Clear Sky Science · he
פילוח עצמים תת‑מימי מדויק בזמן אמת באמצעות YOLOv11‑UOS משופר בתחומי מכפלה עם שיפור אדפטיבי מונחה פיזיקה והגברה מבוססת תשומת לב
צלילה לעומק עם עיניים דיגיטליות חדות יותר
האוקיינוסים שלנו נחקרים יותר ויותר לא רק על‑ידי צוללנים וצוללות, אלא גם על‑ידי מצלמות חכמות הנשאות על רובוטים תת‑מימיים. מצלמות אלה מסייעות בחיפוש אחר ספינות טרופות, בבדיקת צינורות ימיים ובניטור שוניות אלמוגים ואוכלוסיות דגים. עם זאת, תמונות תת‑מימיות רבות מטושטשות, בעלות גוון תכלת‑ירקרק ושפע רעשי חזות, מה שמקשה על זיהוי עצמים גם על ידי בני אדם — ולא נדבר על מחשבים. המאמר מציג מערכת ראייה ממוחשבת חדשה שמנקה תמונות תת‑מימיות ואז מזהה ומקיפה עצמים בהן, במהירות מספקת להנעת משימות רובוטיות בזמן אמת.
למה הראייה מתחת למים כה קשה
האור מתנהג שונה במים מאשר באוויר. ככל שאור השמש נסוג כלפי מטה, גווני האדום נעלמים ראשונים, אחריהם הירוקים, ומשאירים גוון תכלתי וסצנות בעלות ניגוד נמוך. חלקיקים זעירים במים מפזרים את האור ויוצרים ערפל שמטשטש קצוות ומסתיר פרטים קטנים. תוכנות גילוי