Clear Sky Science · he
SPICE-HL3: מאגר נתונים של פוטון יחיד, אינרציאלי ומצלמות סטריאו לחקירת נופי קוטביים גבוהים של הירח
מדוע צללים על הירח חשובים לרובוטים
משימות עתידיות לאזורי הקטבים של הירח שואפות לנצל מים קפואים ומשאבים נוספים, אך אזורים אלה הם גם מבין המקומות המתוירים ביותר במערכת השמש מבחינה ויזואלית. צללים ארוכים ונעים, סנוור עז, וחושך כמעט מוחלט יכולים לטעות בקלות את מצלמות הרובוט. מאמר זה מציג את SPICE‑HL3, מאגר נתונים חדש פתוח שיצרו בתוך חדר המחקה "חתיכה מהירח" ומאפשר למדענים ברחבי העולם לבדוק כיצד רובוטים רואים ונעים בתנאי הקטבים הקשים הללו, כולל עם מצלמת פוטון‑יחיד מתקדמת שיכולה ממש לראות בחושך.
בניית חתיכה מקוטב הירח על פני כדור הארץ
מאחר שמידע אמיתי מקוטבי הירח נדיר ויקר להשגה, הצוות הקים משטח ניסוי מבוקר בשם LunaLab באוניברסיטת לוקסמבורג. זהו נוף פנימי בגודל 11 על 8 מטר מלא בזפת בסלטית גסה, סלעים וקרטראות, מוקף בקירות ותקרות שחורים כדי לדמות את סביבת הירח הסופגת־האור והחסרת‑האוויר. ספוטלייט עוצמתי וניתן לתזוזה מדמה את השמש שיושבת נמוך מאוד על האופק, ויוצר צללים ארוכים וחדים והבדלי בהירות עצומים בין מדרונות מוארים לבין פנימיות קרטראים באפלה מוחלטת. על ידי שינוי מיקום ותפוקת המנורה שוחזרו ארבעה משטרי תאורה מובחנים—הפניה, צהריים, שחר/דמדומים ולילה—בדומה למה שרובר יחווה במהלך יום לונרי מלא בקרבת הקטבים. 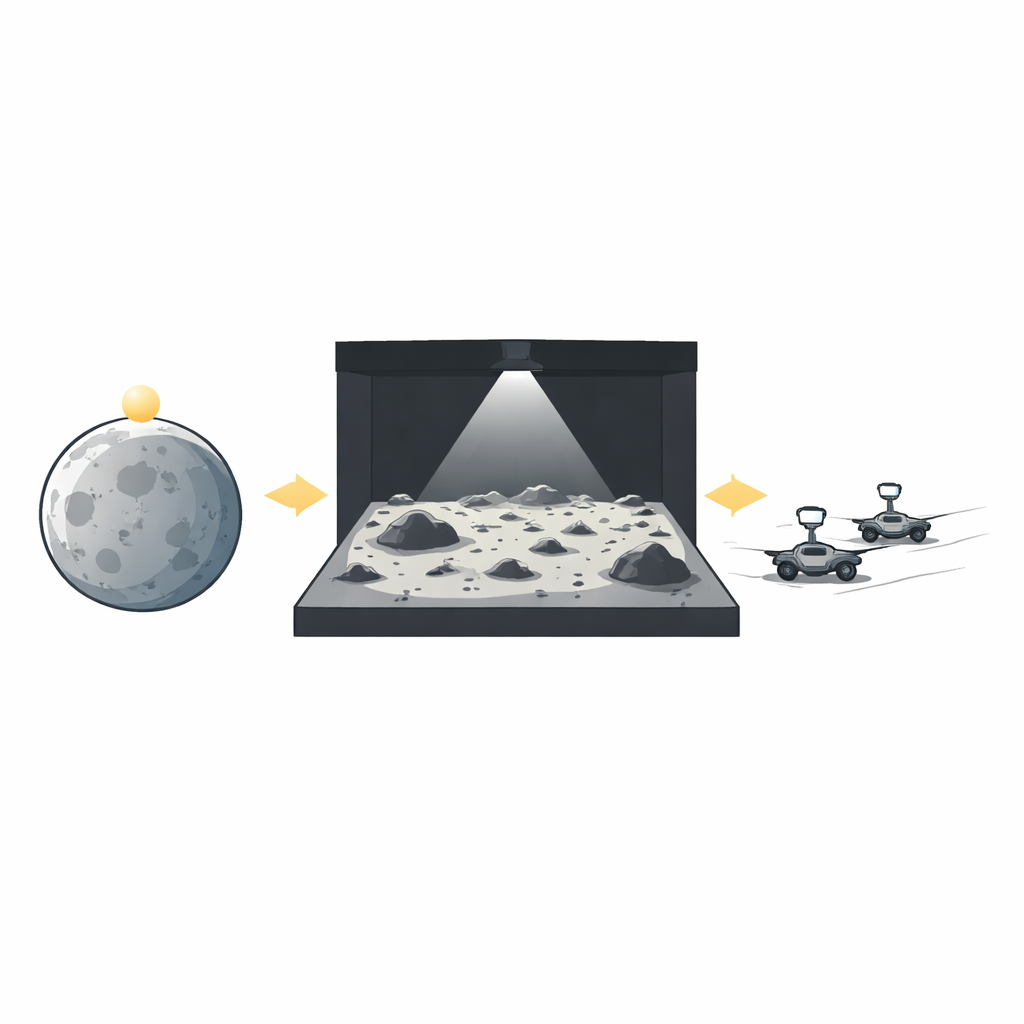
רוברים, חיישנים ומצלמה הסופרת פוטונים בודדים
