Clear Sky Science · he
ארכיטקטורת ספייקים בהשראת ביולוגיה מאפשרת קידוד מישוש בחיסור אנרגיה
למה מישוש חכם חשוב לרובוטים
קצות אצבעותינו מאפשרים לנו להרגיש גרגיר חול, כוס שמתנתקת מאחיזתנו או נגיעה עדינה בשבריר שנייה, וכל זאת תוך שימוש באנרגיה מועטה באופן מפתיע. כאשר רובוטים יוצאים מהמפעלים ונכנסים לבתים, בתי חולים ומקומות עבודה הומי אדם, הם יזדקקו לחוש מישוש דומה כדי לפעול בבטחה עם אנשים וחפצים שבירים. המחקר מציג עור מלאכותי חדש ומערכת עיבוד בהשראת המוח שמאפשרת למכונות לזהות במדיוק גבוה היכן נוגעים בהן, תוך שמירה על צריכת אנרגיה נמוכה מאוד — דרישה מרכזית לרובוטים ניידים ומשתפים בעתיד.
עור גמיש שמרגיש כמו שלנו
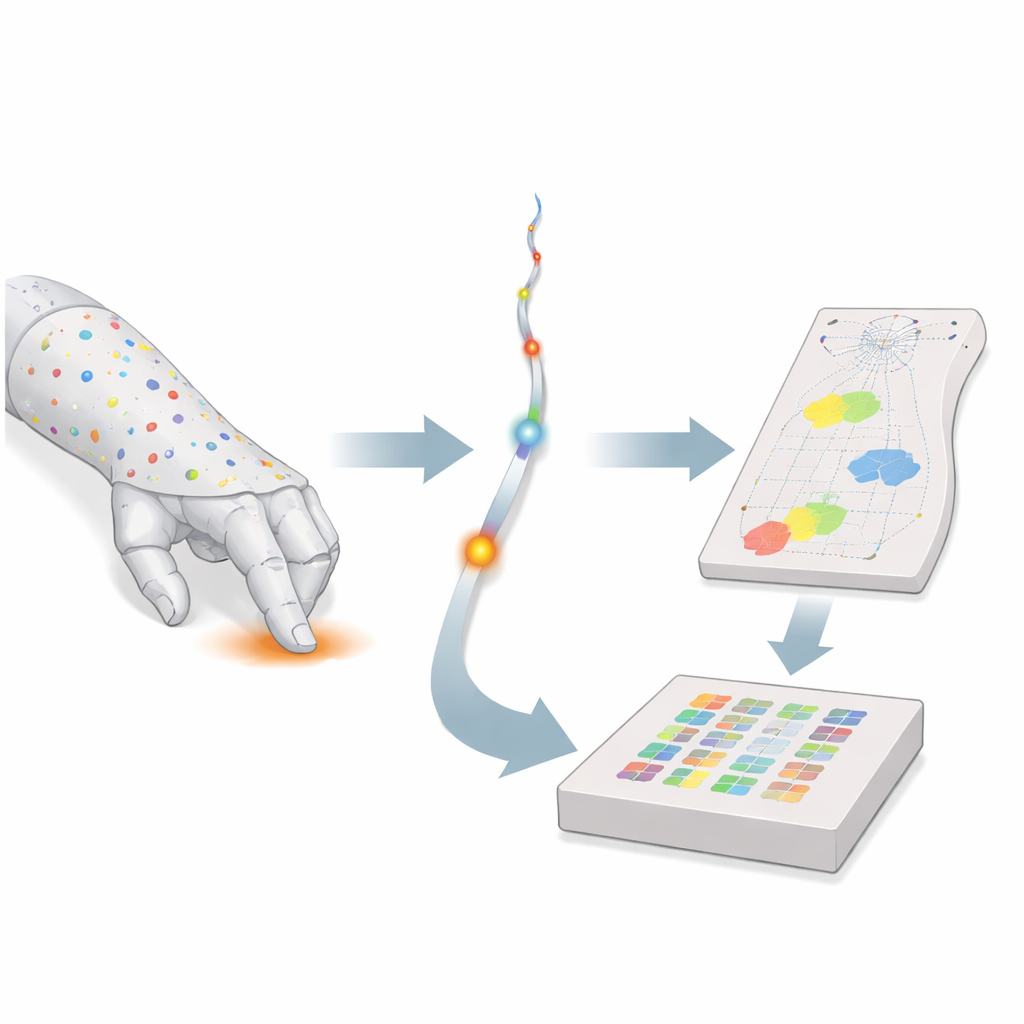
החוקרים בנו "עור אלקטרוני" רך מסיליקון בצורת предпזרו של הזרוע האנושית וחיברו בו 21 חיישנים אופטיים זעירים לאורך סיב דקיק אחד. חיישנים אלה, הנקראים Fiber Bragg Gratings, מגיבים למתיחה וכיפוף של העור על ידי הזזת הצבע של האור המוחזר בתוך הסיב. מאחר שהסיב עובר מתחת לפני השטח, כל חיישן רגיש לא רק לנקודה בודדת אלא לאזור קטן, בדומה לקולטני המישוש האמיתיים המפוזרים בעור שלנו. חלק מהקולטנים המלאכותיים מגיבים חזק ללחץ מקומי מאוד, בעוד אחרים מגיבים באופן רחב יותר לעיוותים, מה שמדמה כיצד קצוות עצביות שונות בעור האנושי קולטות גם פרטים עדינים וגם צורה כללית.