מסורתיות, ואפילו מודלים עמוקים מודרניים, מתקשות עם תמונות מעוותות אלה: דגים מתמזגים עם אלמוגים, מבנים מלאכותיים נעלמים מהרקע וסצנות חשוכות הופכות כמעט בלתי‑קריאות. מחקרים קודמים בדרך כלל התייחסו או לניקוי תמונה או לזיהוי עצמים בלבד, מה שהשאיר מערכות סופיות לעתים איטיות מדי, שבירות או עיוורות עדיין במים מאד עכורים.
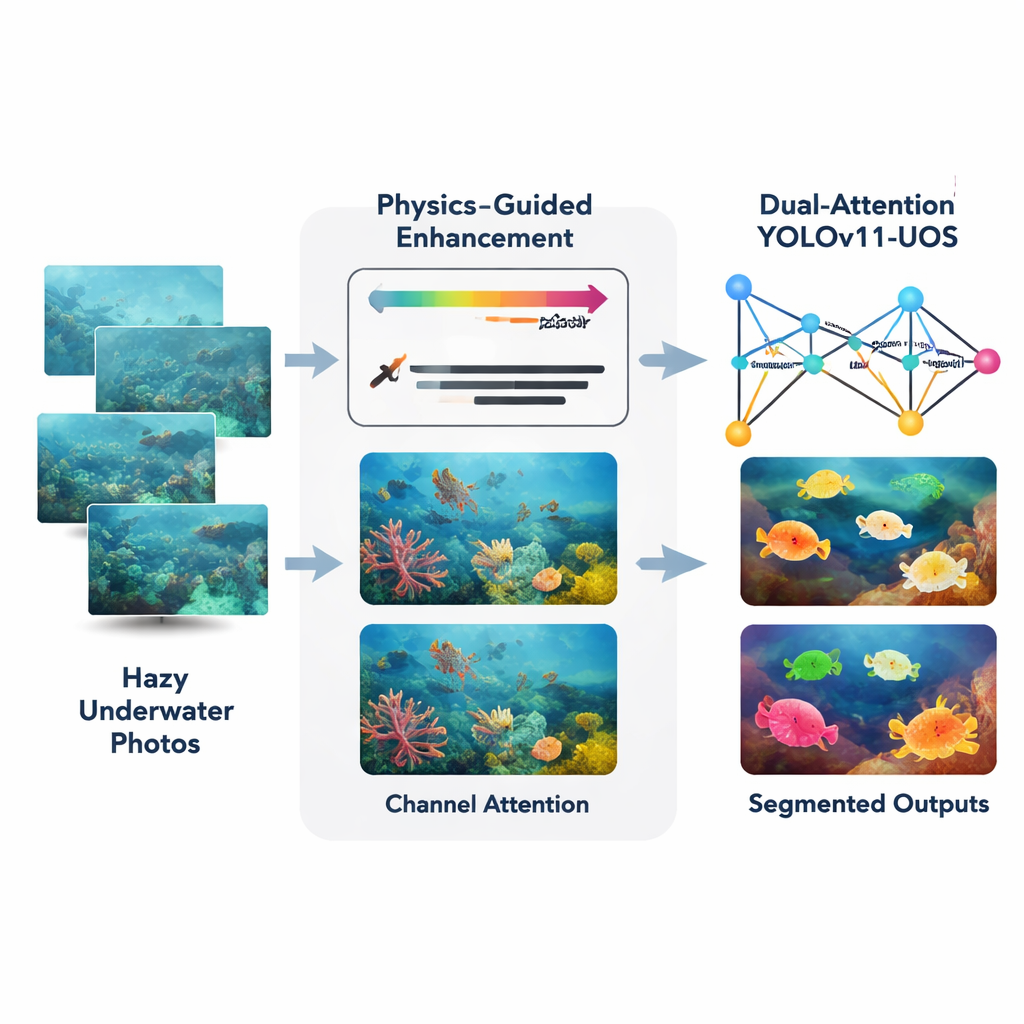
אסטרטגיה בעלת שני שלבים: לנקות קודם, ואז להתמקד
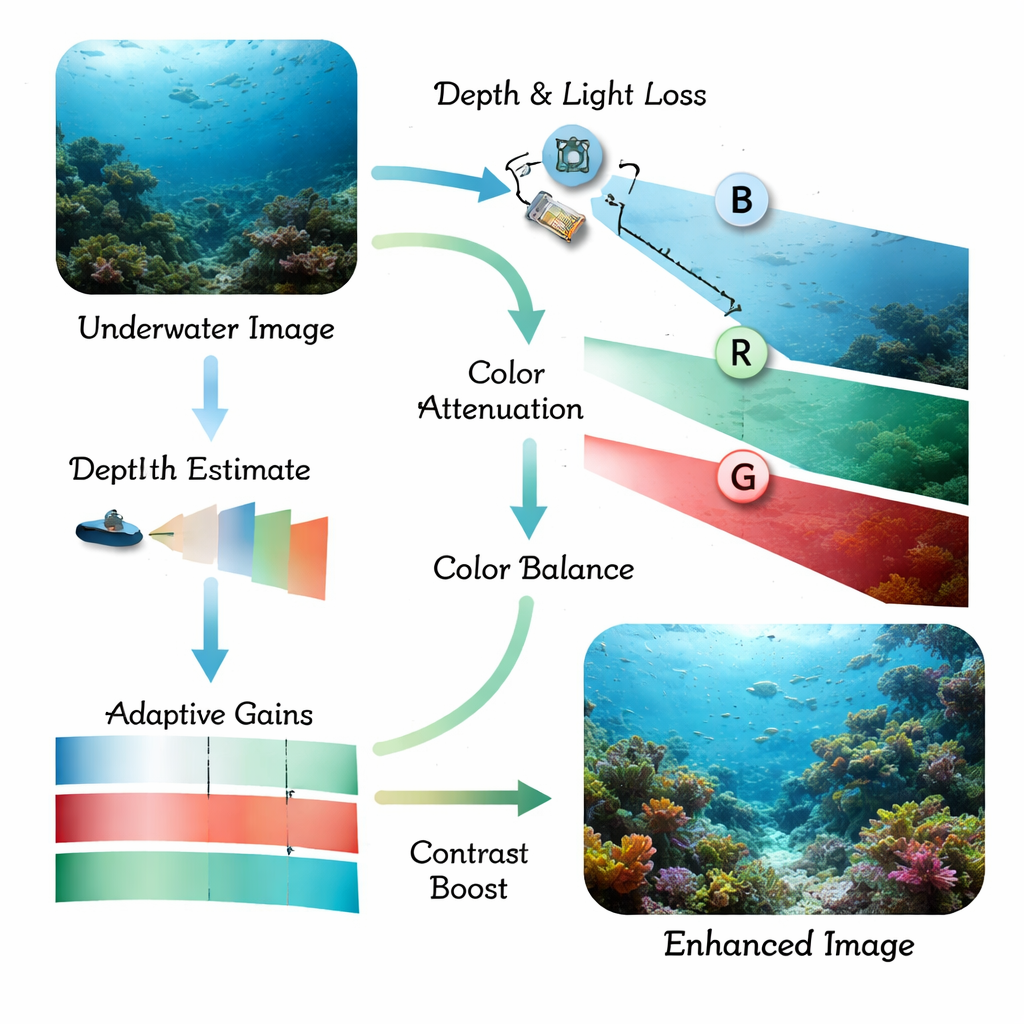
המחברים מציעים גישה משולבת הבנויה סביב זיהוי בזמן אמת עדכני בשם YOLOv11, המותאמת כאן לסצנות תת‑מימיות ולפילוח מופעים (שרטוט מתאר מדויק לכל עצם). תחילה מודול חזיתי הנקרא Adaptive Physics‑Guided Enhancement מקבל תמונות גולמיות תת‑מימיות ומתאים אותן באמצעות מודל פיזיקלי מפושט של ספיגת ופיזור האור במים. המודול מעריך את מרחק כל חלק בסצנה מהמצלמה ואז מפצה על אובדן חזק יותר של האור האדום ביחס לירוק ולכחול. זה משחזר צבעים טבעיים יותר ומגביר ניגוד מקומי, בעוד שלב מבוסס היסטוגרמה מחודד מחדד קצוות מבלי להגביר רעש, גם באזורים חשוכים או עכורים.
