Clear Sky Science · he
ניתוח שגיאת פאזה עבור מצבי פעולה של ג'יירוסקופים MEMS מבוסס מדידת מצב כוח-לשיקום
למה ג'יירוסקופים זעירים חשובים
מתייצוב רחפנים ועד הנחיית רכבים אוטונומיים, חיישני תנועה זעירים המכונים ג'יירוסקופי MEMS שומרים באופן שקט על שיווי המשקל וכיוון המכשירים המודרניים. כדי למדוד סיבוב בדיוק, השבבים הללו מסתמכים על לולאות בקרה אלקטרוניות מתוזמנות בקפידה. מאמר זה בוחן כיצד התאמות זעירות בזמן — המכונות שגיאות פאזה — בתוך לולאות אלה יכולות להרע את הביצועים, ומראה אילו מהשגיאות הללו באמת חשובות וכיצד לתקן אותן כדי שהג'יירוסקופים יישארו מדויקים ואמינים.
שתי תנודות שמרגישות סיבוב
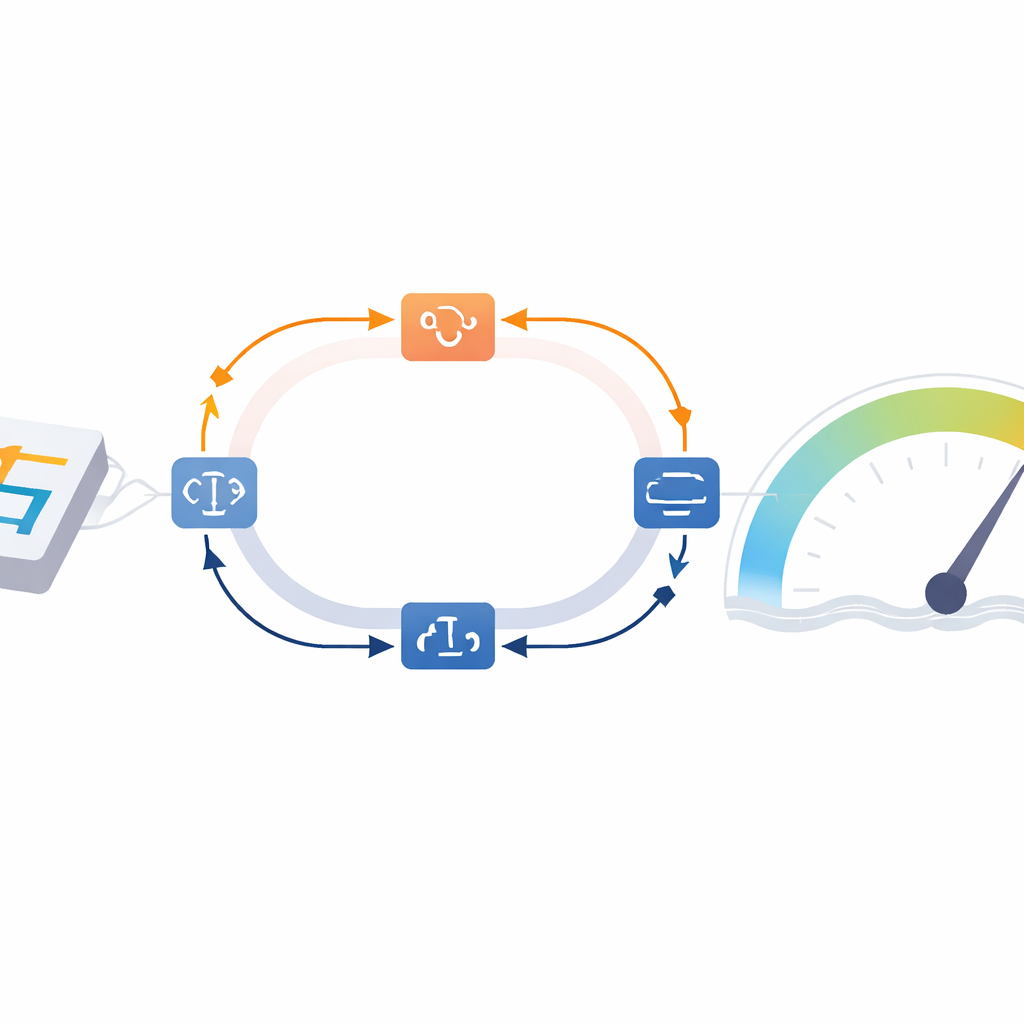
ג'יירוסקופ MEMS פועל על ידי הרטט של מבנה סיליקון קטנטן בשתי כיוונים מאונכים: מצב נהיגה שמרעידים אותו באופן פעיל, ומצב חישה שמרגיש את הדחיפה הצידית שנוצרת כאשר המכשיר מסתובב. אלקטרוניקה שומרת על רמת הרטט וקולטת את התנועה המיקרוסקופית של מצב החישה כדי להפיק מדידת קצב. ברבים מהג'יירוסקופים המתקדמים משתמשים בשיטה הנקראת כוח-לשיקום (FTR): במקום להרשות למבנה החישה לנוע בחופשיות, האלקטרוניקה דוחפת בחזרה בדיוק במידה כדי לבטל את תנועתו. כמות הכוח המתוקן מגלה את קצב הסיבוב. גישה זו מוערכת בגלל היציבות שלה, אך היא תלויה מאוד בתזמון מדויק בין האותות.
