Clear Sky Science · he
שחזור תלת־ממדי של מבנים בים רדוד באמצעות כיול ישיר של המערכת וחילוץ קו לייזר חלש
להראות עולמות תת־מימיים נסתרים
רבים מהעקבות המרתקות ביותר של עברנו נמצאים כיום מתחת לפני המים — אוניות טרופות, ערים שטובעו ושרידים חופיים. כדי לחקור ולשמר אתרים אלה באופן דיגיטלי, חוקרים זקוקים למפות תלת־ממד מדויקות של מה שמונח על קרקעית הים. עם זאת, במים רדודים, אור שמש חזק, חול צף והמים עצמם מקשים מאוד על מדידות מדויקות. מאמר זה מציג שיטה חדשה לסריקה ושחזור דגמי תלת־ממד מפורטים של מבנים תת־מימיים באמצעות לייזר כחול בעל הספק נמוך, גם בתנאי אור שמש ורעש חזותי שבהם שיטות קיימות נכשלות ברובן.
מדוע סריקת ימים רדודים כל כך קשה
יצירת דגם דיגיטלי תלת־ממדי של סצנה בדרך כלל פירושה הרכבת מיליוני נקודות בחלל — מה שמדענים מכנים ענן נקודות. על היבשה, לייזרים ומצלמות מבצעים זאת באמינות. מתחת למים, לעומת זאת, הדברים מסתבכים. המים מעקמים ומתפזרים האור, מציפים סצנות בערפול כחול‑ירקרק וממטשטשים קצוות. אור שמש החודר דרך גלים יוצר דפוסים מוארים ונעים הנקראים קאוסטיקות, שיכולים לטשטש את קו הלייזר הדק והחלש. חלקיקים מיקרוסקופיים מוסיפים וילון ערפל והשתקפויות מזוהמות. בתוצאה, מערכות תת־מימיות רבות כיום פועלות רק בלילה, בתנאי תאורה נמוכה מאוד או בתנאים מבוקרים בקפידה — וזה לא משקף את אופן הפעולה של הים האמיתי.
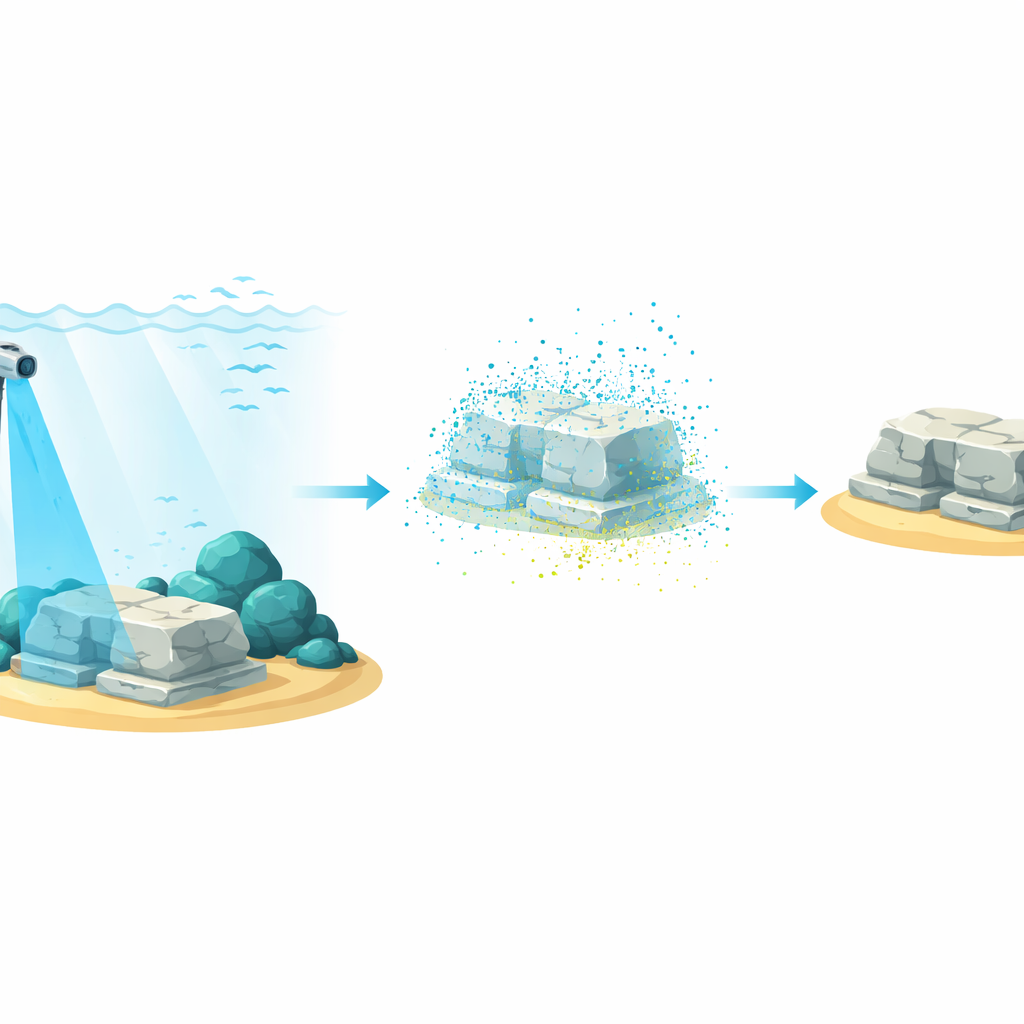
לייזר כחול מסתובב כמברשת תלת־ממדית
המחברים בנו סורק קומפקטי ואיטום למים המתנהג כמו מברשת תלת־ממד. הוא מקרין גיליון דק וקטוריאלי של אור לייזר כחול שמסתובב כשהזרוע של המכשיר מסתובבת לאט. בכל מקום שבו גיליון זה פוגע בסלע, קיר או חפץ, הוא מותיר עקבה זוהרת. מצלמה הממוקמת לצד הלייזר לוכדת תמונות בכל צעד סיבוב קטן. באמצעות שילוב כל סוגי הצפיות האלה, המערכת יכולה לשחזר ענן נקודות תלת־ממדי צפוף של הסביבה, כולל צבע משוער, שניתן לאחר מכן להפוך למשטח לצורך תצוגה או מציאות מדומה.
