Clear Sky Science · he
קפיצה רובוטית משופרת על ידי היפו-כבידה שנוצרת בעזרת דחף, ההשגה של קפיצות מדויקות, צפויות ומורחבות
רובוטים שיכולים לקפוץ כאילו הם על הירח
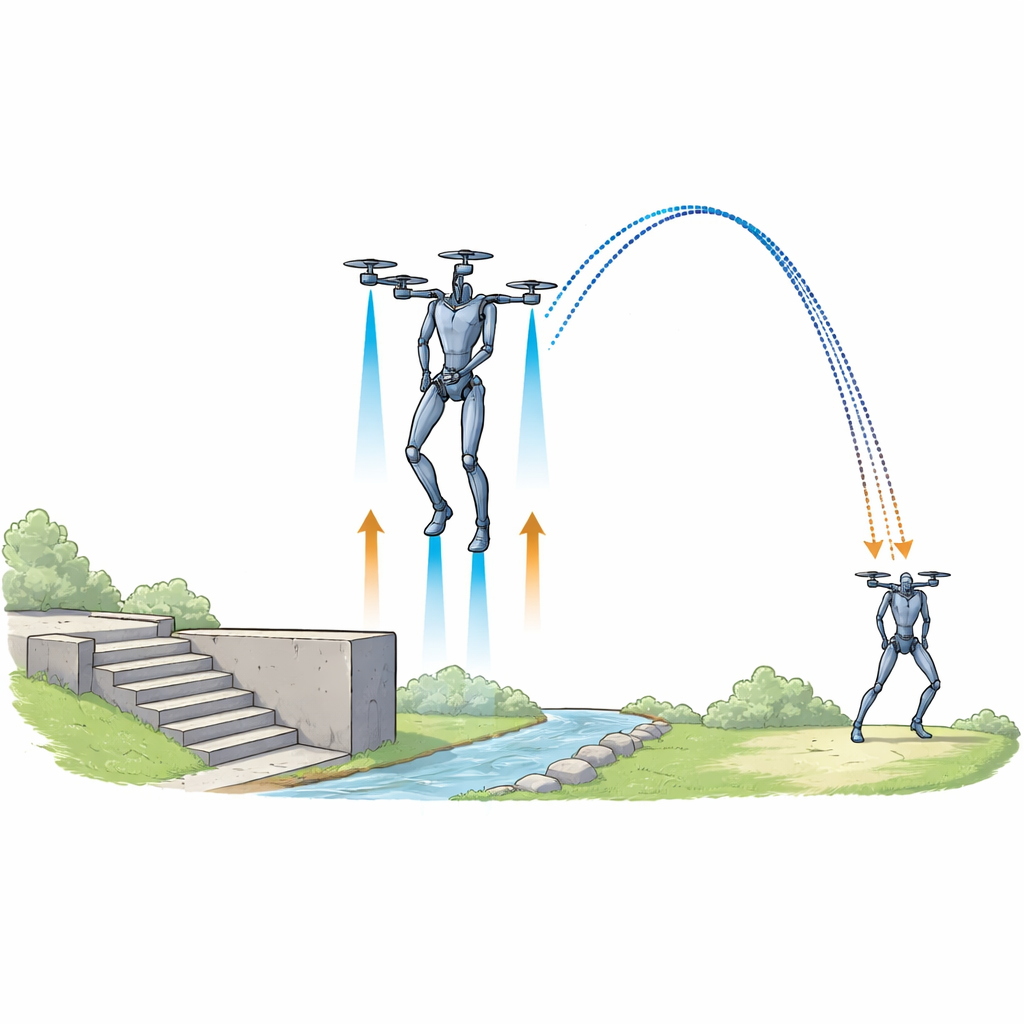
דמיינו רובוט חילוץ היכול לקפוץ מעל קירות, לעבור נחלים או לחלוף דרך חלון נע בלי לפספס את נקודת הנחיתה ביותר ממילימטר אחד. המאמר הזה מתאר סוג חדש של מכונה קופצנית שעושה בדיוק את זה על ידי מתן "כבידה נמוכה" קצרה לעצמו, בדומה לשהייה על הירח או פלוטו, תוך שמירה על קפיצות מדויקות וצפויות.
מדוע רובוטים קופצים נתקלים בקשיים היום
חיות כמו צרצרים או צפרדעים יכולות לקפוץ למרחקים רביים, לנחות על משטחים צרים ולהתאים את עצמן באוויר כשמשהו משתנה. רוב הרובוטים אינם מסוגלים לכך. רובוטים קופצים מסורתיים נתקלים בפשרה: הם יכולים או לקפוץ מאוד רחוק בעזרת קפיצים חזקים או מנועים חזקים, או לנחות בדיוק ובבטחה — אך לעיתים נדירות שניהם גם יחד. עיצובי "צלופח" המאופסנים בקפיץ צוברים הרבה אנרגיה אך איטיים להטענה וקשים לשליטה ברגע שהם באוויר. רגליים המונעות ישירות על ידי מנוע נוחות יותר לשליטה אך נוטלות את הדחף הדרוש לקפיצות גבוהות מאוד. כנפיים או מדחפים חיצוניים יכולים להאריך את זמן התעופה, אך לעיתים קרובות הם מעוותים את מסלול הטיסה והופכים אותו בלתי צפוי — בעיה כאשר צריך לפגוע במטרה קטנה או להתחמק ממכשולים נעים.
