Clear Sky Science · he
רובוט בקנה מידה של חרק עם רגליים מקבילות המבוסס על מנגנון אוריגמי משולב הנעה‑מבנה
רובוטים קטנים למרחבים צמודים
דמיינו רובוט הצלה קטן וקל דיו כדי לחלוף דרך סדק בקיר, לזחול לאורך צינור צר או אפילו לשחות על פני שלולית מים. המאמר מציג מכונה כזו: רובוט בגודל כף־יד, דמוי חרק, בשם PLioBot, המיוצר מגיליון יחיד מקופל, נע במהירות יחסית לגודלו ומתמודד עם סוגים רבים של שטחים קשים. החוקרים מראים כיצד שילוב של קיפולים חכמים עם מנועי רטט זעירים יכול להפוך חומרים שטוחים למגלי שטח זריזים למקומות צפופים וקשים להגעה.
מגיליון שטוח לזחל בעל ארבע רגליים
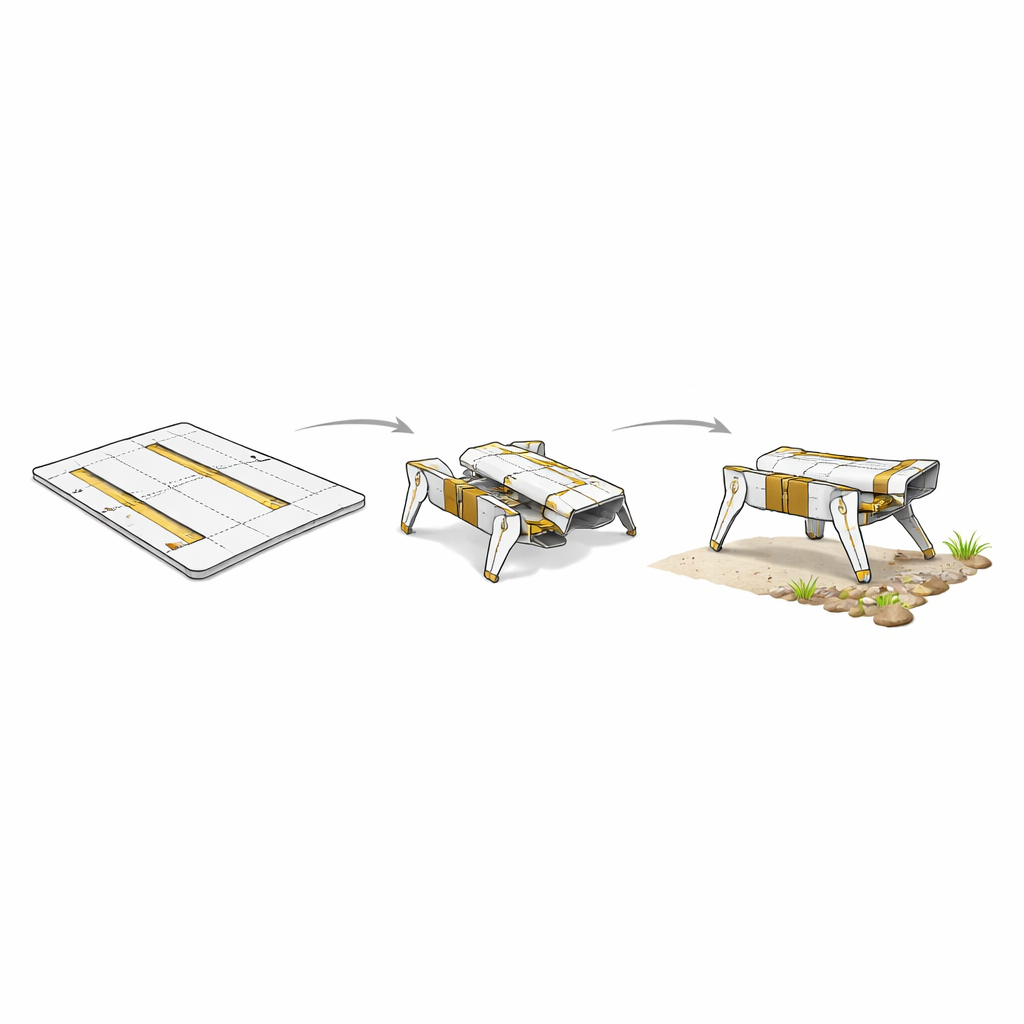
PLioBot מתחיל את חייו כתוּבנית שטוחה, בדומה למשחק נייר שחותכים ומקפלים. במקום נייר, התבנית היא סנדוויץ' חמש־שכבתי של סיבי זכוכית, סיבי פחמן, סרט פלסטיק גמיש ורצועות של קרמיקה פיאזו‑אלקטרית שפועלות כשרירים. אזורים דקים שממוקמים בדיוק בשכבת הפלסטיק משמשים כמפרקים. לאחר חיתוך בלייזר, המבנה כולו מקופל בסדר מתואם כך שהגוף, ארבעת הרגליים וכל שמונה המניעים יוצאים מחתיכה רציפה אחת. אין ברגים, אין מנועים נפרדים ואין יישור ידני — הקיפול בלבד מפיק רובוט שלם באורך כ־2.5 סנטימטרים ומשקל של כ־1.2 גרם.