איפה התזמון מוחלף לשגיאה
במכשירים אמיתיים, האותות חייבים לעבור דרך מעגלים אנלוגיים שממירים שינוי קיבול למתח, עיבוד דיגיטלי בתוך שבב FPGA וממירים שמגשרים בין העולמות האנלוגי והדיגיטלי. כל אחד מהשלבים הללו יכול להזיז את הפאזה, או את התזמון של האותות, בזווית זעירה. המחברים מקבצים את שגיאות הפאזה הללו לשתי קטגוריות פשוטות בכל מסלול הרטט: אלה שמתרחשות בזמן מדידה ועיבוד האותות (מסלול המשוב) ואלה שמתרחשות בזמן יצירת אותות ההנעה (המסלול הקדמי). לאחר מכן הם בונים מודל מתמטי מלא של לולאות הבקרה FTR, כולל שני המסלולים בשני המצבים, ומנתחים כיצד שגיאות כאלה משפיעות על מדדי ביצוע מפתח כמו היסט, גורם קנה מידה, רוחב פס והיכולת לנטרל כיווץ בלתי רצוי, המוכר כשגיאת ריבועיות (quadrature).
בדיקת צד הנהיגה: בעיקר לא מזיק
בצד הנהיגה, שגיאות פאזה גורמות ללולאת הבקרה להנעל מעט הרחק מתדירות התהודה הטבעית האמיתית של המבנה. כדי לשמור על רמת הרטט קבועה, האלקטרוניקה מגיבה בהגברת אמפליטודת ההנעה. באופן אינטואיטיבי, זה עשוי להבהיל, שכן הנעה חזקה יותר יכולה לחלחל למסלול החישה כדליפה אלקטרית. עם זאת, הג'יירוסקופ הנחקר כאן משתמש בחזית-קלט מעוצבת בקפידה עם נשא בתדר גבוה ודיאודות טבעת שמדכאות במידה רבה את הדליפה הזו. סימולציות וניסויים מפורטים בשלוש טמפרטורות מראים כי, לאחר שהמכשיר חומם, שגיאות פאזה בלולאת הנהיגה מתייצבות לערכים כמעט קבועים ואחרי כיול פשוט יש להן השפעה זניחה על היסט, רעש, תיקון ריבועיות או רוחב פס FTR.
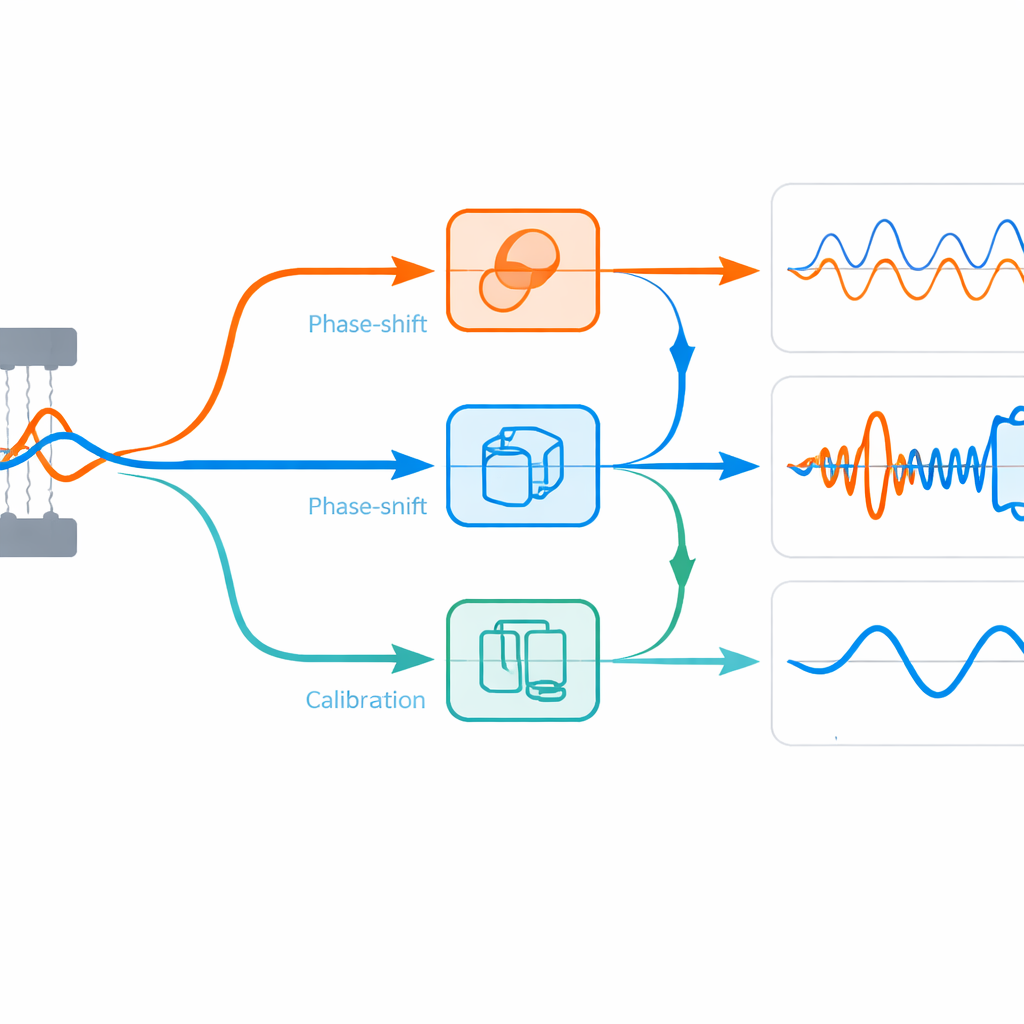
תזמון בצד החישה: הגורם הבעייתי האמיתי
מצב החישה מספר סיפור שונה. כאן האות המשוב שמדחף בחזרה על המסה הרוטטת ואת אותות ההתייחסות המשמשים לחילוץ רכיבי הקצב והריבועיות חייבים להיות מיושרים באופן הדוק. המחברים גוזרים מודל לולאת FTR שכולל במפורש שגיאת פאזה במסלול המשוב של החישה ואחרת במסלול הדמוציה הקדמי. הם מראים אנליטית ואחר כך ניסויית כי שגיאת המסלול המשובי משנה ישירות את גורם הקנה מידה — ההמרה בין הסיבוב האמיתי לפלט המדוד — ומחריפה את פלט האפס, שאמור להיות יציב בצורה אידיאלית כאשר הג'יירוסקופ במצב מנוחה. לעומת זאת, שגיאת המסלול הקדמי משפיעה רק באופן מזערי על התכונות הסטטיות האלה, ושתי שגיאות צד החישה משפיעות מעט על רוחב הפס הדינמי.
