Clear Sky Science · fr
Planification concrète de trajectoires multi-agents permettant des manœuvres kinodynamiquement agressives
Des robots qui dansent dans le trafic
Imaginez des dizaines de robots volants et roulants zippant dans un entrepôt, sans jamais se percuter, et accomplissant leurs tâches plus rapidement que des conducteurs humains. Cet article décrit une nouvelle manière de chorégraphier un tel « trafic » robotique afin que de nombreuses machines puissent se déplacer de façon agressive et rapide dans des espaces contraints tout en restant sûres. Ce travail importe parce que les mêmes idées pourraient un jour piloter des flottes de robots dans des usines, des entrepôts et des services de livraison amenés à fonctionner en continu dans notre monde quotidien.
Pourquoi rassembler beaucoup de robots est si difficile
Coordonner une foule de robots est bien plus compliqué que piloter un seul d’entre eux. Chaque robot doit atteindre son point d’arrivée sans heurter les autres, sans les bloquer, ni rester coincé dans des boucles infinies. Les approches actuelles tendent à osciller entre deux extrêmes. Certaines méthodes traitent les robots comme des pièces de jeu sur une grille, ce qui rend la planification pour des centaines d’entre eux rapide et mathématiquement propre — mais les trajectoires obtenues négligent souvent la façon dont de vraies machines se déplacent, accélèrent ou tournent. D’autres méthodes simulent la dynamique complète et produisent de belles trajectoires lisses, mais deviennent terriblement lentes ou peu fiables lorsque le nombre de robots dépasse quelques unités.
Une voie médiane : la planification « concrète »
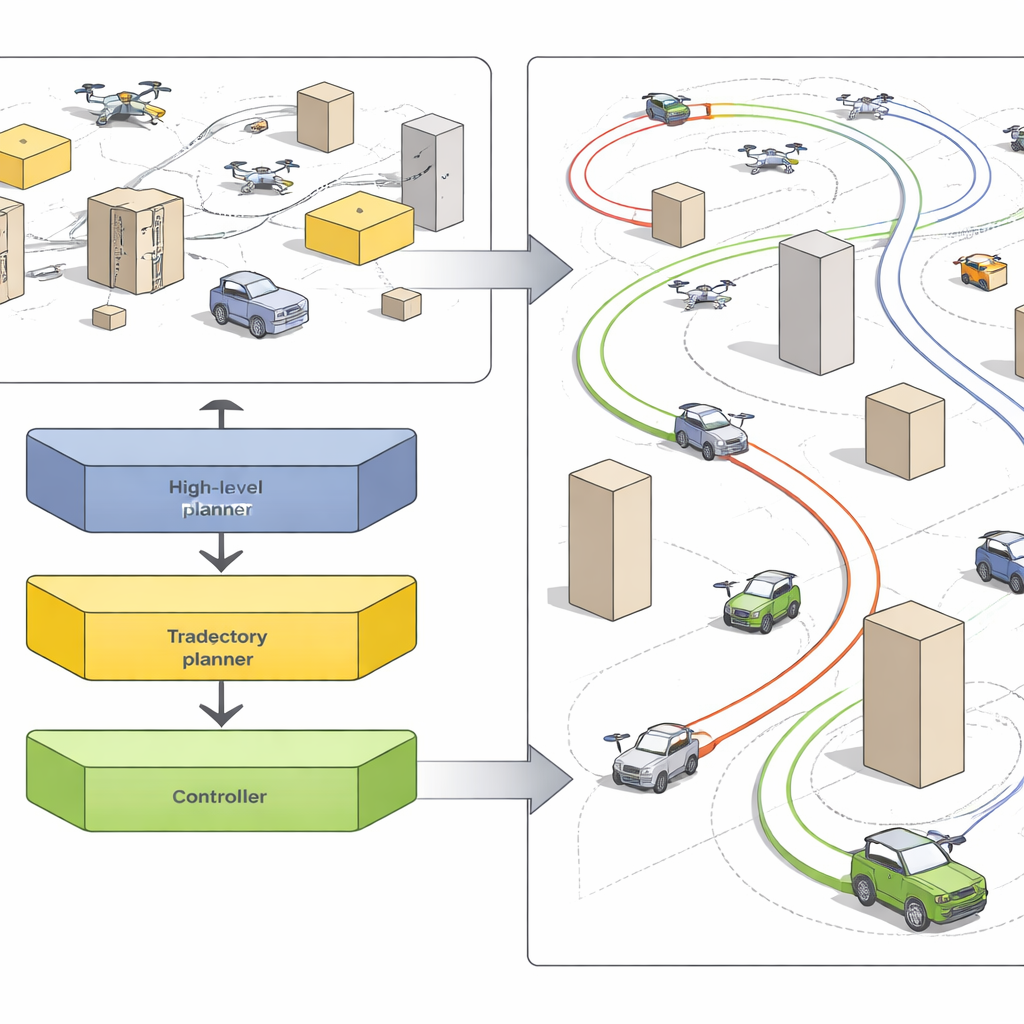
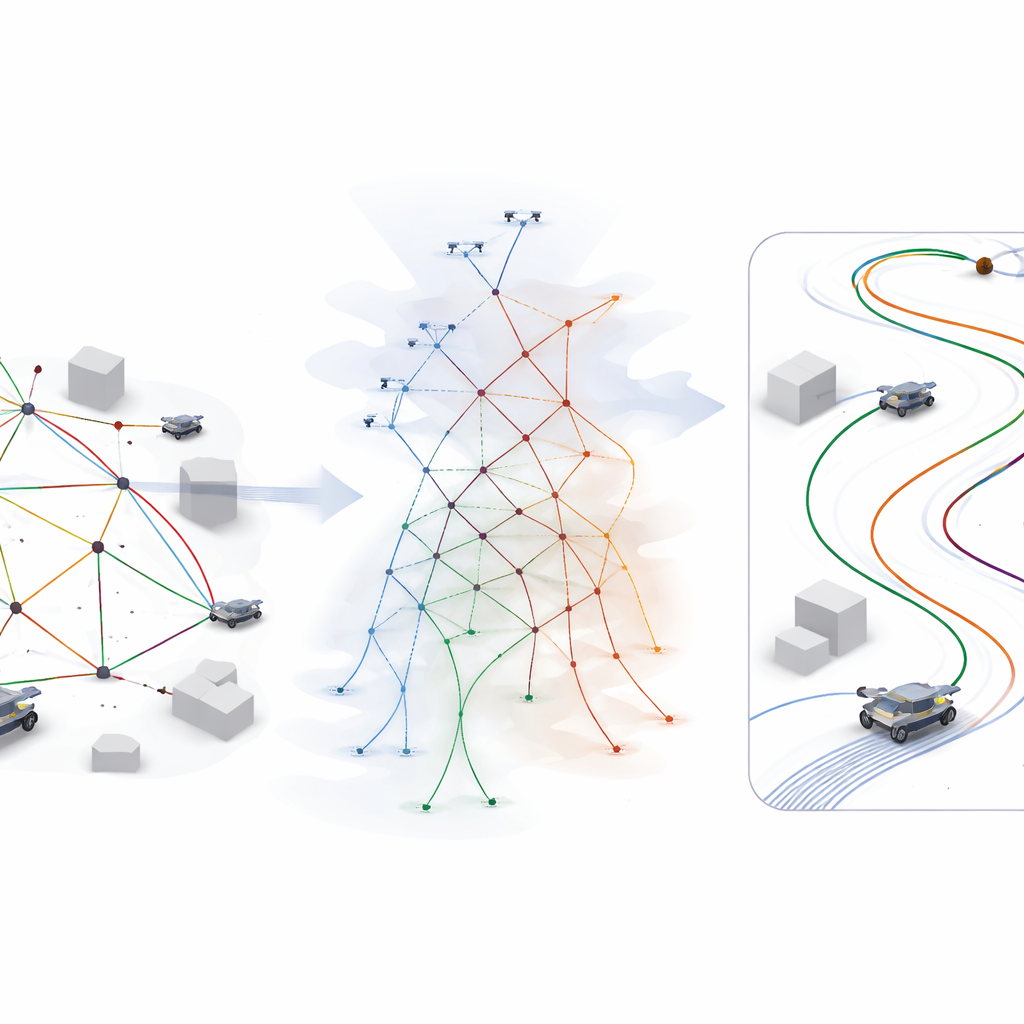
Les auteurs proposent une stratégie hybride qu’ils appellent planification multi‑agents « concrète ». L’idée est de mélanger la structure nette de la planification sur grille avec une image réaliste de la mobilité des robots. Plutôt que de travailler uniquement dans une grille abstraite ou dans une physique pleinement continue, le système utilise une description en couches du mouvement. Un planificateur central recherche sur un ensemble discret de mouvements possibles pour l’ensemble des robots à la fois, mais chaque mouvement est enrichi par des prédictions sur sa durée, sur la façon dont le robot peut dévier de sa trajectoire prévue et sur la distance minimale sûre de passage vis‑à‑vis des autres. Ces prédictions proviennent de modèles fondés sur des données entraînés sur des expériences réelles, de sorte que le planificateur « sait » comment sa flotte se comporte en pratique.