המאגר נאסף באמצעות שני רוברים קטנים בעלי גלגלים שנשאו קומבינציות שונות של מצלמות וחיישני תנועה. רובר אחד נשא מצלמה חד‑גונית קונבנציונלית ומצלמת SPAD (דיודת התפרצות מפוטונים) חדשנית; השני נשא מצלמת סטריאו צבע‑ועומק עם חיישן תנועה משולב. שני הרוברים רישמו סיבובי גלגלים ונתוני אינרציה, בעוד שמערכת מעקב תנועה תקרתית עקבה אחרי מיקומיהם האמיתיים בדיוק תת‑מילימטרי. מצלמת ה‑SPAD היא הטכנולוגיה הבולטת: במקום למדוד אור כערך עוצמה חלקי, כל פיקסל מדווח האם זיהה פוטון יחיד, במהירות וברגישות גבוהות מאוד. באמצעות חיבור רבים מהצילומים הדו־מצביים האולטרה‑מהירים הללו ניתן לשחזר תמונות ששומרות על פרטים גם בסצנות חשוכות או בקונטרסט גבוה מאוד שבהן מצלמות רגילות נוטות לטשטש או להישרן.
תיעוד נסיעות דמויות־ירח במגוון מצבים
כדי להעניק לחוקרים מגרש בדיקה עשיר, המחברים תכננו שבעה סוגי מסלולים לרובר, החל ממעבר ארוך של עצירה‑והמשך המדמה נהיגה פלנטרית זהירה ועד להרצות קצרות ורציפות בכיוונים שונים יחסית לשמש המלאכותית (לעברה, ממנה ובצדדים) ופניות חדות במקום. הם חזרו על מסלולים אלה במהירויות הליכה איטיות ובמהירויות עשר פעמים מהר יותר, תחת תנאי תאורה מרובים, לפעמים עם פנסים של הרובר דלוקים ולפעמים כבויים. בסך הכל SPICE‑HL3 מכיל 88 רצפים מתוזמנים בזמן, כמעט 1.3 מיליון תמונות, ונתוני תנועה ואמת שדה תואמים. התמונות משתרעות מסצנות סטטיות המתאימות לניתוח זהיר ועד רצפים מהירים המעמיסים טשטוש תנועה ושליטה על חשיפה. הכל נארז במבנה קבצים מונגש ומאורגן, עם קבצי כיול שמתארים בדיוק כיצד כל מצלמה וחיישן מיושרים וכיצד השעונים שלהם מסונכרנים בזמנים.
