Clear Sky Science · he
שיטת כיול אקסטרינזית LiDAR–מצלמה לטווח ארוך לתחבורה במסילות
שמירה על בטיחות הרכבות מרחוק
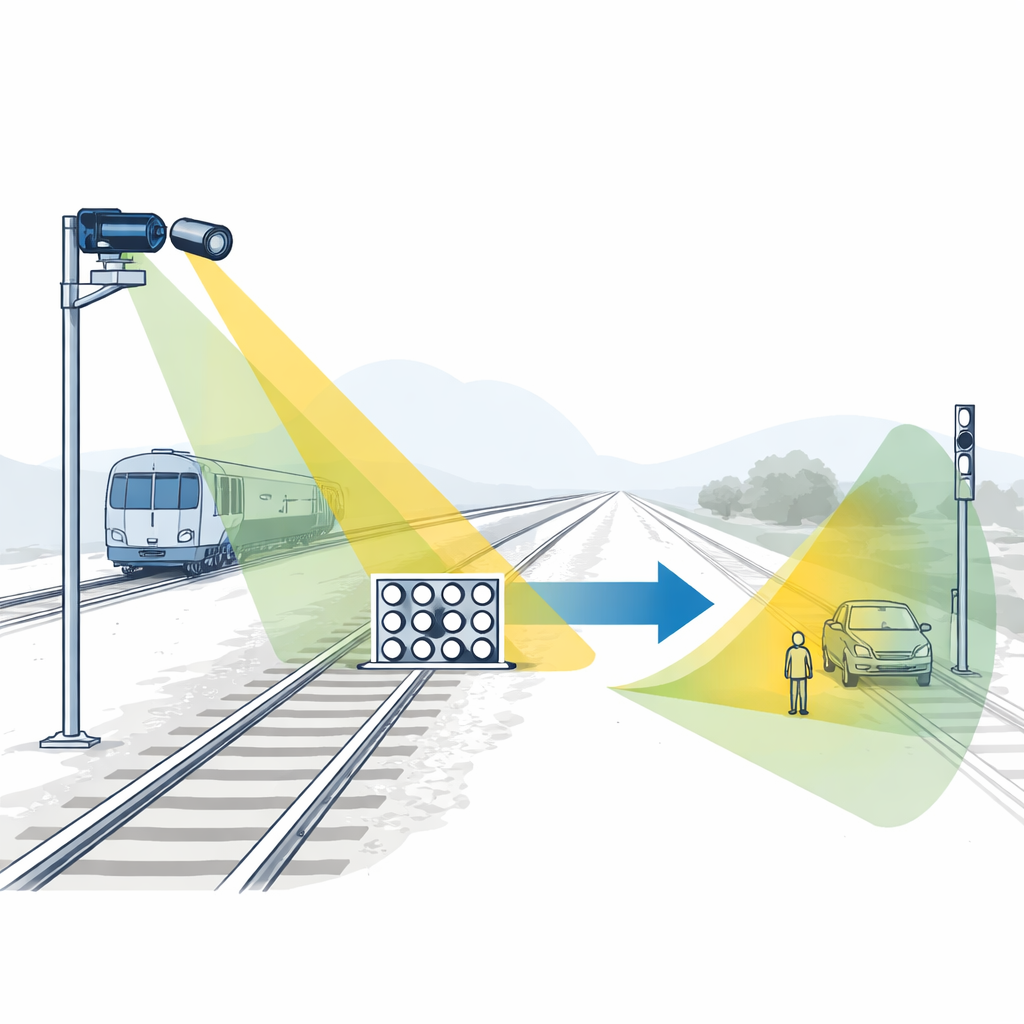
רכבות מודרניות ללא נהג סומכות על "עיניים" אלקטרוניות שמנטרות את המסילה לגבי מכשולים עוד לפני שאדם יכול לראותם. שתי ה"עיניים" החשובות הן מצלמות וסורקי לייזר הנקראים LiDAR, שמרגישים את העולם בדרכים שונות. כדי לפעול יחד הן חייבות להיות מיושרות בדיוק רב, משימה שמסתבכת במיוחד כאשר הצפייה נמשכת למרחקים של מאות מטרים. מחקר זה מציג שיטה חדשה ליישור החיישנים כך שיוכלו להגן באופן מהימן על מערכות מסילות בטווח ארוך.