Du croquis grossier au mouvement précis
Une fois que le planificateur couplé a produit des séquences d’étapes sûres et sans conflit pour chaque robot, le cadre se rapproche. Un second module transforme chaque trajectoire grossière en une trajectoire dense et lisse qui respecte les limites de poussée, de braquage et d’autres contraintes physiques. Pour faire cela rapidement, les auteurs ont d’abord utilisé une lourde optimisation numérique hors ligne pour générer de nombreux exemples de mouvements proches de l’optimal en temps, puis ont entraîné des réseaux de type transformer à imiter ces exemples. À l’exécution, ces réseaux peuvent générer des trajectoires de référence de haute qualité en moins d’une milliseconde. Une troisième couche, un contrôleur prédictif reposant sur un modèle et équipé d’un filtre de sécurité, ajuste en permanence les commandes pour suivre ces références et utilise la perception locale pour éviter les surprises, comme un obstacle errant ou une légère erreur de suivi.
Quarante robots mis à l’épreuve
L’équipe a démontré son système avec une flotte mixte de 20 drones quadrirotors, 8 robots terrestres et 12 robots jouant le rôle d’obstacles mobiles, tous opérant ensemble dans une arène intérieure de taille pièce. Dans une série d’expériences, des essaims de drones ont sprinté à travers des espaces confinés à des vitesses de pointe supérieures à cinq mètres par seconde tout en s’évitant mutuellement dans une sorte de ballet tridimensionnel. Dans une autre, des robots terrestres ont traversé à plusieurs reprises une zone encombrée par des obstacles en mouvement aléatoire, accomplissant plus de missions, avec moins d’arrêts et sans collisions, que les méthodes concurrentes. Les essais les plus exigeants impliquaient les 40 robots exécutant plusieurs missions en séquence, le système replanifiant continuellement à la demande sans blocages ni collisions.
Indices pour de futurs systèmes de livraison et d’entrepôt
Pour montrer comment cela pourrait se traduire en tâches réelles, les auteurs ont mis en scène des livraisons simulées du « dernier kilomètre » et des opérations d’entrepôt. Dans le scénario de livraison, des robots terrestres transportaient des drones jusqu’à une « berge », où les drones décollaient, se rendaient à des points de dépôt dispersés, revenaient à leurs bases mobiles, puis repartaient vers la zone de départ — tout en évitant des obstacles mobiles. Dans la maquette d’entrepôt, des équipes de drones ont transporté de façon répétée des colis virtuels entre des étagères et des zones d’expédition, maintenant un trafic dense, agile et un débit élevé. Ces études de cas ont nécessité seulement un réglage mineur du cadre, soulignant sa capacité d’adaptation à de nouvelles plateformes et missions.
Ce que cela signifie pour la suite
Concrètement, ce travail montre qu’il est possible de faire évoluer de grandes équipes de robots de façon audacieuse et sûre dans des espaces restreints et changeants en combinant soigneusement une planification rapide de haut niveau, des modèles de mouvement réalistes et des vérifications de sécurité en dernier recours. L’approche « concrète » transforme des plans abstraits en mouvements que de vraies machines peuvent exécuter à grande vitesse, tout en offrant des garanties contre les collisions et les blocages dans de nombreux contextes pratiques. Bien que des environnements extrêmement chaotiques et des espaces entièrement inconnus restent des défis, le cadre ouvre la voie à un futur où des flottes de drones de livraison, d’agents d’entrepôt et d’autres travailleurs robotiques partageront des environnements encombrés sans supervision humaine constante.
Citation: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Mots-clés: coordination multi-robots, planification de trajectoire, essaims de robots, automatisation d'entrepôt, livraison par drone