Clear Sky Science · he
אימון חיישני מגע ללמוד חישה של כוח זה מזה
רובוטים שיכולים להרגיש ולשתף את תחושת המגע שלהם
כשרובוטים יוצאים מהמפעלים ונכנסים לבתים, לבתי חולים ולמחסנים, הם צריכים חוש שאנחנו בדרך כלל לוקחים כמובן מאליו: מגע. בדיוק כמו שאצבעותינו מסתגלות באופן אוטומטי כשאנו מחזיקים שבובת צ'יפס לעומת קופסה כבדה, על רובוטים עתידיים ללמוד כמה חזק ללחוץ ומתי אובייקט עומד להחליק. מאמר זה מציג דרך חדשה ל"עור" רובוטי ללמוד חישה של כוח מעורות אחרים, מה שמקצר כיול יקר ודוחף מכונות קרוב יותר לדקסטריות דמוית-אדם.
למה מגע רובוטי כל כך קשה להשגה
לרובוטים מודרניים כבר יש סוגים רבים של עור מלאכותי. חלקם משתמשים במצלמות קטנות שמסתכלות לתוך ג'לים רכים, אחרים מסתמכים על מגנטים או רשתות אלקטרוניות שמרגישות לחץ. כל עיצוב מצטיין במשימות מסוימות, אבל כולם "מדברים" בניב שונה של מגע: דחיפה זהה בשני חיישנים יכולה לייצר אותות שונים לגמרי. כיום, כל חיישן חדש בדרך כלל דורש תהליך אימון מייגע עם מדדי כוח מדויקים, שחוזר על עצמו אלפי פעמים. גרוע מכך, חומרים רכים מתיישנים ונשחקים, ולכן כיול יקר זה חייב להיעשות שוב בכל פעם שמחליפים חיישן.
לאמץ רעיון מהמוח האנושי
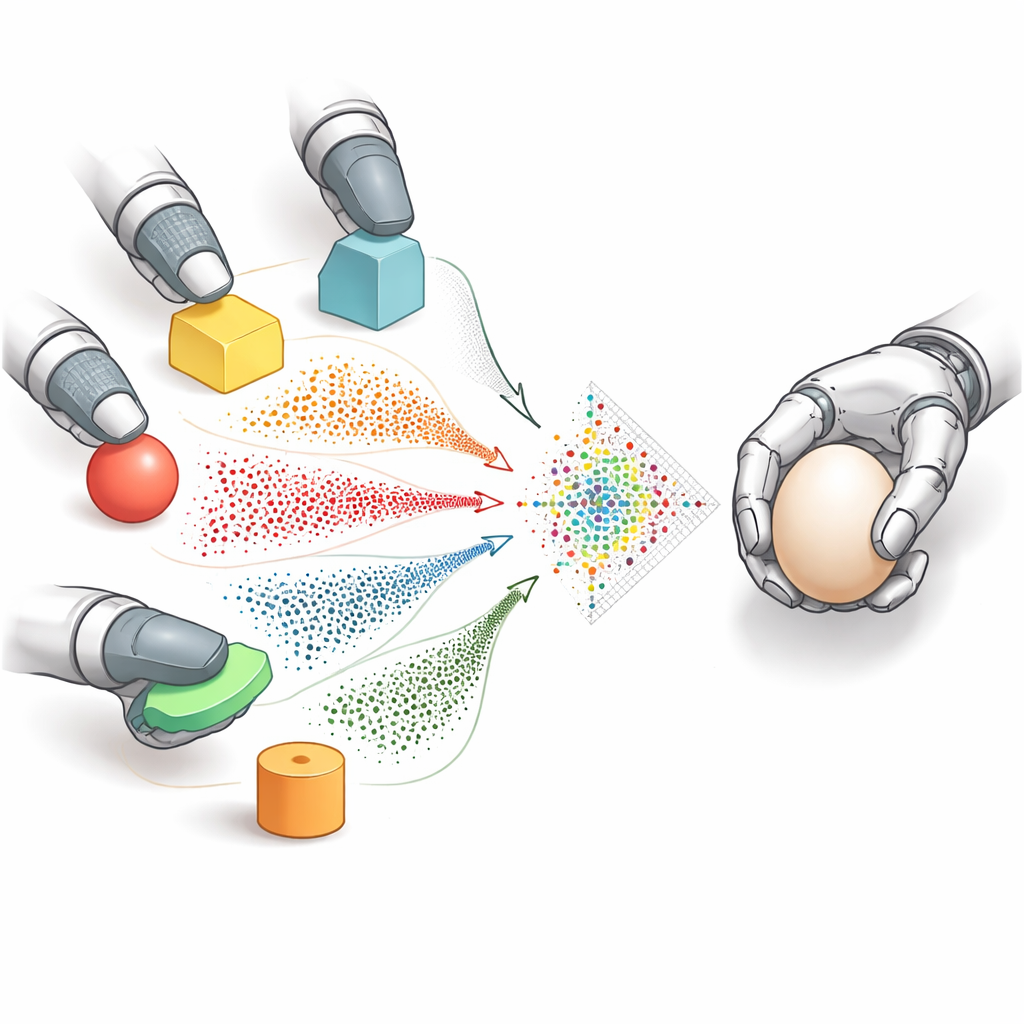
בני אדם פותרים בעיה דומה באופן חסר מאמץ. העור שלנו מלא בסוגים שונים של קולטנים למגע, ובכל זאת המוח ממיר את כל האותות שלהם לקוד פנימי משותף. זיכרון טאקטילי מאוחד זה מאפשר לנו להעריך איך משהו ירגיש בחלק של היד שמעולם לא נגע