להראות למערכת היכן כל פיקסל שוכן בחלל
אתגר מרכזי במערכות מסוג זה הוא כיול: לקבוע כיצד כל פיקסל במצלמה מתיישב עם קואורדינטות בעולם האמיתי. שיטות מסורתיות נשענות על מודלים מתמטיים מפורטים של המצלמה והמים, עם עשרות פרמטרים שצריך לכוונן, מה שהופך אותן לפגיעות ושנויות בטעות. כאן, החוקרים בוחרים בגישה מבוססת נתונים. הם לומדים ישירות מיפוי מפיקסלי תמונה למיקומים תלת־ממדיים על־ידי סריקה של קיר המכוסה גריד ידוע. מספיקים כמה מאות נקודות דגימה שנבחרו בקפידה. לאחר שמאוחסן בטבלת חיפוש, המפה הזו מאפשרת לסורק להמיר כל פיקסל לייזר מזוהה לנקודה תלת־ממדית מבלי לפתור במפורש משוואות מצלמה מסובכות.
יישור והגברה של עקבה כחולה חלשה
מאחר שהכיול נעשה באוויר, קטעי וידאו תת־מימיים חייבים קודם כל להיות "ממוּצָרִים" כדי לבטל את העיוות שנגרם על‑ידי השבירה בממשק אוויר‑מים. הצוות מודד את העיוות הזה בעזרת תמונות של רשת שהשתרעה על פני אוויר ומים, ואז מחשב כיצד כל פיקסל תת־מימי יזוז אילו היה נראה באוויר. לאחר הדי־וורפינג הזה, הטריק האמיתי מתחיל: מציאת קו כחול חלש לעתים קרובות שבור בתמונה רעשית. השיטה הראשונה מחשבת ערך "כחוליות" לכל פיקסל, מותאם כך שאור הקרוב לגוון הכחול של הלייזר בולט. לאחר מכן נבחן עד כמה כל פיקסל כחול יותר מאשר שכניו ומשתמשים בממיין למידת מכונה כדי ליצור מפה שחור‑לבן גסה של פיקסלים שכנראה שייכים ללייזר.
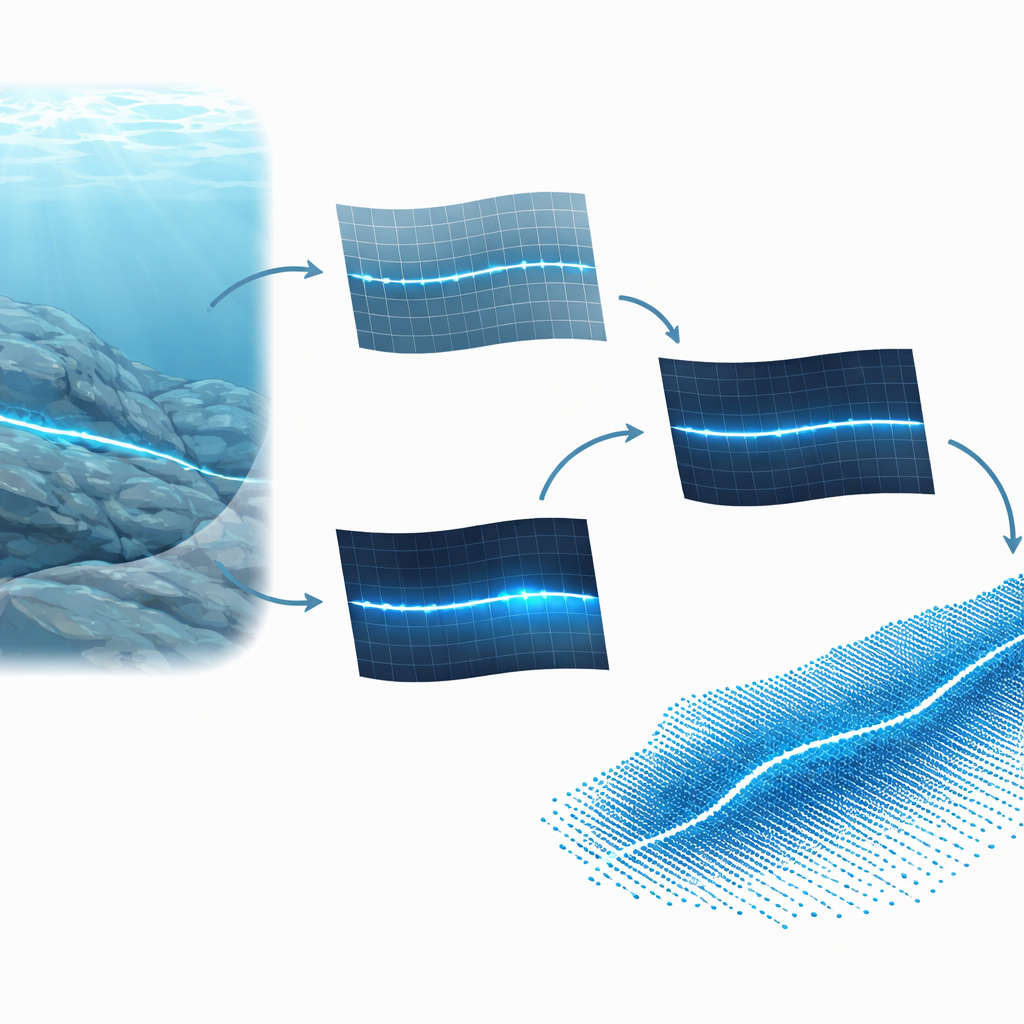
מן נקודות רעשיות לצורות תלת־ממד נקיות
המפה הראשונה הזו עדיין מכילה פגיעות שגויות רבות החל מחול, השתקפויות וקאוסטיקות. כדי לנקותה, המערכת מחפשת תבניות קו ישר באמצעות טכניקה קלאסית שמצביעה לטורים אפשריים על סמך מיקומי הפיקסלים. נשמרים רק אותם קווים שמתאימים לכיוון המצופה של הלייזר. לאחר מכן מותאמת עקומה חלקה דרך