ממישוש לדפיקות חשמליות
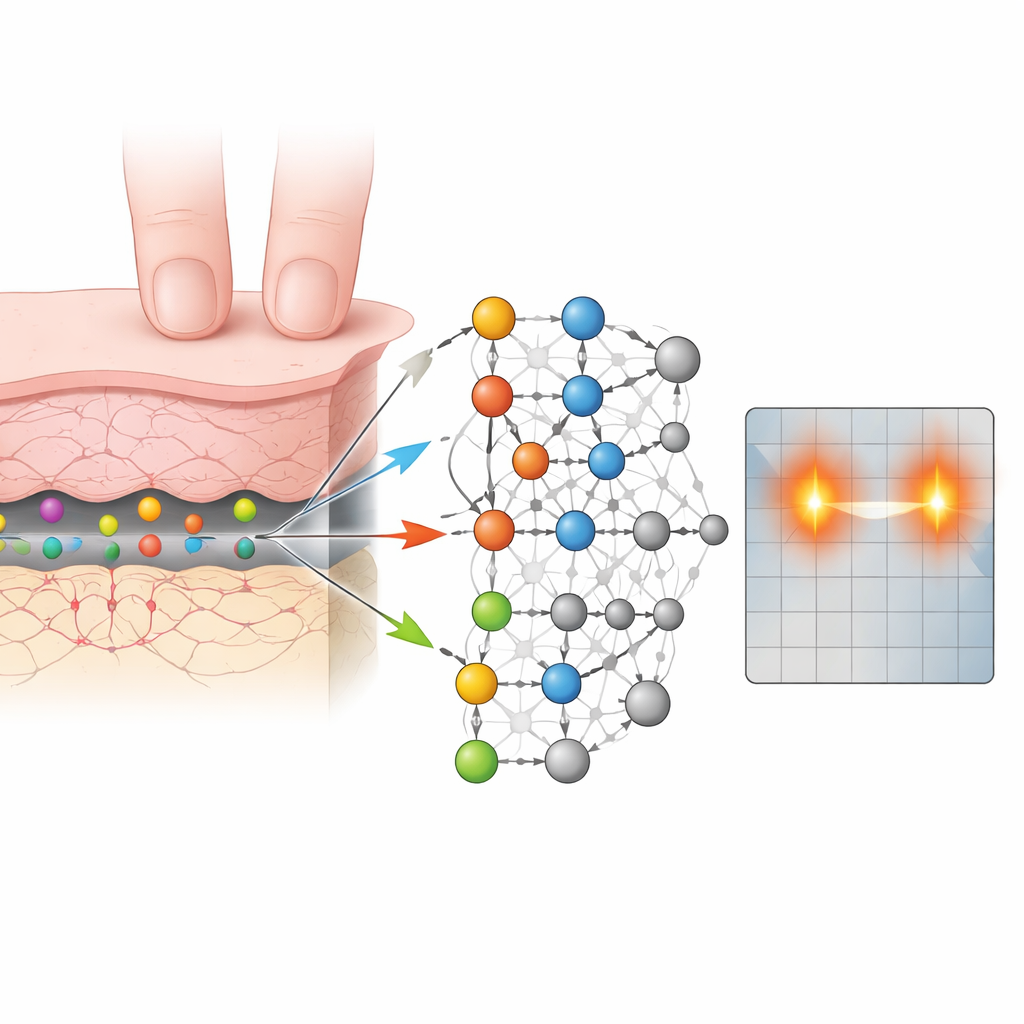
כדי לפרש את זרם המידע העשיר הזה, הצוות לא הסתמך על מודלים קונבנציונליים של למידה עמוקה שעובדים על מסגרות של מספרים. במקום זאת הם חיקו את הביולוגיה ביתר דיוק באמצעות רשת נוירונים קופצת, שבה המידע עובר כדפיקות חשמליות קצרות, או "ספייקים", בדומה לדחפים עצביים. האותות האופטיים מהעור האלקטרוני מומרים לזרמים של ספייקים ונשלחים לרשת. כל נוירון פלט ברשת מייצג נקודה מסוימת על העור, ויוצר מפה פנימית דו־ממדית של המשטח. כאשר משהו נוגע בעור האלקטרוני, צבירה של נוירונים יוצרת דפוס של ספייקים שמגלה היכן התרחש המגע, והמערכת מחשבת את מיקום המגע ממרכז הפעילות הזאת.
