Clear Sky Science · he
מפעילים מסגסוגת זיכרון צורה בצורת חוט: תימוד, עיצוב ובקרה
חוטי מתכת ש"זוכרים" את צורתם
דמיינו חוט מתכתי דק שיכול למשוך כמו שריר, לכופף שקט את האצבע של רובוט, לעצב מחדש כנף מטוס בטיסה או ללחוץ בעדינות על לב נכשל — וכל זאת על ידי חימום וקירור פשוטים. מאמר סקירה זה בוחן חוטים כאלה, עשויים מסגסוגות זיכרון צורה (SMA), ומסביר כיצד הם פועלים, כיצד מהנדסים מעצבים ובוקרים אותם, והיכן הם כבר נמצאים בשימוש בעולם האמיתי ברובוטיקה, תעופה, מכשור רפואי וטכנולוגיה לבישה.
כיצד חוטי מתכת חכמים מתעוררים לחיים
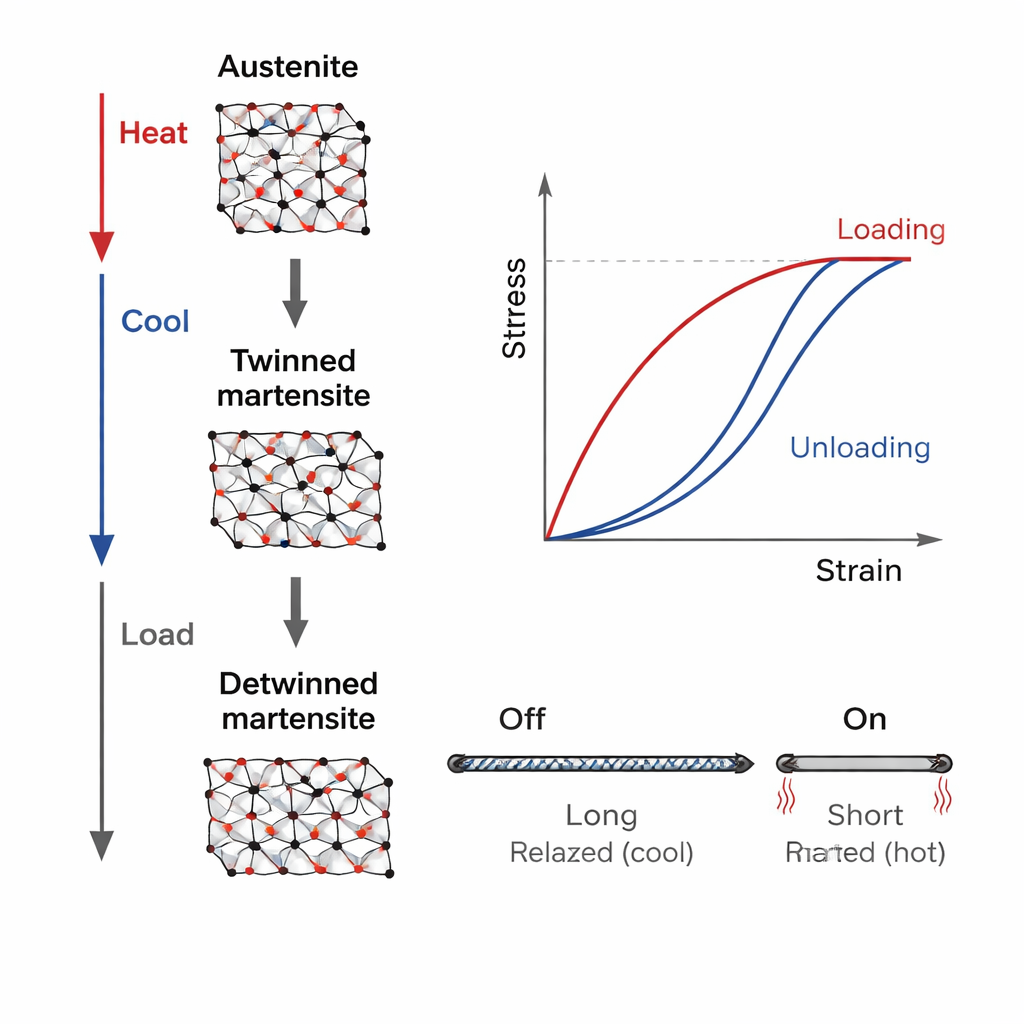
סגסוגות זיכרון צורה הן מתכות מיוחדות שניתן לעוות אותן ואז להחזירן לצורה שקבעו מראש כאשר הטמפרטורה משתנה. במצב אחד, הקרוי אפקט זיכרון הצורה, ניתן לכופף את החוט כשהוא קר יחסית ורך; בחימום הוא חוזר במהירות לצורתו המקורית. במצב אחר, על־אלסטיות, הסגסוגת יכולה להתמתח תחת עומס ואז לקפוץ חזרה כשהעומס מוסר. ההתנהגות הזו נובעת משינויים פאזיים מוצקים–מוצקים בסידורי הגביש השונים בתוך המתכת, מה שהופך את תגובתה ללא ליניארית ומעט קשה לחיזוי. מאחר שחוטי SMA דקים, מהנדסים בדרך כלל מטפלים בהם כאיברים ממד‑אחד, מה שמפשט מודלים מתמטיים שמתארים כיצד טמפרטורה, מאמץ, עיוות וזרם חשמלי מקושרים.
