Clear Sky Science · he
חיישן דימות 4D קוהרנטי בקנה מידה גדול
לראות את העולם בארבעה ממדים
מכוניות אוטונומיות, רחפני משלוחים ומשקפי מציאות מועשרת — כל אלה מסתמכים על מכונות שיכולות להבין בזמן אמת את העולם התלת־ממדי שסביבן. כיום הראייה הזאת לעתים קרובות מגושמת, יקרה או צורכת הרבה אנרגיה. המאמר הזה מדווח על צעד משמעותי לקראת "מצלמת 4D" — חיישן בגודל שבב שלא רק ממפה את צורת הסצנה בתלת־ממד אלא גם מודד כיצד דברים זזים, ובכך עשוי להביא ראייה מכנית קומפקטית לכל דבר, מרובוטים ועד סמארטפונים.
מצילומים שטוחים למפות חיות
מצלמות מסורתיות קולטות עוצמת אור על משטח שטוח, ומייצרות תמונות דו־ממדיות יפות אך ללא מידע ישיר על מרחק. לעומת זאת, מערכות גילוי וטווח באמצעות אור (LiDAR) משדרות פולסי לייזר ומודדות כמה זמן הם לוקחים לחזור, ובונות מפת תלת־ממד של הסביבה. הגישות הקיימות יכולות לראות למרחקים גדולים וברזולוציה גבוהה, אך נוטות לדרוש חלקים נעים, אופטיקה גדולה או אנרגיה גבוהה לכל נקודה הנמדדת. זה מקשה על בניית מערכת קטנה, זולה ועמידה כמו מצלמת סמארטפון, שתוכל עדיין לסרוק רחובות, אתרי תעשייה או חדרים צפופים ברזולוציה גבוהה בבטחה.
שבב שמודד מרחק ותנועה
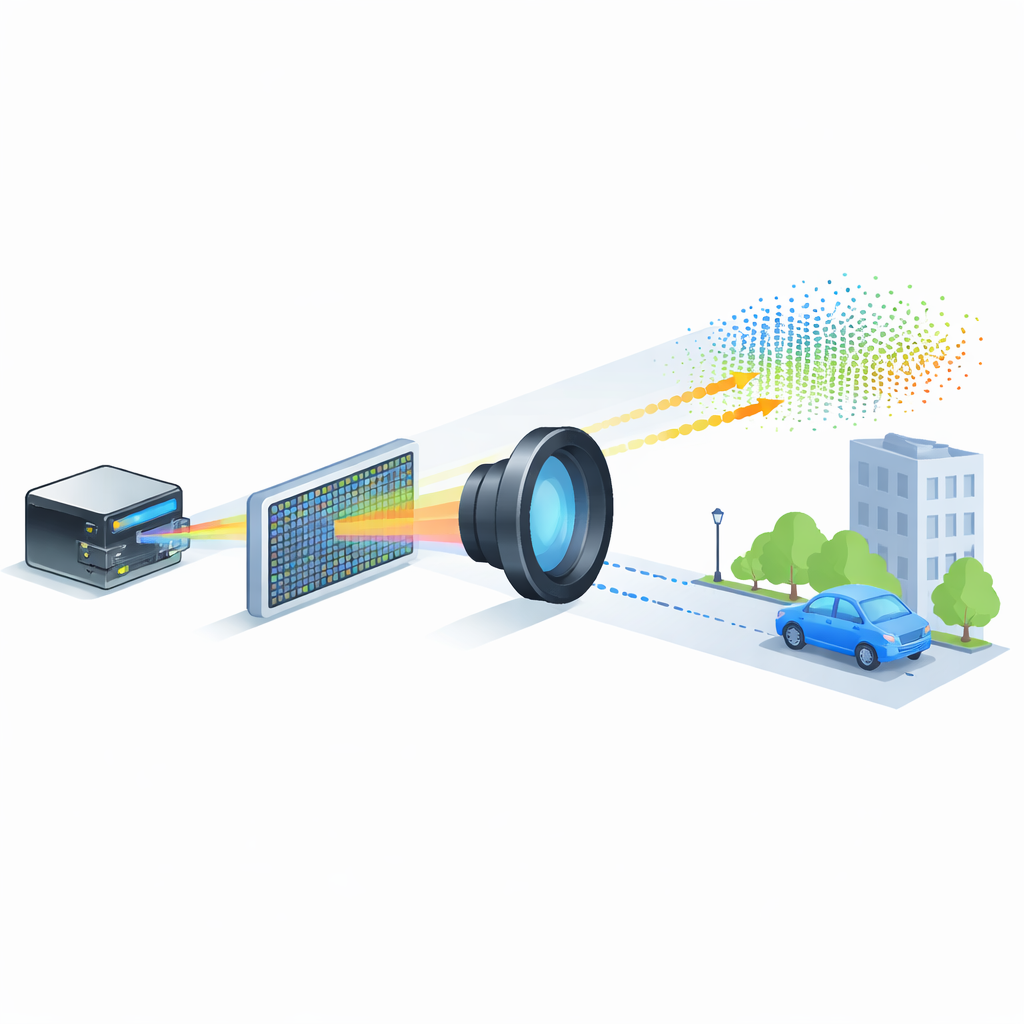