הנקודות הנותרות, ו"הביטחון" של כל פיקסל מוגבר אם הוא קרוב לעקומה הזו ובעל כחוליות חזקה. עבור כל שורה בתמונה, הפיקסל בעל הביטחון הגבוה ביותר נבחר כחלק מעקבת הלייזר הסופית. הזנת העקבות המסוננות הללו, שלב אחר שלב, לטבלת הכיול מייצרת ענן נקודות תלת־ממדי בצבע שנלקח מתמונת המצלמה המקורית.
כמה טוב זה עובד במים אמיתיים?
המחברים בדקו את המערכת במיכלים ובים רדוד בעומק של כחמישה מטרים, בתנאי תאורה שנעו מרמות פנימיות עמומות עד לאור חזק של לפני צהריים בעוצמות של עשרות אלפי לוקס. הם סרקו חפצים בעלי ממדים ידועים במדויק — כדור וצורה אקרילית מותאמת — והשוו גדלים מדודים לאמת הקרקע. במרחקים עד בערך חצי מטר, השגיאה הטיפוסית נשארה מתחת לשבר של מילימטר גם בתאורה חזקה, ונשמרה בתוך כמה עשיריות המילימטר במרחקים גדולים יותר עד שקו הלייזר הפך כמעט לבלתי‑נראה לעין. שיטות קיימות שתוכננו לתנאי חושך לא יכלו לשחזר סצנות ברמות תאורה גבוהות אלה כלל.
מה משמעות הדבר לחקר אתרים תת־מימיים
בעיקרו של דבר, עבודה זו מראה שמיפוי תלת־ממדי מדויק של מבנים תת־מימיים רדודים אינו דורש לייזרים גדולים בעלי הספק גבוה או חושך מושלם מבוקר. על‑ידי תיקון מדוקדק של שבירת האור במים, הדגשת צבע הלייזר ושימוש בכיול ישיר שמקשר פיקסלים למיקומים בעולם האמיתי, המערכת מסוגלת לחלץ עקבה כחולה חלשה מסצנות רועשות ושוצפות שמש. למרות שהביצועים יורדים בתנאים של בהירות קיצונית ובצבעי חפצים מסוימים, הגישה פותחת דלת לסריקה שגרתית וזולות יותר של שוניות, קירות נמל ושרידים מוצפים, ומסייעת למדענים ושמרנים לבנות העתקים דיגיטליים נאמנים של עולמות תת־מימיים.
ציטוט: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
מילות מפתח: סריקה תלת־ממדית תת־מימית, שחזור קו לייזר, מיפוי ים רדוד, דימות ענן נקודות, ארכיאולוגיה תת־מימית