ממשוואות למודלים מבוססי נתונים
כדי להשתמש בחוטים החכמים האלה באופן אמין, המעצבים זקוקים למודלים שמנבאים כמה חזק הם יכולים למשוך, כמה הם נעים, כמה הם מתחממים וכיצד ההתנגדות החשמלית שלהם משתנה. מודלים קלאסיים "חוקתיים" מטפלים בחוט כחומר מסתורי ועוקבים כיצד הפאזות הפנימיות משתנות עם מאמץ וטמפרטורה. מודלים אלה יעילים אך תלויים בהנחות מפשטות. במקביל, חוקרים עושים שימוש הולך וגובר בלמידת מכונה וברשתות עצביות כדי ללמוד את התנהגות החוט ישירות מנתוני ניסוי, וללכוד היסטרזיס והשפעות היסטוריות עדינות. קו עבודה חשוב נוסף בוחן כיצד ההתנגדות החשמלית והטמפרטורה של החוט מתפתחות במהלך חימום מונע זרם, ומאפשרות חישת‑עצמית — היכולת לאמוד כוח או תנועה רק על ידי מדידת ההתנגדות במקום להוסיף חיישנים נפרדים.
בניית תנועה: עומסים פשוטים, מבנים רכים ושרירים מלאכותיים
בצד החומרה, המאמר מארגן מפעילי SMA מבוססי חוט לפי אופן העמסתם. בהגדרות ה"עומס ליניארי" הפשוטות ביותר, חוט מושך נגד קפיץ או משקל כדי להניע מהדקים או מנגנוני שחרור לחלל. מערכות "עומס לא ליניארי" מתקדמות יותר משבצות חוטים לקרני גמישות, פולימרים רכים, טקסטילים או מבנים בסגנון אוריגמי להשגת תנועות כיפוף גדולות, רובוטים זוחלים וכפפות חיצוניות ארוגות. תצורות דיפרנציאליות משתמשות בשני חוטים או יותר נגדיים, המדמות זוגות שרירים כמו ביספס וטריספס, כדי לספק תנועה מהירה והפיכה במפרקים כגון מרפקים וקרסולות מלאכותיים. מאחר שחוט SMA יכול לקצר רק בכ־8% בערך, נושא מרכזי בעיצוב הוא הגדלת מהלך: ליפוף חוטים ארוכים סביב גלגלת, סידורם בנתיבים מעוקלים, שימוש בשלבי החלקה או סיבוב מודולריים, או אימוץ קפיצי SMA כדי להשיג תנועות גדולות בחללים צפופים.
להדריך את החוטים החכמים לציית
בקרה על מפעילים אלה מאתגרת כי תגובתם תלויה הן בטמפרטורה והן בהיסטוריה מכנית. המאמר מבקר מבחר אסטרטגיות בקרה, ממחברי PID קלאסיים ועד סכמות מתוחכמות יותר. גישות מבוססות מודל משתמשות במשוואות נגזרות פיזיקליות או במודלים של היסטרזיס כדי לעצב בקרים במצב החלקה ומפצות הזנה־קדימה שמנטרלות את אי‑הליניאריות. בקרים מבוססי רשתות עצביות ולמידת חיזוק הולכים צעד נוסף ומלמדים כיצד לנהג את החוט לתנועה מדויקת מבלי להסתמך על מודלים מושלמים. במקביל, שיטות בקרה עם חישת‑עצמית משתמשות בשינוי ההתנגדות של החוט כאות משוב מובנה, לעתים בשילוב עם רשתות עצביות, כדי לאמוד מיקום או כוח ללא חיישנים חיצוניים מגושמים.
שימושים בעולם האמיתי וכיוונים עתידיים
מפעילי SMA בצורת חוט כבר מספקים כוח למתפסים רובוטיים רכים, רובוטים זוחלים זעירים, כנפי מטוס משתנות, מנגנוני שחרור ללווין, משאבות ומחטי‡ים (stents) ניתנים להשתלה, עטיפות לסיוע ללב, בגדי דחיסה, חליפות אקסוסקלטון וכפפות לשיקום. בכל התחומים הללו נשארים אתגרים משותפים: קירור איטי והצטברות חום, שחיקה אחרי מחזורים רבים, מורכבות הבקרה ועלות הייצור. המחברים טוענים שההתקדמות תסתמך על שילוב של שלושה חוטים: מודלים טובים יותר מרובי־סקלות ומועשרים בנתונים, עיצובים מבניים חכמים שמשלבים SMA עם אלקטרוניקה גמישה וחומרים רב-תכליתיים, ואסטרטגיות בקרה אינטליגנטיות שמתאימות אונליין. הם מדמיינים מסגרות מאוחדות של "תימוד–עיצוב–בקרה", נתמכות על ידי תאומים דיגיטליים ולמידת מכונה, שיכולות לאופטימיזציה משולבת של ההיבטים הללו. עבור הקורא הכללי, המסר הוא שחוטים משתנים אלה מתפתחים מסקרנות מעבדתית לשרירים מלאכותיים פרקטיים, עם פוטנציאל לעצב בשקט מכונות, מכשירים רפואיים ומערכות לבישות בשנים הקרובות.
ציטוט: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
מילות מפתח: מסגסוגת זיכרון צורה, רובוטיקה רכה, מפעילים חכמים, מבנים משתנים, מכשירים לבישים