כיול של מה שחשוב ביותר
בהתבסס על תובנות אלה, הצוות מציע פרוצדורות כיול מעשיות. עבור מצב הנהיגה, הם מודדים הבדלים פאזה בין גלי התייחסות פנימיים לאות הנהיגה בפועל, ואז מכוונים פאזות דיגיטליות עד שהאותים הופכים לאורתוגונליים ואמפליטודת ההנעה יורדת למינימום, חושפת ומבטלת הן את שגיאות המסלול הקדמי והן את שגיאות המסלול המשובי. עבור מצב החישה, הם מיישרים קודם את אות המשוב עם התייחסות כדי לתקן את שגיאת המסלול המשובי הקריטית. לאחר מכן מגבירים בכוונה את אות הריבועיות כך שהפאזה שלו ת domínio — מה שהופך את כוונון שגיאת המסלול הקדמי לשלב המשני לפשוט. בדיקות בטמפרטורות שונות מראות שהתיקונים הללו מתנהגים כהטיות קבועות שיש להעריך מחדש כאשר התנאים משתנים, אך לאחר שהוגדרו, הם מייצבים במידה רבה את גורם הקנה מידה ואת ההיסט.
מה משמעות הדבר עבור חיישנים עתידיים
במילים פשוטות, המחקר מראה שלא כל שגיאות התזמון בג'יירוסקופ MEMS חשובות באותה מידה. עם דיכוי דליפה מדויק, שגיאות פאזה בלולאת הנהיגה ובנתיב הקדמי של החישה משפיעות מעט על קריאת הסיבוב הסופית. העבריין הדומיננטי הוא שגיאת הפאזה במסלול המשוב של החישה, שמכשילה ישירות את ה"סרגל" המשמש למדידת הסיבוב ומשנה את הקריאה במנוחה. על ידי איתור חוליה חלשה זו והצעת אסטרטגיות כיול ממוקדות, העבודה מספקת מפת דרכים לתכנון ג'יירוסקופים עם יציבות טובה יותר בזמן ריצה ומפנה את הדרך לסכמות פיצוי בזמן אמת היכולות לשמור על דיוק גם כאשר הטמפרטורה ותנאים אחרים משתנים.
ציטוט: Jia, J., Zhang, H., Gao, S. et al. Phase error analysis for MEMS gyroscopes operational modes based on force-to-rebalance rate measurement mode. Microsyst Nanoeng 12, 86 (2026). https://doi.org/10.1038/s41378-025-01144-6
מילות מפתח: ג'יירוסקוף MEMS, בקרת כוח-לשיקום, שגיאת פאזה, כיול חיישן, ניווט惯לי