איך הרגליים הזעירות עושות צעדים גדולים
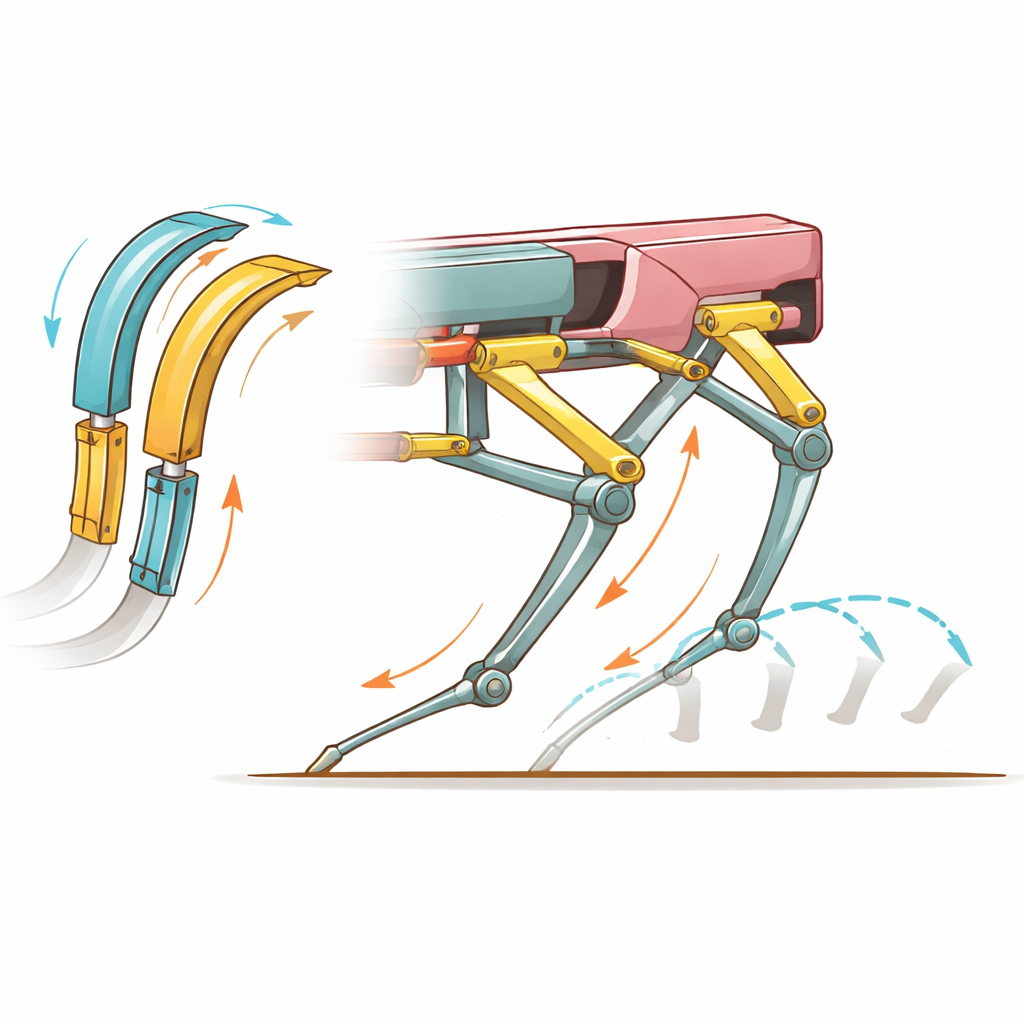
התנועה של הרובוט נובעת מקרמיקה פיאזו‑אלקטרית — חומרים שמתעוותים במקצת כאשר מוטחמת בהם מתח חשמלי. בכל צד של PLioBot ממוקמת זוג רצועות מניע "תאומות". כאשר מתח חלופי גורם לרצועות הללו להתכופף קדימה ואחורה, התנועה מועברת דרך מערכת צירים ומקשרים הפועלים כמנגנון רגל מקביל מיקרוסקופי. באמצעות תזמון מדויק של האותות, כל רגל יכולה לנוע מעלה ומטה וכן קדימה ואחורה, ולעקוב אחרי מסלול לולייני עם כף הרגל. תיאום של כל ארבע הרגליים בתבנית דמוית טרוט מאפשר לרובוט לדחוף נגד הקרקע ביעילות ולהדף קדימה במהירות. בהגדרות הטובות ביותר שלו, PLioBot מגיע למהירות של 44.6 סנטימטר לשנייה — כ־18 אורכי גוף לשנייה — מה שממקם אותו כאחד מהרובוטים בעלי רגליים המהירים בקנה מידה זה.