מדוע יישור חיישנים חשוב
ברכבת אוטונומית מצלמות לוכדות תמונות צבע מפורטות בעוד LiDAR מודד מרחק על ידי שיגור דפיקות אור ומדידת זמן החזרה. מיזוג שתי התצפיות מאפשר למערכת לזהות ולעקוב אחרי עצמים שעשויים לחסום את נתיב המסילה, ממכונית תקועה במעבר דרך ועד שברי דרך על הפסים. אך מיזוג עובד רק אם המערכת יודעת בדיוק כיצד המצלמה וה‑LiDAR ממוקמים זה ביחס לזה. חוסר יישור קטן יכול להזיז מכשול שזוהה בעשרות סנטימטרים — או אפילו מטרים — במרחקים גדולים, מה שעלול להאט או להפחית את אמינות מערכות ההגנה האוטומטיות.
האתגר של ראיית מרחקים ארוכים
ביישומי מסילות מהנדסים משתמשים לעתים קרובות בעדשות טלה כדי שהמצלמה תוכל לראות בבירור עצמים במאות מטרים. בטווחים האלה, עם זאת, החזרות ה‑LiDAR מכל יעדי כיול הופכות למפוזרות מאוד: רק כמה נקודות לייזר נוחתות על הלוח המשמש ליישור החיישנים. רוב טכניקות היישור הקיימות מניחות ענן נקודות צפוף או קצוות עשירים בסצנה — תנאים שאינם מתקיימים בטווחים ארוכים. כתוצאה מכך קשה למצוא מאפיינים תואמים בין התמונה הדו־ממדית לענן הנקודות התלת־ממדי בדיוק מספיק לתמוך בשליטה בטוחה ברכבת.
לוח כיול חכם יותר
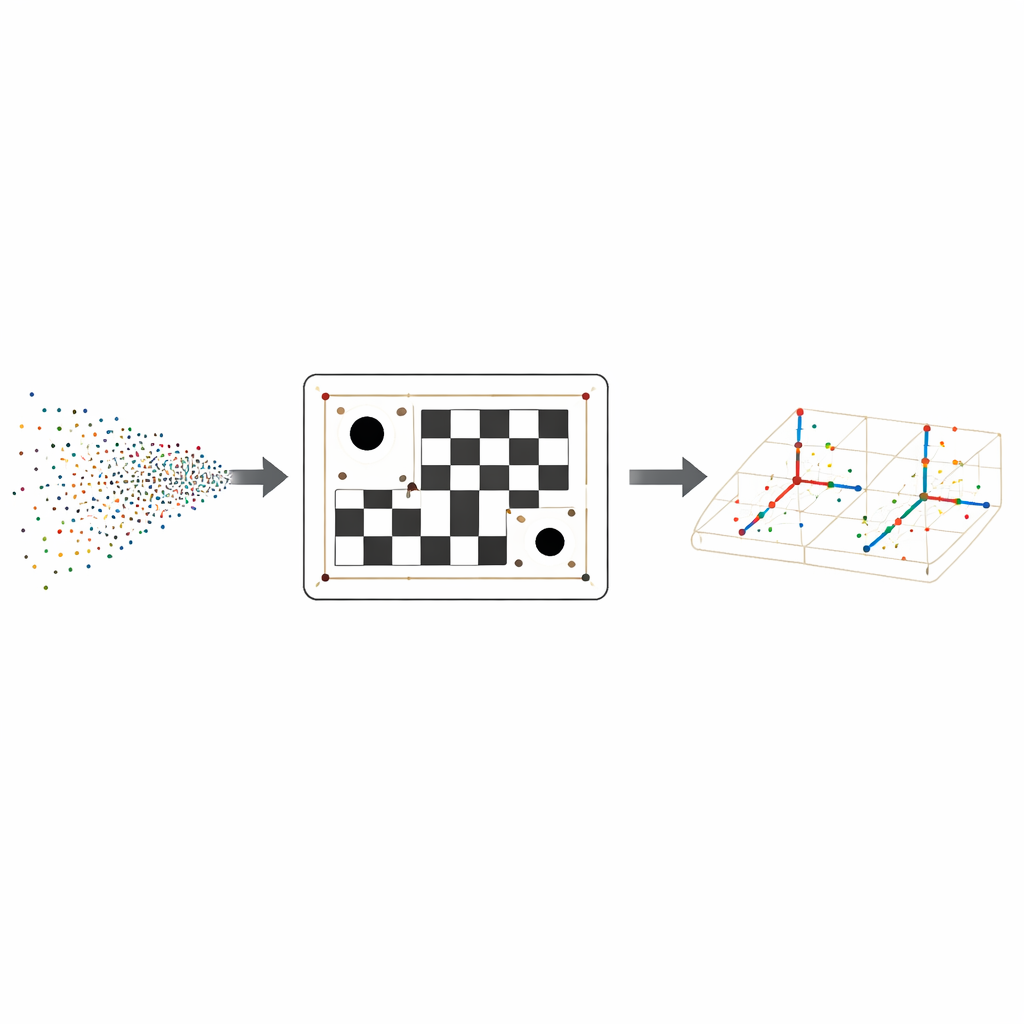
כדי להתגבר על הבעיה, הכותבים מעצבים לוח כיול מיוחד המשלב דוגמת שחור‑לבן מוכרת של משבצות עם שלושה חורים מעוגלים שמרכזיהם יוצרים משולש לא סימטרי. דוגמת המשבצות מספקת נקודות פינה מדויקות רבות בתמונת המצלמה, בעוד שהחורים יוצרים רמזים גיאומטריים חזקים ל‑LiDAR, שיכול לזהות בקלות את קצוות המעגל אפילו מרחוק. מכיוון שהחורים ממוקמים במשולש אסימטרי, ניתן לקבוע באופן חד־משמעי את כיוון הלוח במרחב, ובכך להימנע מבלבול שנובע משיקוף או סיבוב של התצוגה.
הפיכת נקודות מפוזרות להתאמות אמינות