החוקרים מציגים סוג חדש של מערך מישור מוקד LiDAR — במובן מסוים גרסה של שבב הדימות שנמצא במצלמה דיגיטלית. המכשיר שלהם מכיל 352 על 176 פיקסלים, בסך הכל יותר מ־60,000 אתרי חישה, כולם בנויים על שבב פוטוניקה על סיליקון יחיד יחד עם האלקטרוניקה לשליטה. במקום להשתמש בפולסי לייזר קצרים, המערכת נשענת על אור גל רציף במודולציית תדר (FMCW), שבו הצבע של הלייזר מושרה בשיפוע מבוקר — "צ'ירפ". כאשר האור מוחזר מהעצמים וחוזר לשבב, הוא משולב באופן קוהרנטי עם קרן ייחוס. הבדלים קטנים בתדר חושפים גם מרחק של כל נקודה וגם את המהירות שבה היא נעה לעבר או הרחק מהחיישן, ובכך מוסיפים מהירות כממד רביעי הנמדד.
איך רשת האור הזעירה עובדת
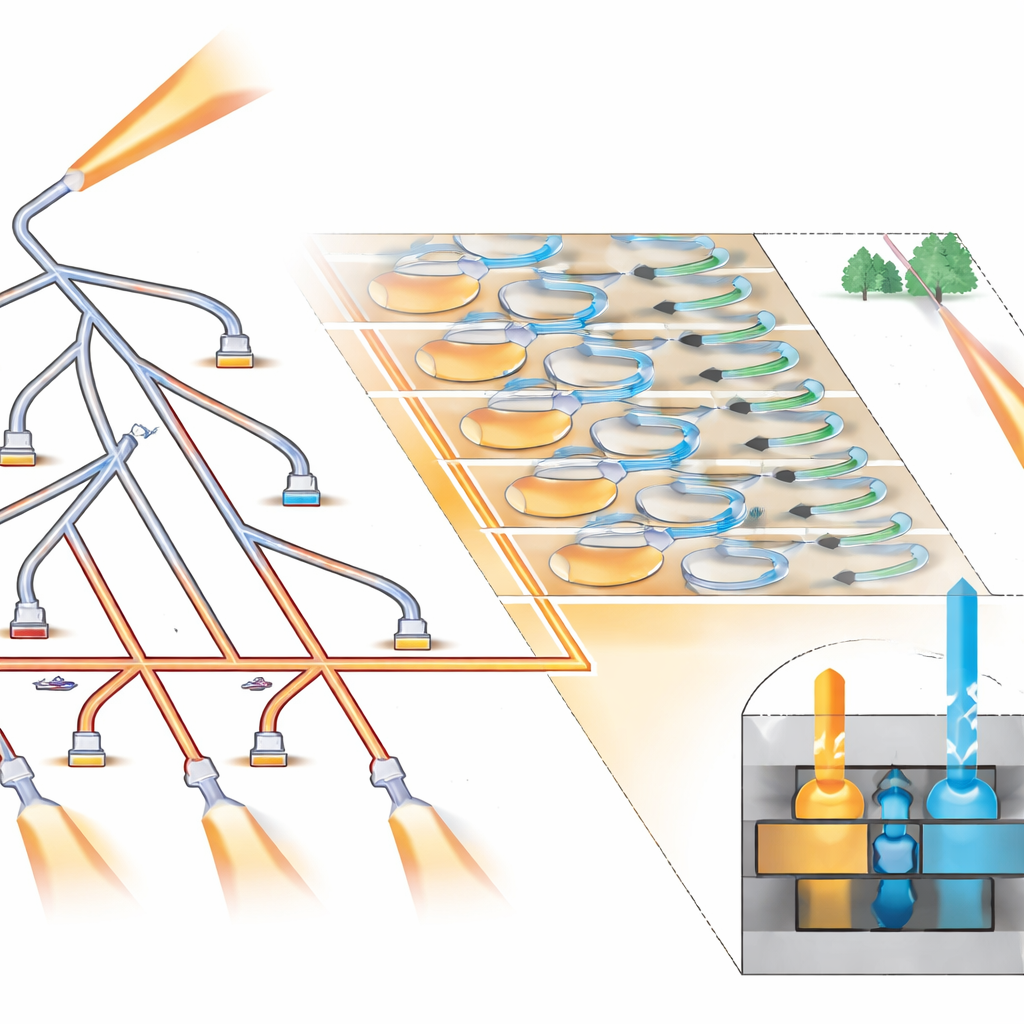
כדי לכסות פיקסלים רבים מבלי לבזבז כוח, השבב מנווט את אור הלייזר המשופר דרך עץ של מתגים אופטיים מיקרו־קטנים, ומכוון אותו ברצף לקבוצות של שמונה פיקסלים סמוכים. בתוך כל קבוצה, האור מחולק באופן שווה כך שכולם מתפקדים כמשדרים ומקלטים בו־זמנית. כל פיקסל משתמש בזוג couplers של גרטינג לשידור ואיסוף אור, בנוסף לזוג גלאים מאוזנים ולמגבר על־הפיקסל כדי לחלץ את אות הביט שמקודד מרחק ומהירות. מיקרועדשות שתוכננו במיוחד ומוטבעות ישירות על השבב מסייעות לנתב יותר אור פנימה והחוצה, ומשפרות את היעילות. מאחר שהפתח השולח גם מקבל אור (עיצוב "מונוסטטי"), המערכת נמנעת מהתאבכות בין פיקסלים וזקוקה רק לעדשה חיצונית אחת, בדומה למצלמה רגילה.