מישוש חד יותר עם פחות משאבים
בעזרת העיצוב הזה המערכת ממקמת נקודות מגע בודדות על הזרוע המלאכותית בדיוק אופייני של כשלושה מילימטרים, מתעלה על בסיס חזק של למידה עמוקה בכ־שליש ומשיגה רזולוציה מרחבית טובה פי עשרה מזו הצפויה רק לפי מרווחי החיישנים. היא פועלת גם כשמפעילים מספר נקודות בו־זמנית — עד ארבעה מגעים במקביל — וכשלחיצות מבוצעות ידנית בעוצמות וכיוונים משתנים. החוקרים בחנו תבניות חיבור פנימיות שונות ברשת ומצאו כי תצורה בהשראת מסלולי מישוש מוקדמים בחוט השדרה — שבה תאי עוררות מפעילים אינטרנוירונים מעכבים שמדכאים פלטים סמוכים — חשובה להדגשת פרטים מרחביים. "עיכוב צידי" זה מסייע לשמור על ייצוג חד ולמנוע טשטוש כשמגעים קרובים זה לזה.
נבנתה למען צריכת אנרגיה נמוכה, לא רק דיוק
מטרה מרכזית בעבודה היא להיצמד לצריכת אנרגיה נמוכה, בעיה שהופכת קריטית אם כל גופו של רובוט יכוסה בחיישנים. הצוות אימן את הרשת תחת לחץ הולך וגובר לירות פחות ספייקים, בחיקוי הצורך האבולוציוני לסחור בין ביצועים לבין עלות מטבולית. בתנאים לא מוגבלים ארכיטקטורה גמישה פחות ובעלת ריאליזם ביולוגי נמוך ביצעה מעט טוב יותר. אבל ברגע שפעילות הספייקים הובאה לרמות חסכוניות באנרגיה, התצורה המושרעת בביולוגיה ניצחה בפועל, והציעה דיוק גבוה יותר לאותה תקציב פעילות. לאחר מכן החוקרים העבירו רשת זו לשבב נאורומורפי מעורב־אותות שמממש נוירונים וסינפסות ישירות באלקטרוניקה אנלוגית. על החומרה הזו המערכת הטקטילית פעלה בצריכת כוח תת־מיליווט בזמן מגע ורק כמה מיקרו־ואטים במנוחה, תוך אובדן מינימלי בדיוק.
מזרועות מעבדה לגופים רובוטיים עתידיים
בסך הכול עבודה זו מראה ששילוב מדוד של חישה רכה ומפוזרת עם חישוב קופץ בהשראת המוח יכול לתת למכונות חוש מישוש מדויק ומהיר ללא חשבון אנרגיה כבד. על־ידי התאמת לא רק הביצועים אלא גם עקרונות החיבורים של מסלולי מישוש מוקדמים במערכת העצבית, המערכת מצביעה מדוע האבולוציה ייתכן וכיוונה לתבניות מעגל מסוימות: הן מספקות דיוק מספק תחת מגבלות אנרגיה קשוחות. בקנה מידה גדול, עורות אלקטרוניים ותהליכוני נאורומורפיים דומים יוכלו לאפשר לרובוטים ולמכשירים פרוטטיים לחוש מגע על פני שטחם, להגיב במהירות להיתקלויות בלתי צפויות ולפעול בצורה בטוחה וטבעית יותר בסביבות מורכבות ודינמיות שבהן בני אדם חיים ועובדים.
ציטוט: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
מילות מפתח: עור מלאכותי, חישה מישושית, רשתות נוירונים קופצות, חומרה נאורומורפית, בטיחות ברובוטיקה