Clear Sky Science · fr
Accrochage par fracture : l’impact dynamique permet un ancrage robotique prévisible sur la glace douce
Grimper là où la gravité est quasi inexistante
Imaginez devoir gravir une falaise gelée où la gravité est si faible que votre propre poids n’aide pas vos chaussures à s’enfoncer. C’est le défi que devront relever les robots envoyés vers des lunes glacées comme Encelade de Saturne, où les scientifiques espèrent chercher des signes de vie dans des évents et des cavernes de glace profonde. Cet article décrit une nouvelle manière pour les robots de s’accrocher à la glace en utilisant des coups rapides, semblables à des marteaux, puis une forte pince, s’inspirant des piolets des alpinistes. Le résultat est un système d’ancrage léger qui utilise bien moins de force et d’énergie que les vis à glace ou les pioches chauffantes actuelles, rendant potentiellement des mondes glacés jusque-là inaccessibles plus abordables.

Pourquoi il est si difficile de tenir la glace
Sur Terre, un grimpeur peut mettre tout son poids dans une vis à glace ou un piolet pour que l’outil morde la surface. Sur Encelade, la gravité n’est qu’environ un pour cent de celle de la Terre, donc un robot ne peut pas compter sur son poids pour enfoncer des outils dans la glace. Les solutions existantes présentent chacune de lourds inconvénients. Les vis à glace exigent de fortes poussées pour commencer à mordre la surface — à tel point que, sur Encelade, un robot devrait peser autant qu’un gros rover martien pour les utiliser efficacement. Les « pioches thermiques » chauffées peuvent fondre la glace pour s’y insérer avec très peu de poussée, mais elles consomment des quantités d’énergie énormes à chaque utilisation, une contrainte sérieuse pour des engins opérant loin du Soleil. Parallèlement, de nombreux robots d’escalade modernes reposent sur des aspérités rocheuses, la succion ou des adhésifs spéciaux, qui ont tous du mal avec les formes lisses mais ondulées de la glace de glacier naturelle.
Emprunter un truc aux grimpeurs humains
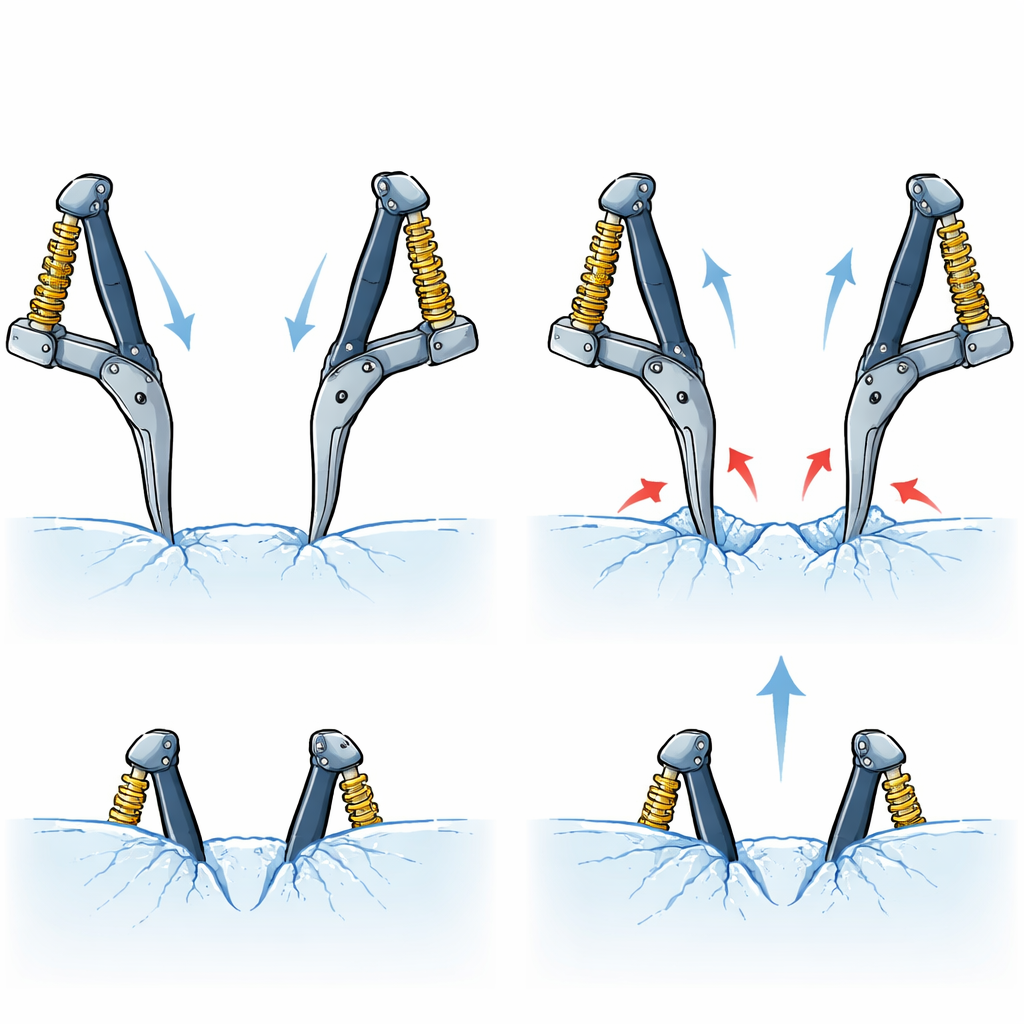
Les auteurs proposent une stratégie différente : au lieu d’essayer de s’adapter à la surface de glace, créer ses propres points d’accroche. Leur dispositif utilise deux petits piolets montés sur un préhenseur compact. D’abord, des ressorts à l’intérieur des bras sont armés, stockant une quantité modeste d’énergie mécanique. Lorsqu’ils sont libérés, les piolets basculent comme de petits marteaux et frappent la glace, écaillant de petites cavités. Ensuite, le même mécanisme serre les piolets l’un vers l’autre pour que leurs pointes s’accrochent dans ces nouvelles empreintes. Ce processus en deux étapes — impact puis préhension — transforme une zone lisse de glace en quelque chose que le robot peut tenir, et il est facilement réversible pour permettre au robot de faire un autre « pas ». Tout le cycle est alimenté par un seul moteur qui arme les ressorts et actionne le serrage.
Tester la physique derrière la prise