בו קודם, פשוט על סמך ניסיון עבר. החוקרים מאחורי עבודה זו מחקים את הרעיון ברובוטים. הם ממירים את כל פלטי החיישנים — תמונות מצלמה, קריאות מגנטיות או אותות אלקטרוניים — לצורה משותפת דמוית-תמונה המורכבת מנקודות, שמייצגות את האופן שבו העור מעוות. ייצוג הסמנים המשותף הזה משמש כלשון פשוטה של "שפת מגע" שכל חיישן יכול להשתמש בה.
ללמד חיישן אחד לחקות אחר
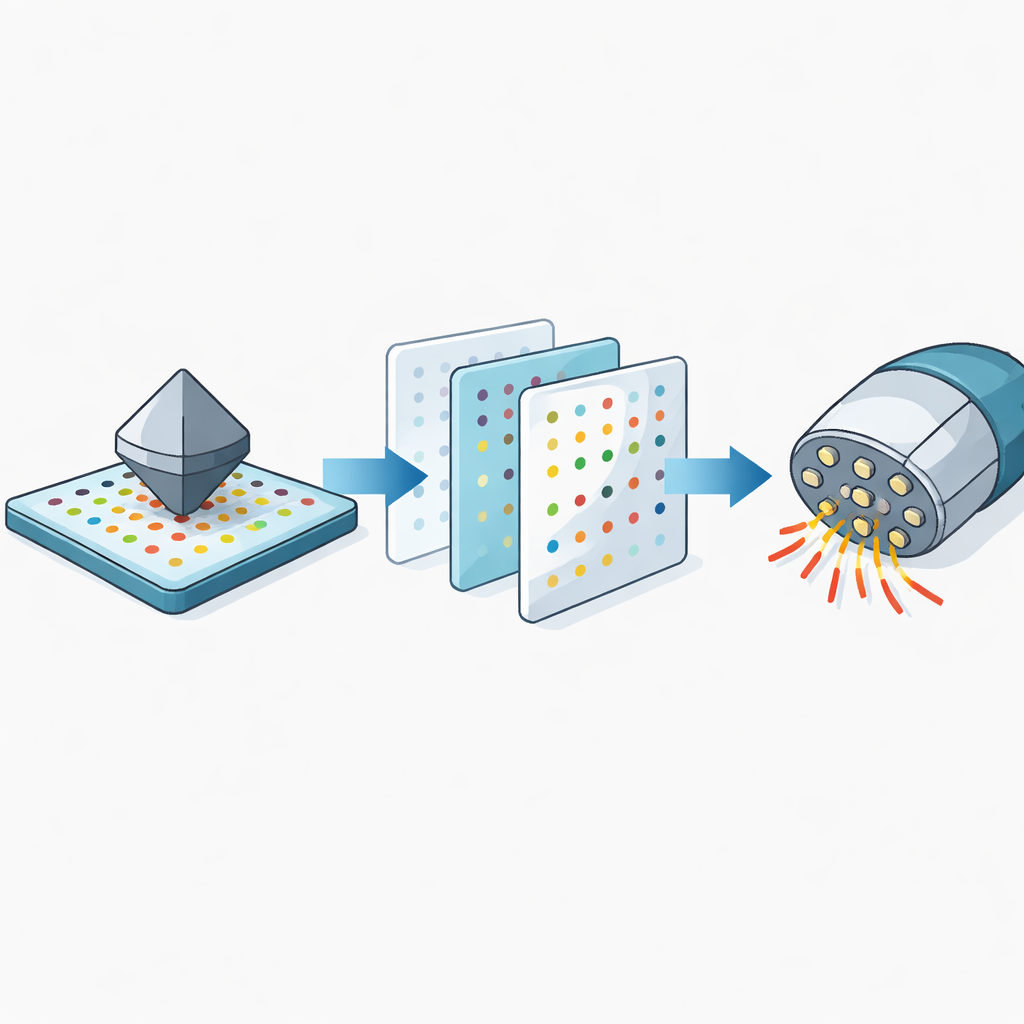
ברגע שכל החיישנים מדברים בשפת נקודות זו, הצוות מציג שלב תרגום הנקרא תרגום מסמן-למסמן. באמצעות מודלים גנרטיביים חזקים, הם מאמנים מערכת שיכולה להפוך את דפוס הנקודות של חיישן אחד לדפוס שחיישן אחר היה מראה תחת אותו מגע. משמעות הדבר היא שחיישן כיול היטב יכול בפועל "לדמיין" מה חיישן שלא כיול היה מרגיש, וליצור עבורו נתוני אימון סינתטיים. מודל שני ואז בוחן רצפים קצרים של תמונות הנקודות האלה כדי לחזות כיצד הכוחות משתנים לאורך הזמן בשלוש הכוונות, ומתחשב הן בדחיפה והן בשיחוק הצידי.
התמודדות עם הבדלים בעולם האמיתי בעור רך
במעשה, עור רובוטי שונה לא רק בצורה ובחיבורים; הוא גם עשוי מחומרים שיכולים להיות רכים או קשיחים יותר, ומשתנים עם הזמן. הבדלים אלה יכולים לעוות הערכות כוח גם אם הדפוסים נראים דומים. החוקרים מדדו כיצד כל סוג חומר רך מתעקל תחת עומס ובנו שלב פיצוי פשוט שמקנה או מקטין את תוויות הכוח לפני האימון. פיצוי החומר הזה מקטין משמעותית שגיאות, במיוחד בעת העברת ידע בין עור רך מאוד לעור קשיח מאוד.
ממש השולחן במעבדה למניפולציה יומיומית
