Clear Sky Science · he
ייצור במקום בקנה מידה גדול של עור אלקטרוני מולטימודלי לרובוטיקה חכמה ומערכות אינטראקטיביות
להעניק לרובוטים ולצעצועים תחושת מגע
דמיינו רובוט שיכול להרים בעדינות פרוסת טוסט חם מבלי למעוך אותה או לשרוף את יומכם, או צעצוע שמגיב שונה כשחבקתם אותו, כיפפתם את אוזנו, או חיממתם אותו בכף היד. מחקר זה מתאר סוג חדש של "עור אלקטרוני" שמקרב את הרעיונות האלה למציאות על ידי הענקת חוש מישוש עשיר יותר, אנושי יותר, למכונות ולסביבתן הקרובה.
למה למכונות צריך מגע משופר
הרובוטים והמכשירים של היום עדיין מגושמים בהתמודדות עם העולם האמיתי. רבים מסוגלים לחוש רק דבר יחיד, כמו לחץ, ולעתים מתבססים על רכיבים גדולים שמורכבים ביד וקשה להגדילם בהיקף. עור אנושי אמיתי מערבב כל הזמן כמה אותות בו־בזמן: מגע עדין, לחץ חזק, מתיחה, חום ואפילו תחושה של קרבה לפני מגע. המחברים שואפים לבנות גרסה אלקטרונית של עור שיכולה ללכוד מספר תחושות אלו במקביל, תוך היותה דקה, גמישה וקלה להתאמה למשימות שונות.
לבנות חוש מגע דק וגמיש
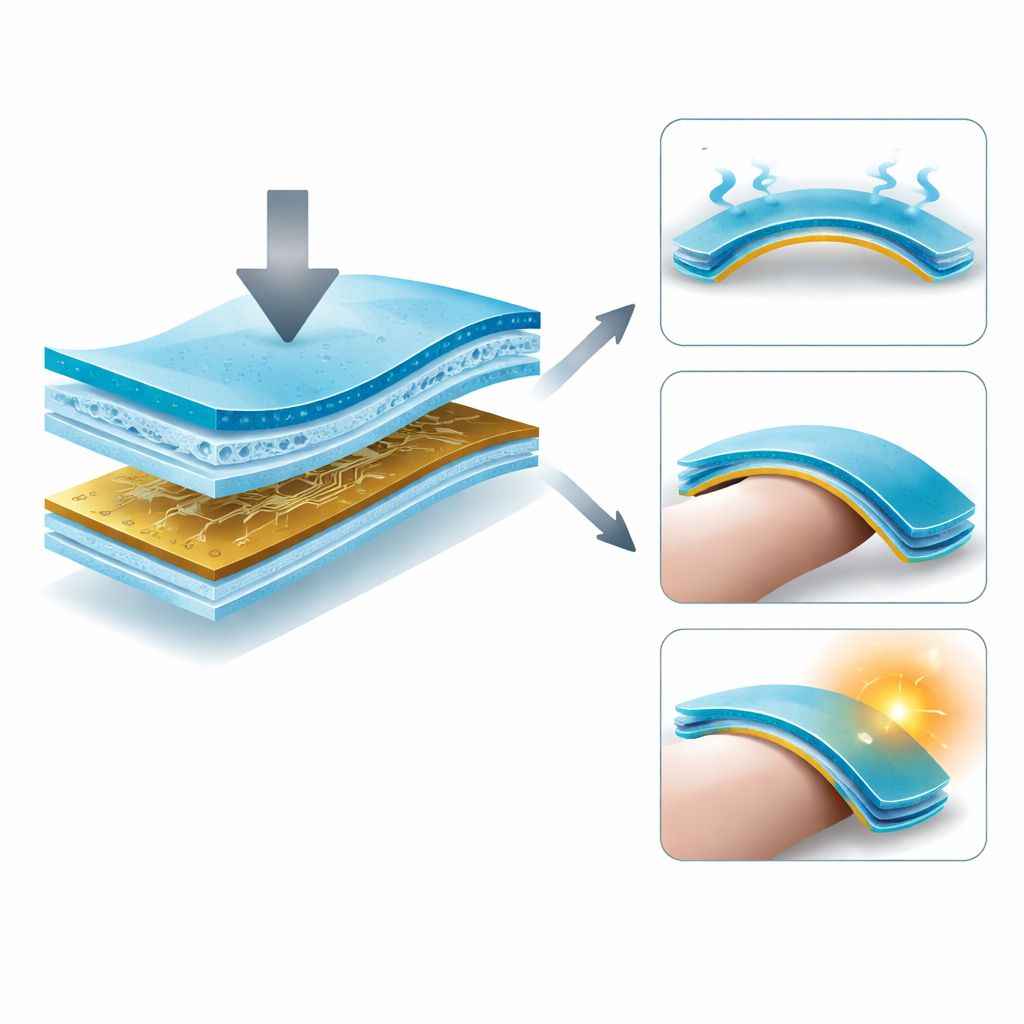
הצוות יצר "עור-אלקטרוני" דק באמצעות תהליך ללא חדר נקי שניתן להרחבה ולהתאמה מהירה. בליבו מעגל נחושת גמיש שמעוצב בלייזר אולטרה-סגול, המשמש ככבלי המעגל אך יכול להתכופף ולעטוף עקומות. מעל ומתחת למעגל זה הוסיפו שכבת סיליקון רכה מלאה בנקבוביות אוויר זעירות, בדומה לספוג. המשטחים החיצוניים מצופים בשכבה דקה של צינורות פחמן, היוצרים מעטפת מוליכה שמגנה על המכשיר מרעש אלקטרוני ומשמשת גם כשכבת ייחוס משותפת לחישה. הערימה הזו מאפשרת לכל פד חיישני להתנהג כמו קבל חשמלי זעיר שערכו משתנה כאשר החומר נלחץ, מתכופף, מתחמם או מתקרב לאובייקט. שבבים זעירים נוספים המותקנים על אותו מעגל גמיש מודדים טמפרטורה ומרחק ללא מגע, כך שהגיליון כולו מדמה לא רק קולטני לחץ ומתיחה אלא גם תחושת חום ו"ראייה" קרובה. 
