Clear Sky Science · fr
Cartographie d'occupation probabiliste inspirée du cerveau avec architectures symboliques vectorielles
Des robots qui voient le monde comme un patchwork
Chaque voiture autonome, robot d'entrepôt ou aspirateur domestique a besoin d'une représentation mentale rapide de son environnement : ce qui est solide, ce qui est libre et ce qui reste inconnu. Cet article présente une nouvelle façon pour les robots de construire cette représentation — appelée carte de grille d'occupation — qui emprunte des idées sur la manière dont les cerveaux pourraient représenter l'information, dans le but de garder les cartes précises tout en les rendant beaucoup plus rapides et économes en calcul.
Transformer des impulsions brutes de capteurs en carte du monde
Les robots utilisent souvent des scanners laser ou d'autres capteurs de distance pour sonder le monde en se déplaçant, collectant des nuages de points indiquant où se trouvent les objets et où l'espace est libre. Une technique classique, la cartographie par grille d'occupation, divise l'environnement en petites cellules, comme des pixels à l'écran, et attribue à chacune une probabilité d'être occupée. Les méthodes traditionnelles traitent cela comme un lourd problème statistique, suivant finement l'incertitude mais consommant beaucoup de temps et de mémoire. Les méthodes récentes basées sur des réseaux de neurones sont plus rapides et peuvent combler les vides, mais elles agissent comme des boîtes noires, sont parfois difficiles à approuver dans des contextes critiques pour la sécurité, et doivent en général être réentraînées pour chaque nouvel environnement.
Une voie médiane inspirée du cerveau
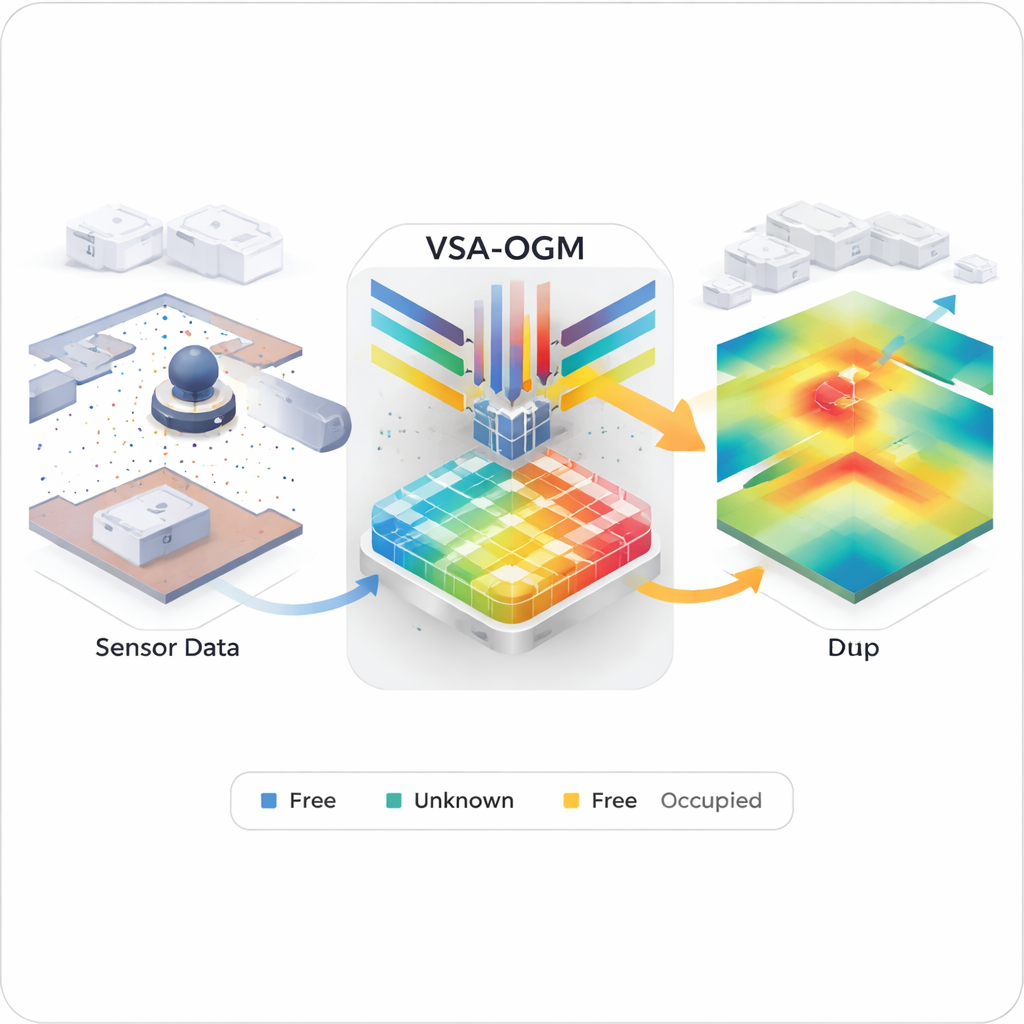