מצד ה‑LiDAR השיטה מנקה תחילה את ענן הנקודות ומתאימה מישור שטוח המייצג את הלוח. לאחר מכן היא מקרינה את הנקודות על המישור ומשתמשת בהליך התאמת מעגלים רובוסטי כדי למצוא את מרכז כל חור, ומשכללת את מקומן על ידי אכיפת המרחקים הפיזיים הידועים בין החורים. כאשר משולש מרכזי החורים נקבע, האלגוריתם בונה רשת קואורדינטות מקומית על פני הלוח, חוזה היכן אמורות להימצא כל פינות המשבצות בתלת־ממד, ובודק נקודות LiDAR סמוכות לגבי ערכי הבהירות, או הרפלקטיביות, הנכונים. שילוב זה של גיאומטריה ורפלקטיביות הופך מספר קטן של החזרות מפוזרות לסט אמין של מיקומי פינות תלת־ממדיים התואמים לפינות הדו־ממדיות של המצלמה.
כיוונון מדויק של יחס החיישנים
כאשר אותן פינות פיזיות מזוהות הן בתמונת המצלמה והן בענן ה‑LiDAR, המחברים פותרים עבור הסיבוב והתזוזה המדויקים שמקשרים בין שני החיישנים. הם משתמשים בטכניקת אופטימיזציה איטרטיבית שמכווצת שוב ושוב את הפער בין המקום שבו נקודות ה‑LiDAR נופלות בתמונה לבין המקום שבו המצלמה רואה למעשה את הפינות. ניסויים בפלטפורמת מסילה אמיתית, עם עדשות מצלמה שונות מטווח בינוני ועד טלפוטו חזק, מראים שהשיטה החדשה שומרת בעקביות על שגיאות הקרנה של בערך פיקסל אחד או פחות, ומצטיינת על פני מספר אלטרנטיבות ידועות במיוחד באורכי מוקד הארוכים ביותר שבהם הנתונים נדירים ביותר.
מה משמעות הדבר לבטיחות במסילות
במונחים יום־יומיים, המחקר מציע דרך אמינה יותר לומר למצלמה ול‑LiDAR ברכבת אוטונומית, "אתם כאן ומסתכלים בדיוק לכיוון הזה." על ידי עיצוב מחדש של לוח הכיול והוספת עיבוד חכם לנתוני LiDAR מפוזרים, השיטה שומרת על דיוק גבוה גם כאשר החיישנים צופים בסצנות במאות מטרים. יישור הדוק יותר זה מאפשר למערכת המאוחדת למקם מכשולים בדיוק רב יותר במרחב התלת־ממדי, ומחזק את הבסיס הטכנולוגי לבטיחות גבוהה יותר בתחבורה במסילות ולתפיסה מולטי־חיישנית אמינה יותר במציאות.
ציטוט: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
מילות מפתח: בטיחות תחבורה במסילות, מיזוג LiDAR ומצלמה, כיול חיישנים, רכבות אוטונומיות, תפיסה לטווח ארוך