הצוות בודק את שיטתם, שנקראת GenForce, על תערובת רחבה של חיישנים, החל ממספר עותקים של אותו כרית מבוססת-מצלמה ועד עיצובים מאוד שונים המשתמשים במגנטים או בצורות מעוקלות בדמות קצה אצבע. ביותר מ־200 שילובים בסימולציה ובחומרה, GenForce מקטין בחדות את שגיאות החיזוי בהשוואה לשימוש חוזר פשוט במודל שאומן על חיישן אחר. בהדגמות, יד רובוטית המצוידת בעורות מגע שונים על כל אצבע משתמשת במודלים מועברים כדי לאחוז בעדינות פריטים שבירים כמו פירות ושבבי תפוח־אדמה, ולזהות ולתקן החלקה של עצמים על ידי תיאום קריאות משני צדי האחיזה.
מה זה אומר לעתיד של ידיים רובוטיות
על ידי כך שחיישני מגע ילמדו חישה של כוח זה מזה במקום להתחיל מאפס, GenForce מצביע על ידיים רובוטיות שקל יותר וזול יותר לפרוס בקנה מידה. חיישן יחיד כיול בקפידה יכול לאמן רבים אחרים, אפילו בעיצובים שונים, ודגמים מאומנים מראש יכולים לכוייל מחדש בכמות קטנה של נתונים חדשים. עבור שאינם מומחים, הסיכום פשוט: עבודה זו הופכת את היכולת של רובוטים להרגיש כמה חזק הם לוחצים ולהגיב מהר כאשר עצמים מתחילים להחליק לפרקטית יותר, ומקרבת אותנו למכונות שטוענות להתמודד עם העולם האמיתי במגע בטוח כמו ידיים אנושיות.
ציטוט: Chen, Z., Ou, N., Zhang, X. et al. Training tactile sensors to learn force sensing from each other. Nat Commun 17, 2101 (2026). https://doi.org/10.1038/s41467-026-68753-1
מילות מפתח: מגע רובוטי, חיישני מגע, חישה של כוח, מניפולציה רובוטית, למידת העברה