Pour s’assurer que l’approche fonctionnerait de façon fiable, l’équipe a construit des modèles mathématiques de la profondeur d’enfoncement des pointes de piolet et de l’énergie de rebond après l’impact. Ils ont ensuite testé des piolets uniques balançant comme des pendules dans des blocs de glace douce refroidis à des températures typiques de glacier. En comparant théorie et expérience, ils ont constaté que leurs modèles pouvaient prédire la profondeur d’une cavité et estimer l’énergie de « recul » lorsque le piolet rebondit. À partir de ces résultats, ils ont calculé la force que le robot doit exercer en poussée sur le préhenseur avant la frappe, pour que les piolets restent dans leurs cavités nouvellement créées au lieu d’en ressortir. Pour l’énergie de ressort choisie, le modèle prédit qu’environ 16 newtons de poussée — à peu près le poids de quelques litres d’eau sur Terre — assureraient pratiquement un succès certain.
Du banc de laboratoire à la paroi du glacier
Avec les modèles en main, les chercheurs ont testé le préhenseur double-piolet complet. En laboratoire, ils ont confirmé que des impacts avec une énergie stockée dans les ressorts de 8 joules pouvaient créer des cavités suffisamment profondes tout en nécessitant beaucoup moins de poussée initiale que les vis à glace et bien moins d’énergie que les ancrages thermiques. Ils ont ensuite mesuré la solidité de la prise en tirant le dispositif directement hors de la glace. En réglant la force de serrage des piolets, ils ont identifié deux modes de défaillance : avec un serrage faible, les pointes glissent hors des cavités ; avec un serrage très fort, ce sont les rebords de glace qui se détachent. Entre ces extrêmes existe une zone optimale où le préhenseur peut supporter plus de deux fois son propre poids. Des essais sur le terrain, sur un glacier français, ont montré que l’appareil pouvait s’ancrer sur de la glace naturelle raide, de la neige compacte et même des troncs d’arbres, des rochers et des sols tassés, confirmant que la méthode d’impact puis de prise fonctionne en dehors du laboratoire.
Ce que cela signifie pour les explorateurs futurs
L’étude montre que fracturer puis pincer la glace peut être un moyen très efficace pour les robots de grimper et de se stabiliser dans des environnements rudes à faible gravité. En exploitant le fait que fissurer la glace demande beaucoup moins d’énergie que la faire fondre, le préhenseur double-piolet forme des ancrages solides et réversibles en utilisant des forces modestes et seulement quelques joules d’énergie par pas. Pour des missions vers Encelade ou d’autres mondes glacés, un tel système pourrait permettre à de petits robots à énergie limitée de descendre en toute sécurité dans des évents ou de s’accrocher à des parois pour prélever des échantillons susceptibles de révéler si la vie existe au‑delà de la Terre. La même idée pourrait aussi aider des robots terrestres à explorer des glaciers, des grottes glacées et des parois rocheuses fragiles trop dangereuses ou inaccessibles pour des grimpeurs humains.
Citation: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Mots-clés: escalade robotique sur glace, exploration planétaire, préhenseurs robotiques, ancrage par fracture de la glace, missions vers Encelade