Les auteurs proposent un compromis « neuro-symbolique » appelé VSA-OGM, pour Vector Symbolic Architecture Occupancy Grid Mapping. Plutôt que de stocker chaque détail dans une grille dense ou d'enterrer la structure dans des millions de paramètres de réseau de neurones, la méthode encode les lectures des capteurs sous forme de très longs vecteurs dans un espace de haute dimension — une idée mathématique inspirée des théories sur la manière dont des groupes de neurones pourraient représenter des concepts et des emplacements. L'environnement est découpé en tuiles, et chaque tuile possède des mémoires vectorielles pour les preuves « occupé » et « vide ». Au fur et à mesure que le robot se déplace et collecte des nuages de points, chaque observation est convertie en l'un de ces vecteurs hyperdimensionnels et ajoutée à la mémoire de la tuile correspondante, accumulant efficacement l'information dans le temps.
De vecteurs bruités à des cartes claires
Bien sûr, agréger de nombreux signaux dans une seule mémoire haute dimension risque de créer une masse bruitée et difficile à lire. VSA-OGM traite cela avec un pipeline de décodage soigneusement conçu. D'abord, il compare les mémoires de tuiles à des vecteurs qui représentent des positions dans l'espace, produisant des « quasi-probabibilités » approximatives d'occupation. Ensuite, il applique une série d'étapes non linéaires et un outil de la théorie de l'information, l'entropie de Shannon, pour extraire les endroits où les données soutiennent fortement une classe plutôt qu'une autre. Enfin, il utilise une fonction softmax pour convertir ces signaux en probabilités véritables et les combine en une carte finale montrant la différence signée entre « occupé » et « vide ». Le résultat est une grille d'occupation lissée qui interpole à travers des régions mesurées de manière parcellaire tout en restant pleinement probabiliste et interprétable.
Des cartes plus rapides pour un robot — ou plusieurs
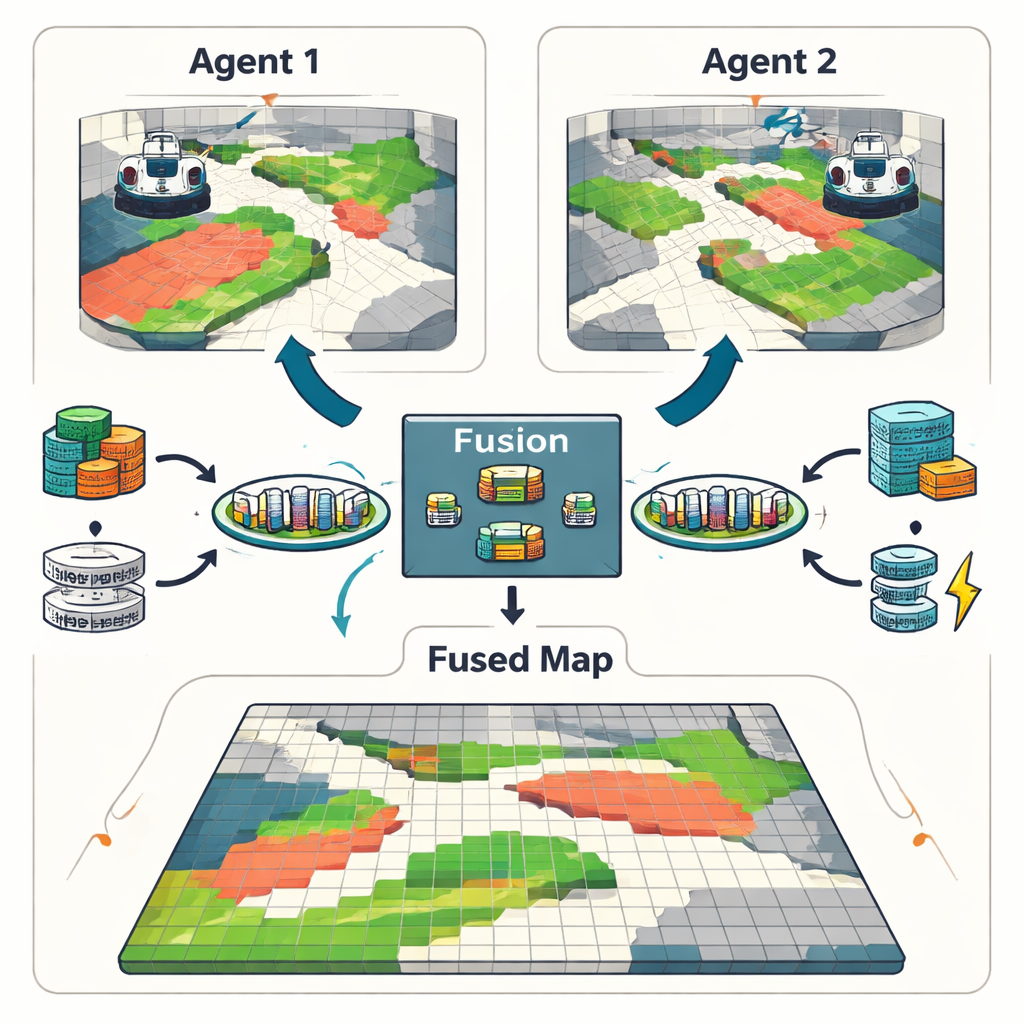