שרירים משולבים, פחות כאבי הרכבה
רוב רובוטי הקנה־מידה של חרק מורכבים בקפידה מהרבה חלקים זעירים: מנועים או מניעים נפרדים, מסגרות ומקשרים שדורשים יישור ידני. הדבר מגדיל עלויות, מגביל דיוק ומקשה על ייצור המוני. המחברים מתמודדים עם הבעיה בכך שהם משתלבים בצורה מלאה מבנה והנעה למנגנון "אוריגמי" יחיד. הם משתמשים בתהליך למינציה משופר שבו כל השכבות — קליפות קשיחות של סיבי זכוכית, אלקטרודות סיבי פחמן אורטוגונליות, סרט המפרק הגמיש והרצועות הקרמיות — נחתכות, נערמות, מיושרות באמצעות חורי יישור ומודבקות בלחץ חם לפני שהקווי המתאר הסופיים משוחררים בלייזר. התוצאה היא ריק שטוח ועמיד שכבר מכיל את השלד, המפרקים והשרירים של הרובוט במקומם הסופי, מוכן להיקפל לצורה.
הליכה, טיפוס ושחייה בשטחי העולם האמיתי
כדי לבחון אם העיצוב שימושי מעבר לבשורת הניסוי, הצוות הכתיב את PLioBot דרך שורה של מכשולים יומיומיים. על זכוכית חלקה הוא עלול להחליק, אך עדיין נע במהירות; על סבון וציפוי אקרילי הוא מרוויח אחיזה על חשבון קצת מהירות. הוא מטפס במעלות עד 12 מעלות ויכול לסחוב מטענים כבדים ממנו — עד 1.7 גרם, עם ביצועים טובים במיוחד מתחת לכ־0.8 גרם. בתוך צינורות צרים ברוחב של 3 סנטימטרים בלבד ובגובה מתחת ל‑3 סנטימטרים, הרובוט נושא עומס של 1.4 גרם תוך שמירה על מספר אורכי גוף לשנייה. על ידי החלפת משטחים לכף בעלת חצי‑כדור או משוטים בדמות סנפיר, PLioBot חוצה חצץ ודשא, חוצה חולות זזים בלי שקיעה, הולך לאורך קרקעית מיכל ואפילו שוחה על פני המים כשהוא משתמש בלהביאיו בלבד לדחף.
מה המשמעות לעתיד של חוקרים זעירים
במילים פשוטות, העבודה הזו מראה שאפשר להדפיס ולקפל רובוט זעיר מאוד שהגוף והשרירים שלו הם חתיכה אחת, ושזה רובוט שיכול לנוע במהירות ולהתמודד עם משטחים מלוכלכים ומציאותיים רבים. PLioBot עדיין תלוי בחוטי הספק חיצוניים, ולכן אינו עצמאי לחלוטין כיום. אולם העיצוב האוריגמי המשולב ושיטת הייצור מצביעים לעבר עתיד שבו כמויות גדולות של רובוטים זולים בקנה־מידה של חרק יוכלו להיות מיוצרות כחלקים שטוחים, מקופלות לצורה וציודוֹת בסוללות זעירות ומעגלי בקרה. עדרים כאלה עשויים יום אחד לסייר בבניינים פגועים, לבדוק צינורות תעשייתיים או לחקור כוכבי לכת אחרים — והכל מתחיל ממש בחתיכה שנראית, בתחילה, כמו גיליון שחתכו בחוכמה.
ציטוט: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
מילות מפתח: רובוטים בקנה מידה של חרק, רובוטיקה אוריגמית, מניעים פיאזו‑אלקטריים, ניידות מסתגלת לשטח, ייצור מיקרו‑רובוטים