ללמד את הרשת היכן להסתכל
לאחר שהתמונה עובדה, היא מועברת לחוט שדרה משודרג של YOLOv11 שהותקן בו מנגנוני תשומת לב. מודולים אלה מתנהגים במידה מסוימת כמו זרקור ומסנן צבע. תשומת לב מרחבית מכוונת את הרשת להעניק חשיבות לאזורים משמעותיים — כגון מתאר דג או קצה חפץ שקוע — ולהתעלם מהרקע המסיח כגון חול או צמחים מתנודדים. תשומת לב על‑ערוצית מכוונת את עוצמת המשקל שניתנת לתבניות צבע וטקסטורה שונות, כך שאותות חזותיים מועילים מודגשים בעוד שאחרים מדוכאים. יחד, שני שלבי התשומת לב הללו מסייעים לרשת לבנות ייצוגים פנימיים חדים יותר לפני קבלת ההחלטה היכן נמצאים עצמים ומה הם.
מבחנים באוקיינוסים אמיתיים ותנאים קשים
כדי להעריך את יעילות המערכת בפועל, החוקרים אימנו ובחנו אותה על כמה מאגרי תמונות תת‑מימיות ציבוריים וכן על מאגר מותאם חדש של מעל 7,000 תמונות מתויגות בקפידה ממים חופיים בעומקים ובעכירות משתנים. הם מדדו מדדי גילוי ופילוח סטנדרטיים והשוו את שיטתם למודלים מקובלים כגון U‑Net, DeepLab, ממפי פילוח מבוססי טרנספורמר ולמערכת YOLOv11 בסיסית ללא המודולים החדשים. העיצוב המשולב של שיפור‑פלוס‑תשומת‑לב שיפר את דיוק הגילוי הממוצע בכ‑6.5 נקודות אחוז על פני ה‑YOLOv11 הבסיסי, עם מתארי עצמים נקיים יותר ופחות פריטים שנחמצו או זוהו בטעות. חשוב מזה, המערכת עדיין פועלת בכ‑38 מסגרות לשנייה על מעבד גרפי מודרני, מהירות מספקת לשימוש בקירוב בזמן אמת על פלטפורמות רובוטיות.
מה המשמעות עבור רובוטים ימיים ומחקר
במילים פשוטות, המחקר מראה ששיפורים חכמים בקדם‑עיבוד ותשומת לב ממוקדת מאפשרים למחשבים "לראות" טוב יותר הרבה מתחת למים. על‑ידי ביטול חלק מהשפעות הפיזיקליות שמרוסקות תמונות תת‑מימיות ובהמשך הנחיית רשת הזיהוי להתרכז באזורים ובגוונים המידעיים ביותר, השיטה מספקת מתארים חדות ומהימנים יותר של דגים, אלמוגים ומבנים מלאכותיים. הדבר יכול לסייע לרכבים תת‑מימיים אוטונומיים לנווט בבטחה, לנטר מערכות אקולוגיות ימיות עדינות ולבצע בדיקה של תשתיות תת‑ימיות קריטיות ללא השגחה אנושית. עדיין קיימות אתגרים במים עכורים מאד או בסצנות עמוקות שבהן חסר כמעט כל אור אדום, אך המסגרת מהווה צעד מעשי לכיוונן של ראייה תת‑מימית חזקה בזמן אמת התומכת ביצירת מפות תלת‑ממדיות ובחקר רב‑חושי עתידי של האוקיינוס.
ציטוט: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. An accurate realtime underwater object segmentation using improved dual-domain YOLOv11-UOS with physics guided adaptive enhancement and attention-boosting. Sci Rep 16, 4804 (2026). https://doi.org/10.1038/s41598-026-35001-x
מילות מפתח: ראייה תת‑מימית, רובוטיקה ימיית, שיפור תמונה, פילוח עצמים, ראייה ממוחשבת