איך החיישנים חשים לחץ ותנועה
חלקי הלחץ והכיפוף של העור האלקטרוני תוכננו להגיב בעוצמה לשינויים קטנים תוך שמירה על עמידות. כאשר משהו לוחץ, הנקבוביות בשכבה הרכה נלחצות, מביאות את השכבות המתכתיות הפנימיות קרוב יותר ומחליפות אוויר בעודף סיליקון. שני האפקטים מעלים את האות החשמלי, במיוחד בלחצים נמוכים שבהם החומר קל ללחיצה. ניסויים הראו שהעור האלקטרוני יכול לזהות מגעים עדינים מאוד, עד כמה עשרות פסקל, עם תגובה מהירה ונדידת אות מועטה אפילו לאחר עשרת אלפים מחזורי לחיצה ושחרור. כאשר הגיליון מתכופף, הוא קופל סביב החיווט הפנימי, שוב מצמצם את המרווח בין השכבות בצד אחד ומגביר את האות. התגובה גוברת באופן בולט בזוויות כיפוף גדולות יותר, בהתאמה לאופן שבו כיפופים בעולם האמיתי נוטים להתמקד באזור אחד במקום להתפשט באופן שווה. בסך הכל העיצוב מאזן רכות, יציבות ורגישות מבלי להשתמש במבנים מונחים מורכבים ששימשו במכשירים קודמים.
מרובוטים במטבח ועד לرفים משחקים
כדי להדגים מה העור האלקטרוני יכול לעשות, החוקרים עטפו אותו סביב ממצק רובוטי והעניקו לרובוט משימה בסגנון בישול. כאשר הממצק מתקרב לפרוסת לחם חמה, מודול זיהוי עומק זעיר המוטמע בעור ממפה תחילה את מרחק האובייקט ומסייע לרובוט למקם את אצבעותיו לפני המגע. לאחר המגע, חיישני הלחץ והכיפוף מנווטים כמה חזק ללחוץ, מונעים החלקה או מעיכת הלחם. חיישן טמפרטורה על אותו גיליון בודק מתי הלחם התקרר מספיק כדי להעברה בטוחה לאדם. בדוגמה אחרת, הצוות בנה צעצוע פיל רך מכוסה בעור אלקטרוני. לחיצה על החזה משנה את קצב מנוע רטט המוסתר כדי לחוש כמו דופק, כיפוף האוזן מפעיל קול, וחום של יד יכול להאיר את הלחיים של הצעצוע, מה שהופך מגע לאינטראקציה שובבה ורגשית.
לראות דפוסי לחץ על פני משטח
מעבר לנקודות יחידות, אותו שיטת ייצור יכולה ליצור מערכי חישה גדולים ללחץ שקוראים היכן ובכמה עוצמה משטח נלחץ. הצוות הדגים רשת בגודל 8 על 15 שפועלת כמו מצלמת לחץ: כאשר אצבעות, משקולות או חותמות לוחצים, המערכת משחזרת את דפוס הכוח ואף מזהה קווי מתאר כמו אותיות. היכולת ללכוד מפות לחץ ומרכזי מסה יכולה לסייע לרובוטים לאזן משא, לזהות חפצים או לשמש כפלטפורמות שקילה חכמות ומשטחים אינטראקטיביים. מכיוון שהתהליך הבסיסי מהיר ומודולרי, מעצבים יכולים לכוונן את הגודל, המרווח והרכות של פיקסלי החישה לשימושים שונים, מרהיטים חכמים ועד מחצלות ניטור יציבה.
מה המשמעות לטכנולוגיה יומיומית
על ידי שילוב מצבי חישה מרובים — לחץ, כיפוף, חום וקרבה — בגיליון יחיד, דק וקל להתאמה, עבודה זו מקרבת את העור האלקטרוני הרבה יותר ליכולות העדינות של עור אנושי. למרות שיש מקום לשפר ביצועים בלחצים גבוהים מאוד ולאוטומציה של חלק מצעדי ההרכבה, הגישה כבר מראה שניתן להוסיף מגע עשיר לרובוטים, צעצועים ומכשירים אחרים ללא חומרה כבדה המורכבת ביד. במונחים מעשיים, הדבר יכול להוביל לרובוטים ביתיים המטפלים בפריטים שבירים בצורה בטוחה יותר, לבישומים רפואיים שעוקבים אחר מגע גוף בנוחות רבה יותר ומוצרים אינטראקטיביים שמגיבים למגענו בדרכים טבעיות בהרבה.
ציטוט: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
מילות מפתח: עור אלקטרוני, חישה מישושית, חיישנים גמישים, ממצק רובוטי, מכשירים אינטראקטיביים