הפרזה בכבידה נמוכה בעזרת דחף אווירי
החוקרים בנו רובוט דו-רגלי במשקל 370 גרם בשם GravOff שמתחכם לעקוף את הפשרה הזו על ידי יצירת סביבה של כבידה נמוכה עבור עצמו. לרובוט זוג רגליים ארוכות הדומות לחרקים שמונעות ישירות על ידי מנועים, וכן ארבעה מדחפים קטנים המותקנים על מסגרת רחבה. במהלך הקפיצה, הרגליים נותנות דחיפה מהירה מהרצפה כדי להשיג מהירות המראה גבוהה. במקביל, המדחפים דוחפים מעלה במידה מספקת כדי לנטרל חלק מכוח הכבידה של כדור הארץ — מצב שהמחברים קוראים לו היפו-כבידה הנוצרת על ידי דחף. מאחר ש"הכבידה האפקטיבית" נמוכה יותר, אותה כוח רגל שולח את הרובוט לאורך קשת גבוהה וארוכה בהרבה — עד 6.9 מטרים בגובה, כ-46 פעמים גובה גופו — בדומה לשיאי הקופצים הטובים ביותר אך עם מהירויות המראה ונחיתה שקולות ועדינות יותר.
שרטוט והיגוי של הקשת המושלמת
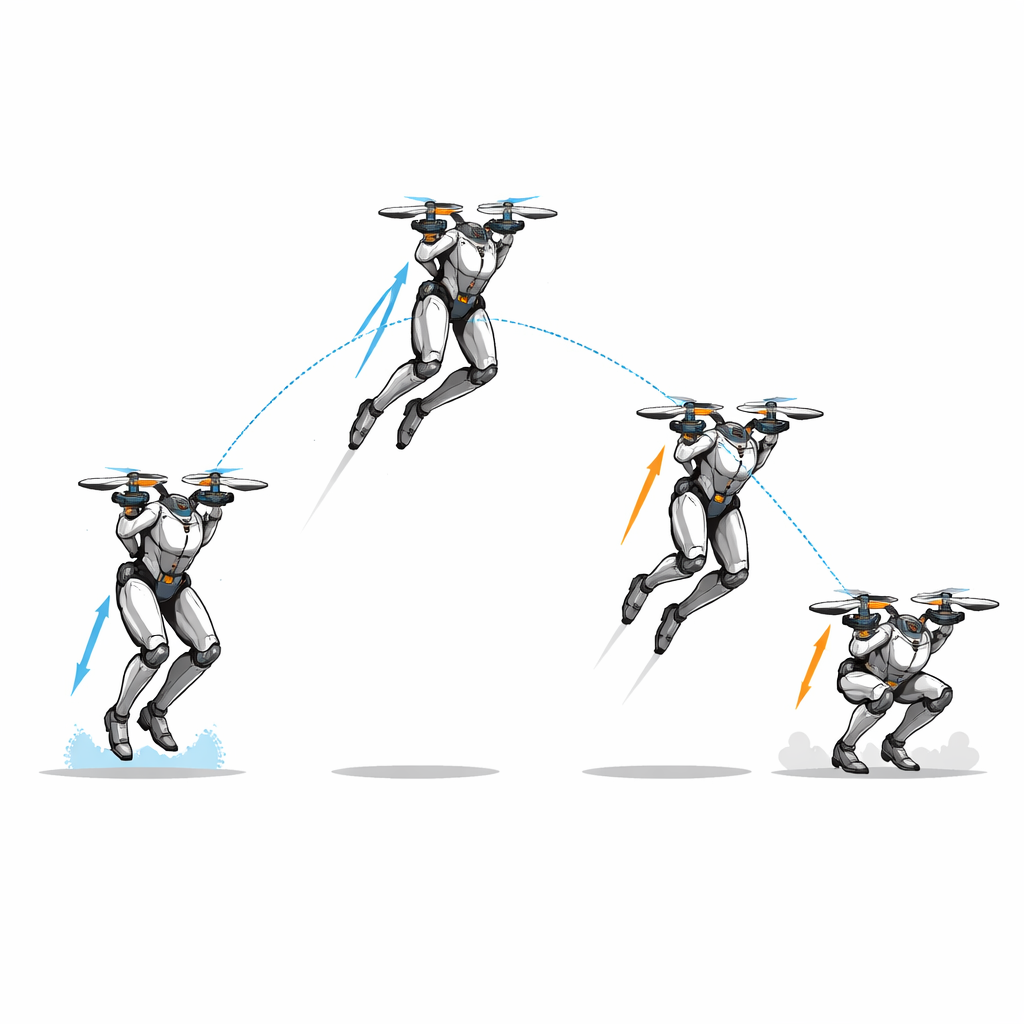
מה שהופך את GravOff למיוחדת במיוחד הוא לא רק המרחק שהוא קופץ, אלא עד כמה הוא עוקב בדיוק אחרי מסלול שנבחר. הצוות מתייחס לכל קפיצה כאל קשת מתוזמנת, שבה המיקום והזמן נעולים זה בזה כמו נקודות על פרבולה מצוירת. בעזרת חיישנים ואלגוריתם בקרה חזוי, הרובוט משווה את התנועה בפועל שלו באוויר לעקומת הייחוס הזאת עשרות פעמים בשנייה ומשנה מעט את זווית המדחפים כדי לדחוק את עצמו חזרה למסלול. הדבר המרכזי הוא שהמדחפים יכולים להשנות כיוון באופן עצמאי מזווית הנטייה של שלדת הרובוט, כך שהרובוט יכול לכוון את הדחף מבלי להטות את כל המסגרת, ושומר על נפרדות בין שימור שיווי המשקל וההיגוי. בקרה כפולה זו מאפשרת ל-GravOff לנחות בתוך ריבוע שצלעו רק 25 סנטימטרים בדיוק ברמת מילימטרים עם יכולת חזרה מדויקת, גם כשזווית ההמראה שגויה בעד 15 מעלות או כשמערבל רוח חזק דוחף אותו במהלך הטיסה מהר של 3.5 מטר לשנייה.
נחיתות רכות ויציבות ללא קפיצות חוזרות
