Clear Sky Science · fr
Preuves comportementales de l’exécution hiérarchique des mouvements séquentiels
Comment notre cerveau transforme des gestes simples en actions fluides
Des tâches quotidiennes comme taper au clavier, jouer une gamme au piano ou saisir plusieurs objets sur une table semblent faciles. Pourtant, en coulisses, votre cerveau doit enchaîner de nombreux petits mouvements pour obtenir des actions coordonnées et lisses. Cette étude pose une question apparemment simple : le cerveau planifie-t-il toujours ces enchaînements comme un long mouvement unique, ou les construit-il pas à pas, en s’appuyant sur une hiérarchie cachée de petits blocs de construction ?
Atteindre de grandes cibles sur une table
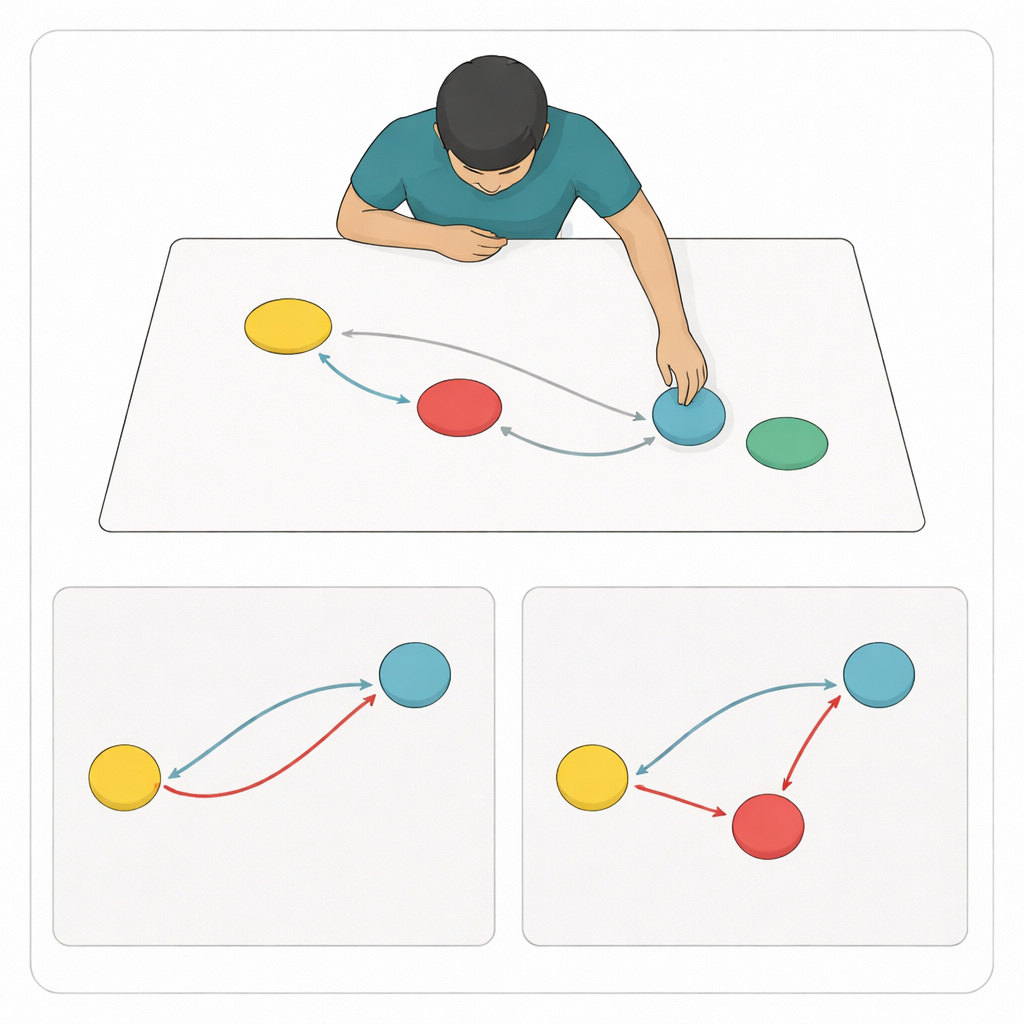
Pour explorer cela, les chercheurs ont conçu un jeu de type « relier les points » pour la main, posé sur une table. Vingt volontaires étaient assis devant une surface imprimée de plusieurs grands cercles colorés. Un cercle de départ était placé près du corps, les autres étant positionnés à gauche, à droite et en hauteur. À chaque essai, les participants entendaient un signal sonore et devaient déplacer la pointe de l’index depuis le cercle de départ à travers une courte séquence de cibles puis revenir, aussi vite que possible mais sans exiger une précision extrême : il suffisait que la pointe touche n’importe quelle zone à l’intérieur de chaque cercle. Ce dispositif de faible précision encourageait des mouvements rapides et fluides, laissant les trajectoires se courber et se fondre entre les cibles plutôt que de s’arrêter brusquement sur chacune d’elles.