Pour tester leur approche, les chercheurs ont exécuté VSA-OGM sur plusieurs ensembles de données simulés et réels, dont une carte intérieure classique pour robot et un scénario de conduite à grande échelle. Face à de solides références traditionnelles qui modélisent soigneusement les corrélations spatiales, VSA-OGM a obtenu une précision de cartographie similaire tout en utilisant environ 400 fois moins de mémoire et en s'exécutant jusqu'à 45 fois plus rapidement. Comparé à des méthodes traditionnelles allégées qui abandonnent certains détails statistiques, il a toujours atteint la même précision tout en réduisant la latence d'environ un facteur cinq. Évalué par rapport à un système de réseau neuronal nécessitant des heures d'entraînement et des millions de paramètres, VSA-OGM a fourni une qualité de cartographie comparable sans préentraînement et a réduit le temps de traitement par image jusqu'à six fois. Le cadre prend également en charge plusieurs robots : les mémoires vectorielles de différents agents peuvent être simplement additionnées, produisant des cartes fusionnées avec peu de perte d'information.
Ce que cela signifie pour les robots du quotidien
En termes simples, ce travail montre que les robots n'ont pas à choisir entre des mathématiques lentes mais dignes de confiance et des réseaux neuronaux rapides mais opaques pour construire des cartes du monde. En utilisant des vecteurs haute dimension inspirés du cerveau, VSA-OGM conserve la structure probabiliste claire des méthodes classiques tout en atteignant la vitesse et l'efficacité nécessaires pour une opération en temps réel sur du matériel limité. Il reste des défis — comme gérer des données extrêmement inégales et des environnements très denses — mais l'approche ouvre la voie à des robots futurs capables de comprendre leur environnement de manière sûre et fiable, même lorsqu'ils fonctionnent sur des ordinateurs embarqués modestes.
Citation: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Mots-clés: cartographie par grille d'occupation, robots autonomes, architectures symboliques vectorielles, cartographie probabiliste, détection LiDAR