Clear Sky Science · he
רחפן מעופף עצמאי בדמות יד לצורך אחיזה ואינטראקציה באוויר
עוזרים מעופפים שאפשר כמעט ללחוץ את ידם
תארו לעצמכם רחפן קטן שיכול לא רק לצלם את הסביבה אלא גם לפתוח דלת, להעביר לכם משקה או לתלוש חבילה ממדף שקשה להגיע אליו. המחקר הזה מציג בדיוק מכשיר כזה: רחפן קומפקטי שגופו משמש גם כיד. על ידי שילוב רעיונות מטיסת ציפורים ודרך האחיזה האנושית, החוקרים מראים כיצד רובוטים מעופפים יכולים להתרחק מצפייה פסיבית ולהפוך לעוזרים פעילים בבתים, במפעלים ובמצבי חיפוש והצלה.
ממצלמות מעופפות לידיים מעופפות
רוב הרחפנים כיום הם "עיניים מעופפות" המשמשות לצילום, למיפוי או לבדיקה. כשמהנדסים מנסים להוסיף זרועות רובוטיות כדי שהרחפן יוכל לתפוס או לדחוף חפצים, המכונות מהר הופכות למגושמות, כבדות, צורכות־אנרגיה וקשות לשליטה—במיוחד בפנים מבנים או ליד אנשים. המחברים מתמודדים עם הבעיה על ידי חשיבה מחדש של גוף הרחפן עצמו. במקום לחבר זרוע נפרדת, הם מעצבים את המסגרת כולה כך שתפעל כמו יד שיכולה לעטוף חפצים, להיתפס לעמודים או לעצים ועדיין לעוף בחינניות במרחבים צרים.
גוף מעופף בדמות יד
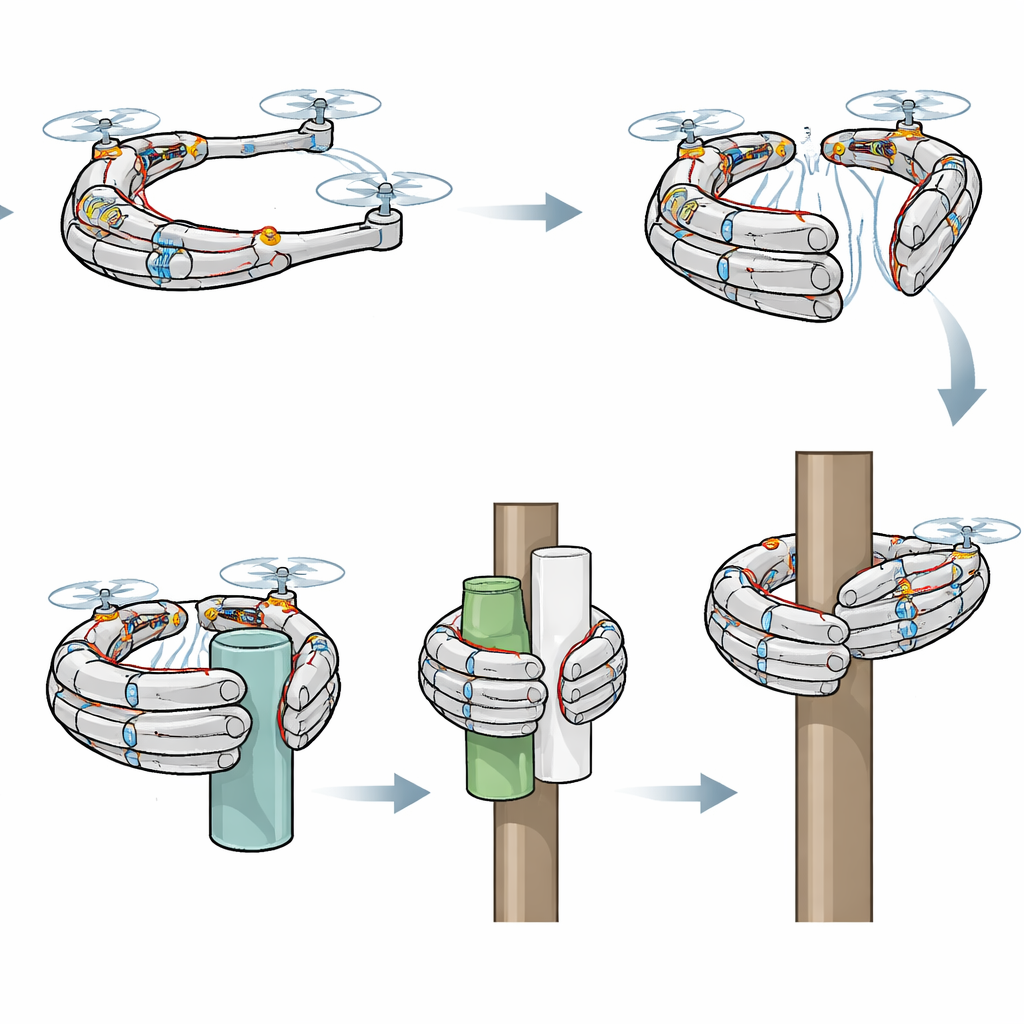
הרובוט החדש, הנקרא HI‑ARM, בגודל ובמשקל של כף יד בוגרת. המסגרת שלו יוצרת צורת C פתוחה שמזכירה כף יד מעוגלת עם אצבעות. בתוך הטבעת הזו יש מקטעים טלסקופיים ומפרקים מסתובבים, המונעים לא על ידי מנועים רבים אלא על ידי כבל אחד דמוי גיד שמורכב על ידי סרבו יחיד. קפיצים מאפשרים למבנה להתכופף ואז להיפרד חזרה לצורתו המקורית, מאחסנים ומשחררים אנרגיה בדומה לשרירים וגידים. העיצוב המועט־הנעת מאפשר לרובוט להסתגל סביב חפצים לא ידועים: ככל שהכבל נמתח, חלקים שונים נדחסים ומתפתלים עד שהם מתאימים באופן טבעי למה שנתפס.