קפיצות גבוהות בדרך כלל מובילות לנחיתות קשות, שעלולות להזיק לחומרה או לגרום לרובוט להתהפך. GravOff מתמודד עם זאת בשתי דרכי נחיתה. למקרים של פגיעות קשות במיוחד, בולם זעזועים רך המודפס בתלת-ממד בכל רגל מסייע לספוג אנרגיה. לנחיתות מדויקות על מטרות קטנות או נעות, הרובוט מושך את רגליו פנימה ואז מיישר אותן מחדש בדיוק ברגע המתאים, מה שמאריך את זמן המגע עם הקרקע. "הדמפינג הפעיל" הזה מצמצם את כוחות ההשפעה פי ארבע בהשוואה לנחיתה פסיבית וכמעט מבטל את התנע הנכנס, כך שהרובוט נעצר בנחיתה הראשונה במקום להקפץ החוצה.
מנסיינות מעבדתיות למשימות בעולם האמיתי
מעבר לניסויים נשלטים בתוך מבנה, המחברים מראים כי GravOff יכול לשלב קפיצה עם זחילה ונסיעה על גלגלים כדי להתמודד עם שטח מציאותי. הוא יכול לזחול לאיטו על דשא, חול, אבנים וסלילה חרוצה כדי ליישר תנוחת המראה בטוחה, ואז להשתמש בקפיצות בהיפו-כבידה כדי לעבור על מכשולים כגון מדרגות רב-שלביות, קיר בגובה 2.35 מטר או נחל ברוחב שלושה מטרים. אסטרטגיית הקפיצה בכבידה מועטה גם הוכחה כיעילה אנרגטית בהרבה לעומת טיסה טהורה במעבר מכשולים בגודל בינוני: במבחנים מסוימים, הקפיצות צרכו פחות מעשירית מהאנרגיה הכוללת הנדרשת להשארה מעל המחסום או לטוס מעליו.
מה זה אומר עבור הרובוטים של העתיד
במונחים פשוטים, עבודה זו מראה שרובוטים יכולים לקפוץ רחוק יותר, מדויק יותר ובבטחה רבה יותר על ידי התרשמות מכבידה חלשה יותר ועל ידי התאמת מסלול הטיסה לאחר ההמראה. העיצוב של GravOff רומז על חוקרים עתידיים שיכולים לקפוץ מעל הריסות בזמן תגובה לאסון או לחצות מצוקים ואובלי קרח בכוכבי לכת אחרים, הכל תוך חיזוי מדויק של מיקום וזמן הנחיתה. אותן רעיונות — פיצוי כבידה בעזרת דחף והיגוי הקשת באמצע הטיסה — ניתנים להוספה להרבה רובוטים קופצים אחרים, ועשויים להפוך את הקפיצה לאמצעי נסיעה אמין שמתוכנן מראש במקום כאמצעי סיכון אחרון.
ציטוט: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
מילות מפתח: רובוטים קופצים, היפו-כבידה, ווקטורינג דחף, תנועה על רגליים, בקרת מסלול