Lire les plans cachés dans les courbes de la main
Plutôt que de chronométrer la durée des mouvements ou de compter les erreurs, l’équipe s’est concentrée sur la forme exacte de chaque trajectoire de la pointe du doigt. Ils ont examiné deux caractéristiques clés. Premièrement, la « déviation intermédiaire » : dans quelle mesure la trajectoire vers une cible dérivait vers la cible suivante avant d’y arriver. Deuxièmement, le « contournement d’une cible » : à quel point la trajectoire courbait de façon nette ou douce en passant près d’une cible et en changeant de direction. Ensemble, ces motifs révèlent si un mouvement vers une cible prend déjà en compte la cible suivante — un effet appelé « coarticulation », proche de la façon dont la bouche prépare les sons à venir pendant la parole. Les scientifiques ont comparé ces courbes mesurées aux trajectoires générées par deux modèles informatiques de planification du mouvement, tous deux fondés sur des théories établies de contrôle optimal mais différant par leur structure interne.
Plans plats versus plans en couches
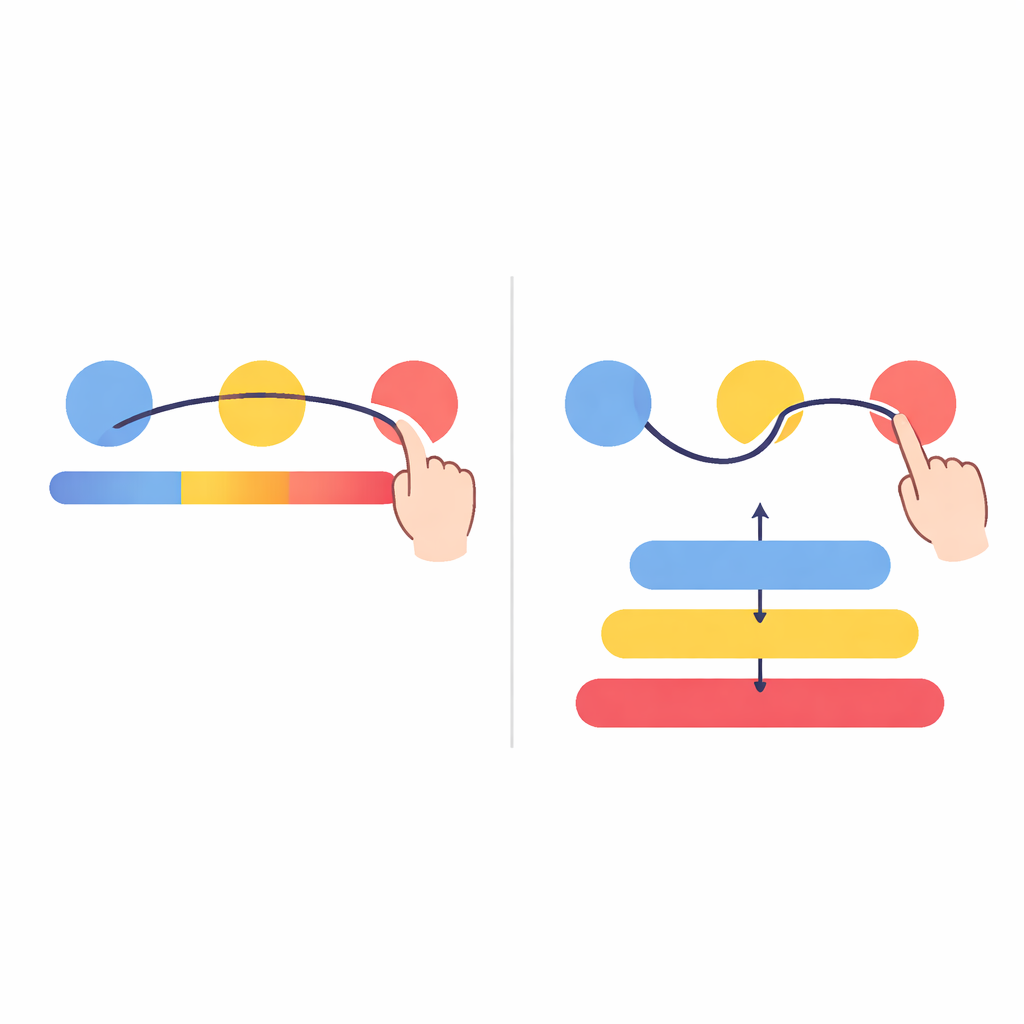
Dans le modèle « plat », on imagine que le cerveau planifie la séquence complète de trois cibles comme une trajectoire unique et unifiée avant que la main ne commence à bouger. Cela ressemble à un geste entièrement mémorisé ou à un « chunk » exécuté d’un seul coup. Dans ce cas, la déviation intermédiaire et le contournement des cibles sont étroitement liés : une fois que le planificateur décide de l’intensité de visée pour la première cible, il fixe en grande partie l’apparence des courbes pour toute la séquence. Le modèle « hiérarchique », en revanche, ajoute une simple couche intermédiaire qui assemble des pièces plus petites — comme un mouvement deux-cibles suivi d’un retour vers une cible unique — en temps réel. Un système dynamique séparé décide quand passer d’un sous-mouvement au suivant, ce qui permet d’ajuster plus indépendamment la forme autour de chaque cible tout en conservant la fluidité globale du mouvement.
Un comportement qui semble hiérarchique
