונות לאתר בדיוק היכן הצמחים גדלים — נקודות הצמיחה שלהם — כך שכלים כמו מעקרי עשבים בלייזר או חשמל יוכלו לכוון את פעולתם בדיוק רב ולהשאיר את הגידולים שלמים.
מדוע נקודות צמיחה חשובות
עשבים שוטים גוזלים מהגידולים אור שמש, מים וחומרי הזנה, מה שמפחית תוצרת ומאיים על ביטחון המזון. חקלאים מסתמכים לעיתים על קוטלי עשבים, אך שימוש יתר מעלה חששות בריאותיים, זיהום ופיתוח עמידות בעשבים. טכניקות חדשות כגון עישון, חשמל ועקירה בלייזר מבטיחות שליטה נקייה יותר על ידי השמדה מכנית או באמצעות קרני אנרגיה. כדי לפעול בבטחה, מערכות אלו חייבות להבדיל בין גידולים ועשבים ואז לאתר את נקודות הצמיחה הקטנות — לעיתים בצמתים של הגבעולים — שבהן פגיעה היא היעילה ביותר. כלים רבים של ראייה ממוחשבת יכולים לזהות צמחים שלמים, אך מתקשים למצוא מטרות קטנות אלו בדיוק ובמהירות הנדרשים לשימוש בזמן אמת בשדה.
הפיכת רמזי צבע פשוטים להנחיה חזקה
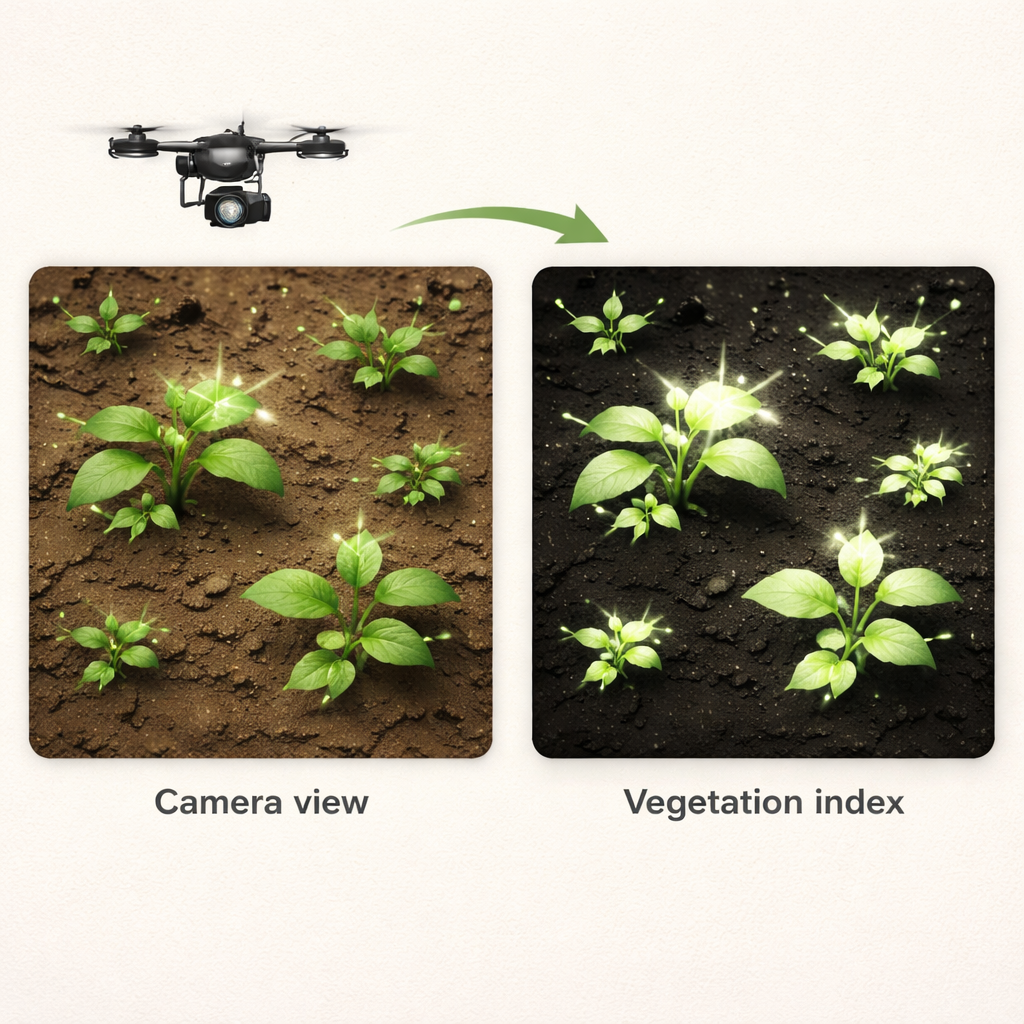
החוקרים מבססים את שיטתם על רעיון פשוט: צמחים ירוקים נראים שונים מעפר חום בתמונות צבע רגילות. נוסחה ידועה של אינדקס צמחייה, הנקראת ExG-ExR, משקללת את ערכי האדום, הירוק והכחול של כל פיקסל כך שפיקסלים של צמח בולטים כבוהקים ואילו פיקסלים של אדמה נראים כהים. אינדקס זה ניתן לחישוב מכל מצלמה סטנדרטית ללא חיישנים נוספים. במערכת החדשה, אינדקס הצמחייה נוסף לערוצי הצבע הרגילים ככניסה רביעית לגלאי בינה מלאכותית פופולרי הידוע כ‑YOLO‑Pose. תצוגה ארבע‑ערוצית זו נותנת למודל תמונה ברורה יותר של מיקום הצמחים, ועוזרת לו להתרכז באזורים הנכונים כאשר הוא מחפש נקודות צמיחה.
