Clear Sky Science · he
מערכת רובוטית להעברת תאים המבוססת על דוגמנות ההתנגדות של מיקרו־פיקונט
להזיז תאים זעירים בלי מיקרוסקופ
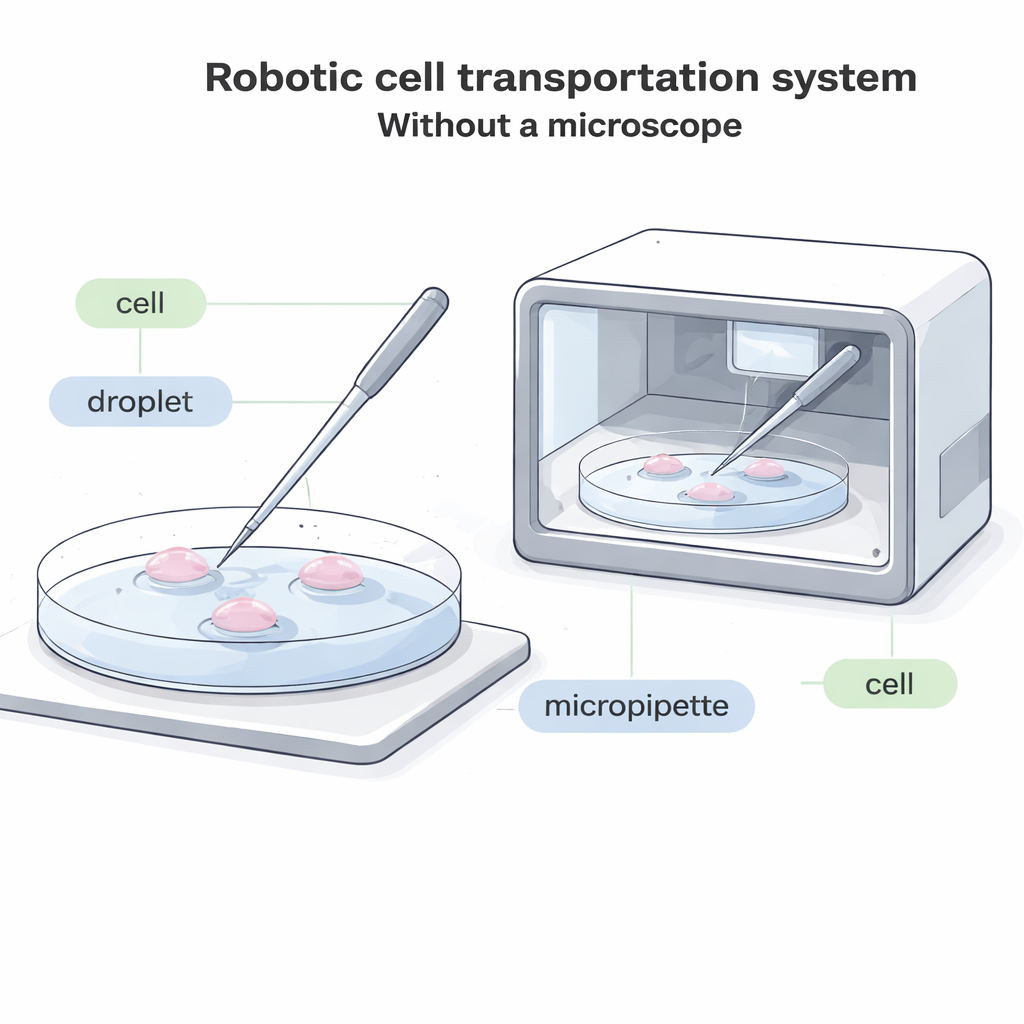
ביולוגיה מודרנית לעיתים תלויה במשימה מפתיעה בפשטותה: להרים תא יחיד בעזרת צינור זכוכית ולמקם אותו במקום אחר. זה חיוני לטיפולי פוריות, הקפאת עוברים, טיפולים מבוססי־תאים ולמחקר בסיסי. אך כיום זה כמעט תמיד דורש מיקרוסקופ כבד ומפעיל אנושי מיומן הצופה בכל תנועה. מאמר זה מתאר מערכת רובוטית חדשה שיכולה להעביר תאים בודדים בין טיפות נוזל ללא תצפית מיקרוסקופית כלל, ובכך לפתוח אפשרות ל"מפעלי תאים" סגורים ואוטומטיים שעובדים מהר יותר, בזול יותר ופוגעים פחות בתאים עדינים.
