Clear Sky Science · fr
Stratégie adaptative inspirée des insectes pour compenser une déficience olfactive dans la localisation de sources d’odeur par des robots
Pourquoi perdre un capteur ne signifie pas perdre la piste
Imaginez un robot de recherche et sauvetage qui tente de détecter une fuite de gaz ou un survivant enseveli dans un bâtiment effondré — puis l’un de ses capteurs clés tombe en panne. Les robots d’aujourd’hui échouent souvent dans ce genre de situation. Cette étude s’inspire d’un surprenant expert en navigation olfactive, le papillon de soie mâle, pour montrer comment les animaux peuvent continuer à localiser une source d’odeur même après avoir perdu la moitié de leur « nez », et comment cette stratégie peut être recopiée sur des robots quadrupèdes.
Un petit navigateur doté d’un odorat puissant
Beaucoup d’animaux — des insectes aux chiens — utilisent des signaux chimiques aéroportés pour trouver de la nourriture, des partenaires ou un abri sûr. Les odeurs sont particulièrement utiles quand la vision est obstruée par l’obscurité, la fumée ou les décombres. Mais les panaches d’odeur réels sont désordonnés : le vent change, les bâtiments et les arbres dévient le flux, et l’odeur la plus intense n’est pas toujours directement en amont de la source. La plupart des robots chasseurs d’odeurs supposent que tous leurs capteurs olfactifs fonctionnent parfaitement et que les directions du vent et de l’odeur s’alignent proprement. Dans la nature, aucune de ces hypothèses n’est vraie. Le bombyx du mûrier (Bombyx mori) offre un contre-exemple naturel : les mâles peuvent localiser des femelles émettant des phéromones sexuelles même dans un air turbulent et, de façon intrigante, même lorsqu’une de leurs deux antennes — leurs principaux organes olfactifs — est retirée.
Comment le papillon s’adapte après la perte d’une antenne
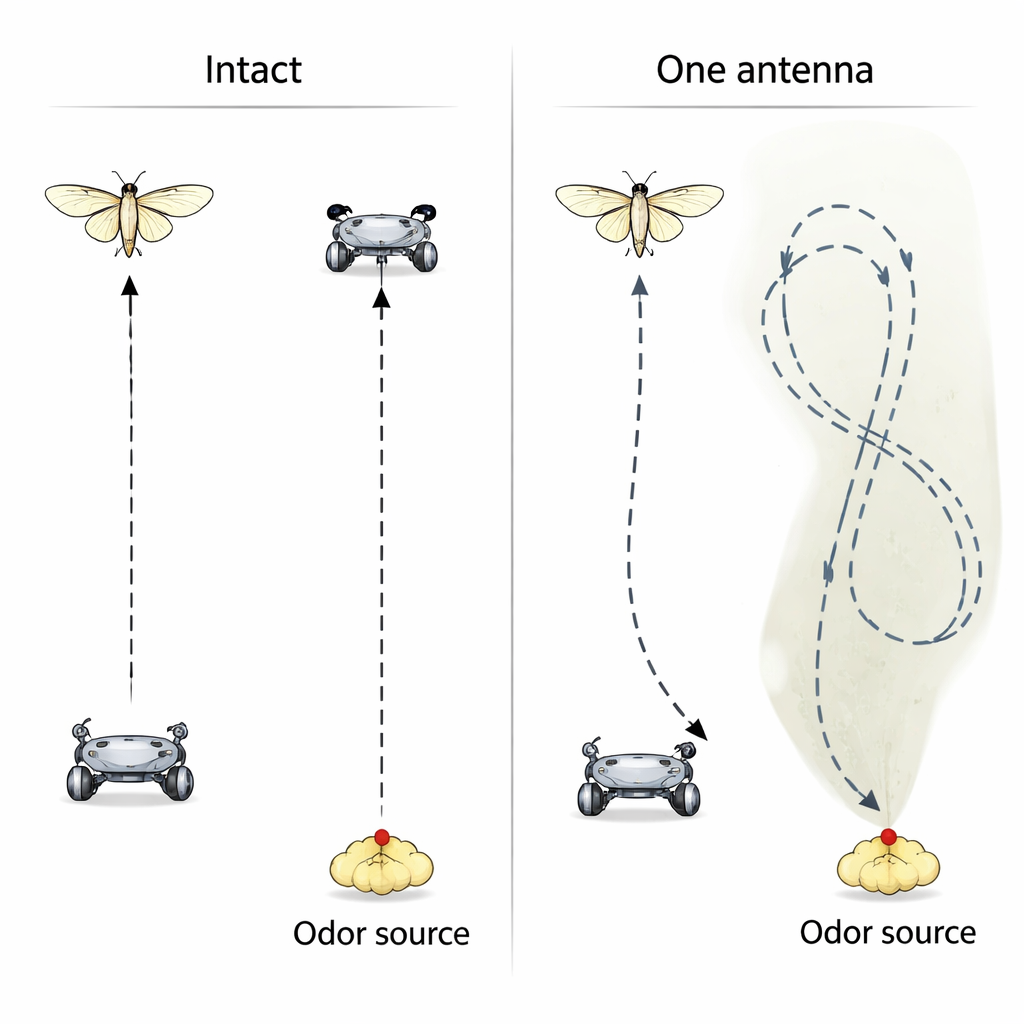
Les chercheurs ont d’abord testé la capacité des mâles de papillon de soie intacts et de ceux auxquels on avait enlevé l’antennule gauche à marcher vers une source d’odeur en laboratoire. Les deux groupes commençaient à 15 centimètres d’un point émettant des phéromones. De manière surprenante, le taux de réussite — atteindre la source en moins d’une minute — ne chutait pas de façon significative après l’ablation d’une antenne. Ce qui changeait, c’était la trajectoire : les papillons intacts avaient tendance à marcher selon une