ללמד את הבינה המלאכותית מהקל לקשה
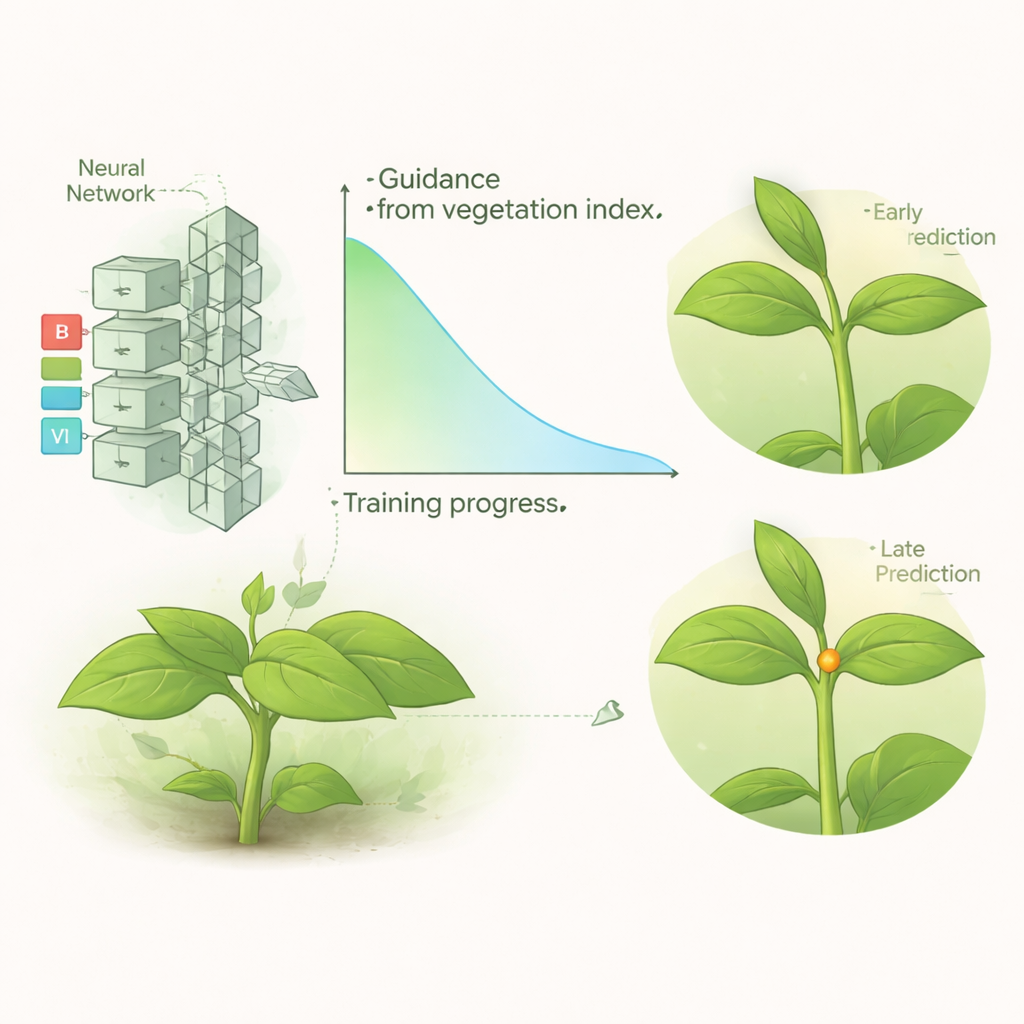
מתן מידע נוסף בלבד אינו מספיק; המודל גם צריך ללמוד להשתמש בו. הצוות מציג אסטרטגיית "האניית פרייר על בסיס אפוקים" (epoch‑based prior annealing, EPA), בהשראת אופן הלמידה האנושי. בתחילת האימון, המודל מונחה בחוזקה לשמור על נקודות הצמיחה החזויות בתוך אזורי צמחייה, באמצעות אינדקס הצמחייה כמסנן. אם הוא ממקם נקודה בעפר, האלגוריתם מטיל עונש כבד יותר; אם הנקודה נמצאת בפיקסלים של צמח, העונש קל יותר. ככל שהאימון מתקדם, הנחיה זו מופחתת בהדרגה לפי לוח חלק, מה שמאפשר למודל להישען פחות על רמז הצבע הגס ויותר על הדפוסים הוויזואליים המדויקים שלמד. בסיום האימון, הבינה כבר אינה מונחית תמיד אל הפיקסלים הכי ירוקים — שעשויים שלא להיות נקודות הצמיחה האמיתיות — אלא מכווננת את המיקומים בעצמה.
הוכחת הרעיון בשדות אמיתיים
כדי לבדוק את הגישה, המחברים אימנו מודלים על שני מאגרי תמונות שדה מעולם האמיתי המכילים אלפי תמונות עם כמה מיני גידולים וריבוי סוגי עשבים. הם השוו גרסאות של YOLO‑Pose עם ובלי ערוץ הצמחייה הנוסף וכן עם ואנשי EPA. הוספת אינדקס הצמחייה לבדה נתנה שיפורים צנועים, אך שילובו