למה העברת תאים צריכה חידוש
במעבדות כיום, מפעיל מסתכל דרך מיקרוסקופ ומשתמש בצינור זכוכית דק, שנקרא מיקרו־פיקונט, כדי לנחות על תחתית הכלי, לשאוב בעדינות תא בודד, להעבירו לטיפת נוזל אחרת ואז להוציאו. התהליך איטי, תובעני מבחינה ויזואלית וקשה לאוטומציה. במערכות עתידיות רבות—כמו מכשירים קומפקטיים וסגורים שמגדלים עוברים או תאים בתוך תיבה—פשוט אין מקום למיקרוסקופ מסורתי. במקרים אחרים תאים מסומנים בצבעים זוהרים שיכולים לדעוך או להינזק מאור, ולכן חשוב לצמצם תצפיות מיקרוסקופיות בהירות. מערכות "עיוורות" קיימות שאינן מסתמכות על תמונה עובדות רק עבור תאים יוצאי דופן בגודלם, ומשאירות את רוב סוגי התאים ללא פתרון אוטומטי טוב.
קשית מיוחדת עם "עצירה" פנימית
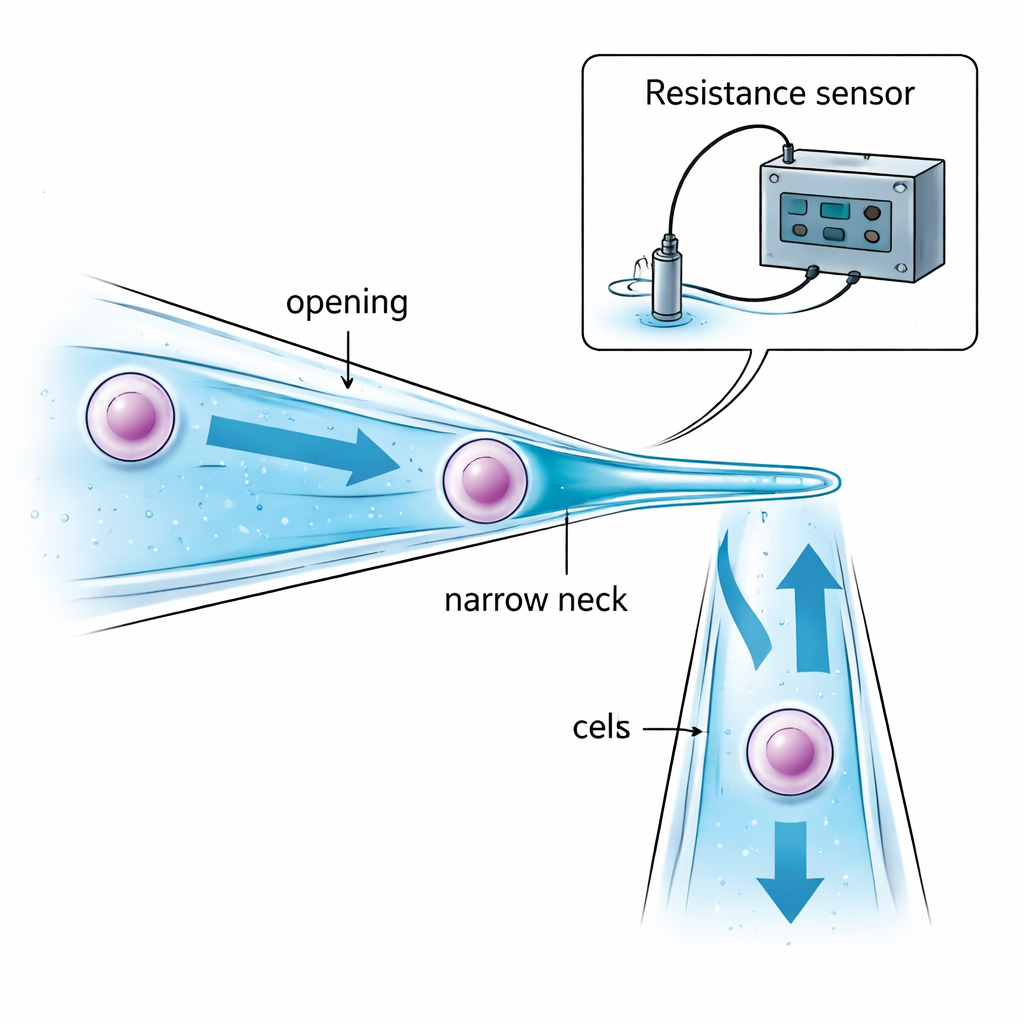
המחברים ניגשו לבעיה על ידי עיצוב מחדש של המיקרו־פיקונט עצמו. במקום צינור זכוכית ישר עם קוטר אחיד, הם יוצרים פיקונט צר־צוואר. הפתח שלו מעט רחב יותר מהתא המיועד כך שהתא יוכל להימשך פנימה. עמוק יותר, הצינור מצטמצם בעדינות ל"צוואר" שקוטרו קטן יותר מהתא. כאשר שאיבה מושכת את התא לכיוון ההיצרות, התא נעצר ומוחזק בתוך הצינור—במקום להיות תלוי בקצה ולהיחשף לשמן או לאוויר בין הטיפות. בחירה מדויקת של גודל הפתח, גודל הצוואר והמרחק ביניהם מבטיחה שהתא ייתפס בצורה בטוחה בלי לעופו מדי, ושכמות קטנה בלבד של נוזל תישא מטיפה לטיפה, מה שמקטין זיהום.