איך הרובוט חושב ועף
כדי להפוך את הגוף המשתנה הזה לשימושי, הצוות בונה "מוח" בשכבות לרובוט. חלק אחד מתכנן לאן הרחפן צריך לעוף ומתי עליו לתפוס, לשחרר או להשתחל, ומושפע מספריית פעולות בסיסיות כמו "לתפוס", "לשחרר" או "להיתפס לעמוד". חלק אחר מתרגם את התוכניות האלה לנתיבי תנועה חלקים במרחב שהרחפן יכול לעקוב אחריהם בזמן אמת. מערכת בקרה מהירה מעריכה ללא הרף את מיקום הרובוט, את מיקום מרכז הכובד המשתנה כשהוא מעוות, ואת הכוחות הנוספים כשהוא מרימה או דוחף חפצים. אלגוריתמים אדפטיביים חשים בהפרעות האלה ומגבירים או מאזנים אוטומטית את הדחף של ארבעת הפרופלורים כך שהטיסה תישאר יציבה גם כשהגוף לוחץ על בקבוק או דוחף דלת.
מה היד המעופפת הזו יכולה לעשות
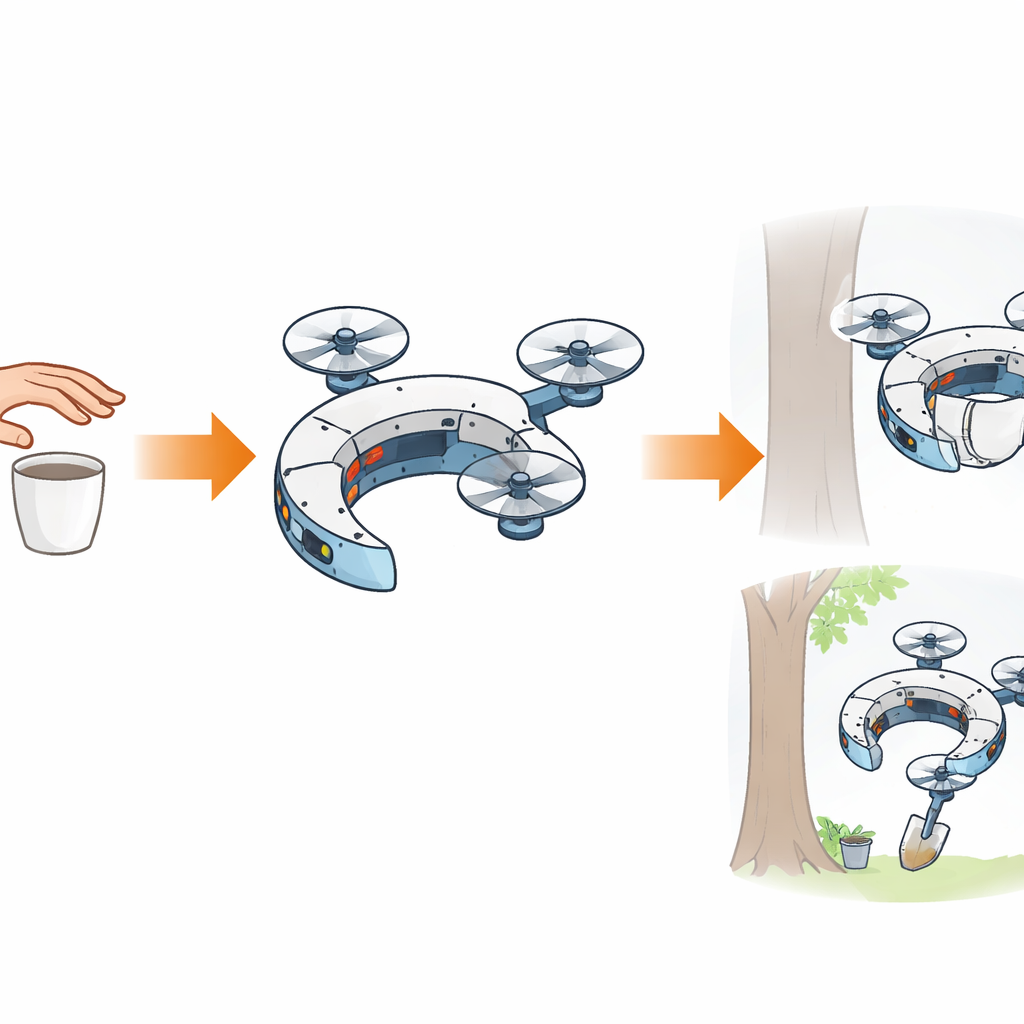
בבדיקות פנימיות, HI‑ARM מבצע פעולות מוכרות הדמות אנושית. הוא משתמש ב"כף" שלו כדי לתפוס ולנשא בקבוק מים מלא לאורך מסלול טיסה מדויק, וב"קצות האצבעות" שלו כדי לצבוט ולהרים מפית דקה יחידה—משימה עדינה במיוחד למכונה. המנגנון עצמו מסתגל לצעצועים, קופסאות, שקיות ובלוקים בצורות מוזרות בלי צורך לדעת את צורתם מראש. הרובוט יכול לעוף אל גזע עץ או עמוד, להדק סביבו, לכבות את הפרופלורים ולפשוט לתלות שם, תוך צריכת כוח נמוכה בהרבה מהציפה באוויר. הוא יכול גם להתקרב לדלת, לעטוף את הידית ולנדנד את הדלת לפתיחה בעודו שומר על שיווי המשקל למרות כוחות התגובה.