עם EPA הוביל לשיפורים ברורים בדיוק זיהוי נקודות הצמיחה — כ‑2.4 נקודות אחוז בניקוד זיהוי סטנדרטי — מבלי לפגוע ביכולת המודל להקיף צמחים בתיבות. העיבוד הנוסף היה זניח (פחות מחצי אחוז מהעלות הכוללת), מה שהופך את השיטה מתאימה לרובוטים חקלאיים בעלי משאבים מוגבלים. בדיקות בתנאי תאורה שונים, רמות לחות אדמה שונות ואפילו גרסאות שונות של מודל YOLO הראו שהאסטרטגיה שימושית באופן רחב, אם כי רגישותה משתנה לפי עוצמת ומהות ההנחיה המקדימה וזמן השימוש בה.
מה המשמעות לזה עבור החקלאות העתידית
ללא מומחיות מיוחדת, המסקנה המרכזית היא ששינוי קטן באופן שבו אנו מאמנים בינה מלאכותית — שימוש ברמז צבע פשוט בתחילה ואז שחרור הדרגתי של השליטה — יכול לשפר באופן משמעותי את יכולת המכונות למצוא את הנקודות המדויקות בצמחים שבהן פעולה משנה תוצאות. שיפור זה במיקום נקודות הצמיחה יכול לסייע לרובוטים לעקור עשבים בעזרת פולסים חשמליים או קרן לייזר בדיוק רב, תוך שמירה על הגידולים, הפחתת שימוש בקוטלי עשבים והשפעה סביבתית נמוכה יותר. אסטרטגיה דומה ניתנת להסתגלות לסוגי אותות צמחיים ומודלים אחרים של בינה מלאכותית, ופותחת פתח למערכות ראייה חכמות ואמינות יותר התומכות בחקלאות בת‑קיימא ובחקלאות מדויקת.
ציטוט: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
מילות מפתח: חקלאות מדויקת, בקרה על עשבים שוטים, ראייה ממוחשבת, למידה עמוקה, נקודות צמיחה של צמחים