להקשיב לאותות חשמליים במקום להביט
בלי מיקרוסקופ, הרובוט עדיין צריך לדעת שלוש נקודות: מתי קצה הזכוכית קרוב מספיק לתחתית הכלי, מתי התא נתפס בהצלחה בצוואר, ומתי הוא שוחרר לחלוטין לטיפה החדשה. הצוות פותר זאת על ידי ניטור שינויים זעירים בהתנגדות החשמלית בנוזל בתוך ומסביב לפיקונט. כשהפיקונט נטוי מתקרב לתחתית הכלי, המרווח הנוזלי ביניהם קטן וההתנגדות החשמלית עולה בצורה צפויה, ומסמנת נחיתה בטוחה רגע לפני מגע. כאשר תא חוסם את הצוואר הצר, הנתיב החשמלי דרך הנוזל מצטמצם וההתנגדות קופצת באופן פתאומי; כשהתא נדחף החוצה, ההתנגדות יורדת באותה חדות. מודלים מתמטיים של ההתנגדויות האלה—"מרווח", "שאיבה" ו"הזרקה"—מאפשרים למחשב לפרש אותות אלו בזמן אמת ולהחליט מתי להפסיק שאיבה או ללחוץ, הכל ללא משוב חזותי.
מבחן הרובוט
כדי לבדוק האם הגישה עובדת בפועל, החוקרים בנו מערכת רובוטית מלאה שמשלבת בקרת תנועה, בקרת לחץ, חישת התנגדות ומחשב מארח. הם בדקו אותה על תאי סרטן קטנים הידועים כ־HeLa (כ־10 מיקרומטר בקוטר) ועל תאי ביצית חזיר much גדולים יותר (כ־150 מיקרומטר). המערכת יכלה לזהות באופן מהימן נחיתה, תפיסה ושחרור אך ורק מתוך אותות התנגדות על טווח רחב של גדלי פיקונט. בהשוואות ישירות, הרובוט העביר תאי HeLa בהצלחה של 90 אחוז—טוב יותר משיטה אוטומטית קודמת מבוססת־חזון—והעביר ביציות חזיר בשיעור הצלחה של 95 אחוז, גבוה מהגישה המיקרוסקופית הסטנדרטית. זמני פעולה לכל תא היו דומים או מהירים יותר משיטות בבקרה אנושית, בעיקר כי הצוואר הצר מפחית את הצורך בכיוונון חוזר של השאיבה למיקום התא.
שימור חיים של תאים והגדלה בקנה מידה
כל עוזר רובוטי במעבדה חייב להימנע מלפגוע בתאים שהוא מטפל בהם. לאחר העברה באמצעות המערכת החדשה, הן תאי HeLa והן ביציות חזיר הושתוּ וצבעוּ לאחר יום בצבע שמזהה תאים חיים בלבד. שיעורי השרידות בשיטה החדשה התאימו או התקרבו לאלה של העברה מונחית מיקרוסקופ ושל תאים שלא נתערבו, מה שמעיד שהלחיצה המכנית העדינה בצוואר לא מפחיתה באופן בולט את חיי התא כאשר סף הלחץ נקבע נכון. במבט קדימה, המחברים מציעים שאותה חישה מבוססת התנגדות ובלימת לחצים ניתנת לשילוב בשבבים מיקרו־פלווידיים קומפקטיים. כך ניתן שורות רבות של ערוצים יעבדו במקביל, מה שמאפשר טיפול תאי בקיבולת גבוהה, סגור לחלוטין, המותאם לרפואה הרבייתית האוטומטית, טיפולי תאים ומכשירי תרבית תאים לטווח ארוך שבהם אין מקום למיקרוסקופים.
מה משמעות הדבר לעבודה העתידית עם תאים
עבור לא־מומחים, המסר העיקרי הוא שהעברת תאים בודדים כבר לא חייבת להסתמך על אדם הצופה דרך מיקרוסקופ. על ידי עיצוב מדויק של צינור זכוכית ו"האזנה" לזרימת החשמל דרך הנוזל הסובב, רובוט יכול להרגיש מתי נחת, תפס תא ומתי שחרר אותו—כל זאת בחושך ובמרחבים צרים. הדבר מקל מאוד על עיצוב מערכות תרבית תאים סגורות, עצמאיות, המגנות על דגימות עדינות, מפשטות תהליכים קליניים ומקרבת את עבודת המיקרוסקופ המעבדתית לפעילות אוטומטית בדמות מפעל.
ציטוט: Zhao, Q., Liu, M., Zhu, R. et al. Robotic cell transportation system based on micropipette resistance modeling. Microsyst Nanoeng 12, 65 (2026). https://doi.org/10.1038/s41378-026-01193-5
מילות מפתח: טיפול בתאים, מיקרו־פיקונט, רובוטיקה, מיקרו־פלווידיקה, אוטומציה