בדיקת ראיית פוטון‑יחיד
מעבר לשחרור הנתונים, הצוות בדק את איכות ושימושיות התמונות שנרשמו. הם השוו כיצד ה‑SPAD, המצלמה החד‑גונית והסטריאו טיפלו בכמה מהמצבים הוויזואליים הקשים ביותר: נסיעות בדמדומים ולילה, ומרוצים שבהם הרובר הביט ישירות אל ה"שמש". תוך שימוש במדדי איכות תמונה פשוטים ובדיקה ויזואלית, הם מצאו שמצלמת הפוטון‑יחיד שמרה באופן עקבי על מבנה גם באזורי בהירות וצל, שמרה על טווח רחב של רמות בהירות ונשארה יציבה במגוון תנאים. מצלמות קונבנציונליות תפקדו היטב כאשר הסצנה היתה מוארת היטב, אך איבדו פרטים באזורים כהים מאוד או ששרפו פרטים ליד מקור האור. המחברים גם וידאו שתוכנות מיפוי ולוקליזציה נפוצות יכלו לעבד בהצלחה את המאגר, ואישרו כי חותמות הזמן, כיולים והפורמטים חזקים דיים למחקר רובוטיקה ממשי. 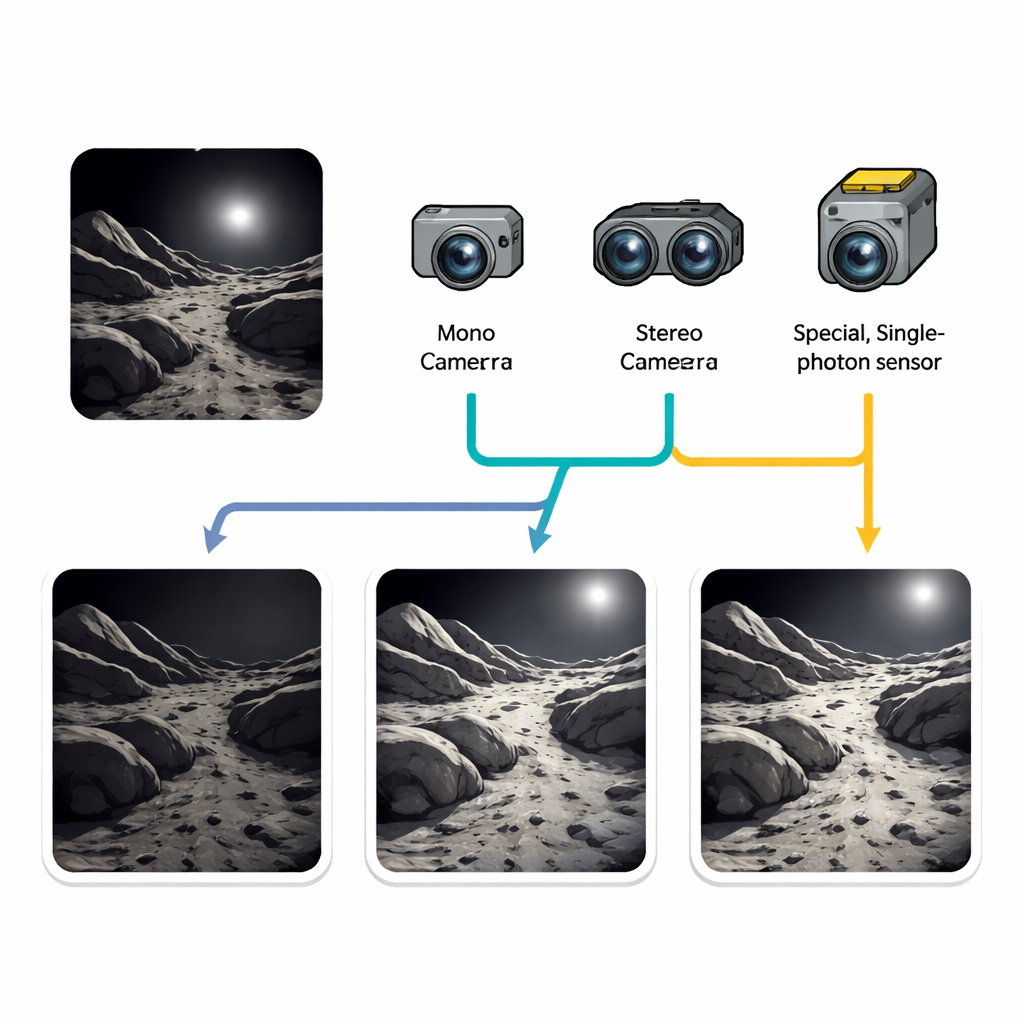
מגבלות, הסתייגויות ולמה זה חשוב
למרות של‑LunaLab אין אפשרות לשחזר בצורה מושלמת את חלקיקי האבק הזעירים ואת אפקטי פיזור האור העדינים של קרקע ירחית אמיתית, וכי זוהר אינפרה‑אדום בלתי‑מתוכנן ממערכת המעקב חדר לסצנות החשוכות ביותר, המחברים טוענים כי SPICE‑HL3 עדיין מייצג סביבה אופטית תובענית של "מקרה־הגס־הגרוע" לראיית רובר. למהנדסים ולמדענים המתכוננים למשימות לקטבי הירח—או המעצבנים רובוטים לכל סביבה עמומה ובעלת קונטרסט גבוה—המאגר מציע מדד נדיר וזמין לציבור. הוא מאפשר להשוות בצורה הוגנת טכנולוגיות מצלמה חדשות כמו חיישני SPAD מול מערכות מסורתיות, לשפר אלגוריתמים לניווט ומיפוי, ולבסוף לסייע להבטיח שרוברים עתידיים יוכלו להמשיך לנוע בבטחה דרך צללי הירח המשתנים במקום להיתקע בחושך.
ציטוט: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
מילות מפתח: רובוטיקה לונארית, נוויגציה פלנטרית, הדמיית פוטון יחיד, מאגרי נתוני ראייה רובוטית, תאורה קיצונית