לעזור לאנשים ולעבוד בחוץ
החוקרים גם בוחנים כיצד מכשיר כזה יכול לאינטראקציה עם אנשים. בסצנה דמויית בית, הרחפן מקבל חבילה מידיו של אדם, מסדר אותה במקום, מביא משקה מהשולחן, מוסר אותו, אוסף מאוחר יותר את הבקבוק הריק ולבסוף נוחת על קולב כדי לחכות למשימה הבאה—כל זאת ברצף רציף וחלק. באמצעות משקפי וידאו ובקר פשוט ביד אחת, אדם עם מוגבלות בתנועה מנחה מרחוק את הרובוט לאחוז כוס קפה בחוץ ולהחזירה למרחק של עשרות מטרים. בניסויים חיצוניים, הרחפן נוחת על במבוק ועמודים, חוצה פתח צר בסלע על ידי הקטנת גופו ונושא משקה על פני נהר, מרמז לתפקידים בהורגשה, בבדיקה ובהצלה.
מה משמעות הדבר לחיי היומיום
העבודה מראה שרחפן קטן בדמות יד יכול לשלב טיסה זריזה עם דרכי אחיזה, היתפסות ואינטראקציה עם חפצים ואנשים באופן מפתיע דמוי־אנוש. על ידי שילוב הדוק של עיצוב הגוף, תכנון התנועה ובקרה אדפטיבית, המחברים מתגברים על רבות מהבעיות של גודל ויציבות שעיכבו מניפולטורים אוויריים קודמים. בעוד שגרסאות עתידיות יזדקקו לחזון פנימי מתקדם יותר ולקבלת החלטות חכמה יותר כדי לפעול באופן עצמאי מלא, המחקר הזה מצביע לעתיד שבו "ידיים מעופפות" עשויות לסייע במסירת חבילות, לסייע לאנשים עם מוגבלויות, לתחזק תשתיות ולבצע משימות עדינות במקומות שמסורבלים או מסוכנים להגעה עבור בני אדם.
ציטוט: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
מילות מפתח: מניפולציה אווירית, יד לרובוט מעופף, רחפנים, אינטראקציה אדם־רובוט, רובוטיקה בביומימטית