Lorsque les chercheurs ont exécuté de nombreuses simulations, ils ont constaté que le modèle plat ne pouvait tout simplement pas produire certaines combinaisons de déviation intermédiaire et de contournement que les participants humains généraient naturellement. En particulier, les personnes montraient souvent une forte déviation vers la deuxième cible dans la première partie du mouvement, tout en effectuant un contournement net ou de forme différente autour de cette deuxième cible — des motifs que le planificateur plat ne pouvait pas reproduire. Le modèle hiérarchique, en revanche, pouvait recréer ces comportements mixtes en reliant dynamiquement des « sous-mouvements » séparés aux cibles intermédiaires. En comparant les données réelles aux deux modèles, les auteurs ont conclu qu’environ la moitié des séquences enregistrées nécessitaient clairement une explication hiérarchique, tandis que d’autres étaient compatibles avec une planification plate, ce qui suggère que les personnes alternent de manière flexible entre stratégies selon la séquence.
Ce que cela signifie pour les compétences quotidiennes
Les résultats suggèrent que, même sans pratique prolongée ni routines hautement entraînées, nos cerveaux s’appuient souvent sur des plans en couches lorsqu’ils enchaînent des atteintes simples. Plutôt que de toujours comprimer une séquence en un seul « chunk » rigide, le système moteur semble conserver des morceaux de mouvement réutilisables et les assembler en temps réel. Avec l’entraînement, ces chaînes peuvent progressivement se condenser en actions plus plates et entièrement « chunkées », contribuant à expliquer comment les compétences deviennent si rapides et automatiques. Ce travail offre une nouvelle fenêtre géométrique sur la façon dont le cerveau organise le mouvement, et pourrait orienter de futures recherches sur l’apprentissage moteur, la rééducation et la conception de robots se déplaçant avec une grâce adaptative similaire.
Citation: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Mots-clés: contrôle moteur, planification du mouvement, regroupement, comportement hiérarchique, atteintes séquentielles