מבחן המצלמה ה־4D
באמצעות עדשות אינפרא־אדום בגל קצר שנרכשו מהמיכון הקיים, הצוות בנה מודול דמוי־מצלמה סביב השבב וצילם ענני נקודות תלת־ממד מדויקים של סצנות פנים וחוץ. עם עדשה אחת, החיישן השיג שדה ראייה של כ־33 על 19 מעלות ורזולוציה זוויתית עדינה של 0.06 מעלות — די כדי להבחין ברהיטים במשרד ובמאפייני ארכיטקטורה על בניינים במרחק עשרות מטרים. המערכת מדדה עצמים בטווח של 4 עד 65 מטר תוך שימוש בעשרות ננוג'אולים של אנרגיה אופטי לכל נקודה ובהספק ממוצע על המטרה של כ־178 מיקרו־וואט לפיקסל, מה ששומר על גבולות בטיחות העין הקפדניים. היא גם עקבה אחרי תנועה: בניסוי אחד מדדה את שינוי מהירות הרדיאלית של דיסק מסתובב בדיוק של מילימטרים לשנייה.
ביצועים, מגבלות וצמיחה עתידית
מדידות קפדניות מראות שביצועי החיישן קרובים למגבלות הפיזיקליות היסודיות שנקבעו על ידי הטבע הקוונטי של האור, אך עדיין לא הגיעו לשם לחלוטין. כיום המגבלה העיקרית היא רעש אלקטרוני מהמגברים בכל פיקסל, שמפחית במעט את יחס אות לרעש בהשוואה לגלאי אידיאלי המוגבל אך ורק על ידי פאוטונים. המחברים מתארים התאמות עיצוב פשוטות — בעיקר הגדלת רמת האור הייחוס הפנימי ושיפור הסידור האופטי, ואפשרות של שימוש בתערובות סיליקון–נותרן סיליקון — שיכולות לדחוף את המערכת למשטר באמת מוגבל רעש־פאוטונים ולהרחיב את הטווח השימושי מעבר ל־200 מטר. העתקת חלק מהמתגים על השבב מחוץ למערך הפיקסלים תסיר גם פערים קטנים בכיסוי השדה הרחוק, ותייצר ענני נקודות נקיים יותר.
לקראת ראיית 4D יומיומית
העבודה הזו מדגימה חיישן דימות 4D קומפקטי ומשולב לחלוטין שמתחרה בספירת הפיקסלים ובטווחים שנדרשים על ידי יישומים רבים במציאות, תוך שמירה על צריכת כוח וגודל סבירים. על ידי הבאת משדרי אור, מקלטים, כיוון קרן ואלקטרוניקת בקרה על שבב סיליקון יחיד, המכשיר ממלא תפקיד דומה לחיישן CMOS בתחום הצילום הדיגיטלי עבור חישה תלת־ממדית ותנועתית. עם שיפורים נוספים, חיישנים כאלה עשויים להפוך לזולים ועמידים מספיק כדי לשולבו ברכבים, רובוטים, טלפונים ומשקפיים, ולתת למכונות הבנה מדויקת בזמן אמת של העולם התלת־ממדי וכיצד הוא משתנה מרגע לרגע.
ציטוט: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
מילות מפתח: LiDAR, דימות 4D, פוטוניקה על סיליקון, מערכות אוטונומיות, חישה של עומק