route assez droite, tandis que les papillons à une antenne prenaient des chemins plus longs et sinueux qui courbaient du côté de l’antennule restante. Des mesures détaillées des mouvements de la tête ont révélé que les papillons modifiaient leur stratégie de virage selon l’endroit de l’antennule restante où l’odeur était détectée — près de la base ou près de l’extrémité — et selon le sens du virage en cours.
Deux règles simples cachées dans un comportement complexe
En pulsant à plusieurs reprises l’odeur à gauche et à droite et en suivant les angles de tête des papillons, l’équipe a converti le comportement en courbes de probabilité montrant la propension d’un papillon à tourner à gauche ou à droite après chaque bouffée. Lorsqu’une odeur frappait près de la base de l’antennule, le papillon favorisait fortement la poursuite de la rotation du même côté, s’engageant en pratique à suivre le virage en cours. Quand l’odeur atteignait l’extrémité, le choix devenait plus équilibré, avec une légère tendance à explorer le côté opposé. En bref, la perte d’une antenne ne faisait pas abandonner le papillon ; elle le poussait à adopter un motif de recherche qui échantillonne plus largement les deux côtés de l’espace, en particulier le long du « bord » du panache d’odeur où l’intensité olfactive varie rapidement.
Apprendre à un robot quadrupède à sentir comme un papillon
Ensuite, les chercheurs ont construit un robot quadrupède équipé de capteurs d’odeur sur sa « tête », disposés pour imiter la structure base-vers-pointe d’une antenne. Ils ont créé deux algorithmes de recherche. Le premier, une approche standard inspirée du papillon appelée SZL (pour surge–zigzag–loop), suppose deux capteurs olfactifs opérationnels et choisit sa direction de « surge » (avancée) droite à partir du timing relatif des détections gauche et droite. Le second, appelé moth-inspired context-dependent (CDMI), intègre les nouvelles règles observées chez le papillon : il estime où le long du capteur restant l’odeur a été détectée et utilise les courbes de probabilité dérivées des expériences animales pour décider où se diriger et à quel angle tourner. En essais en intérieur, SZL fonctionnait mieux lorsque les deux capteurs étaient intacts, produisant des trajectoires rapides et relativement droites. Mais lorsqu’un capteur était désactivé, CDMI surpassait clairement SZL, trouvant la source plus souvent en suivant le bord changeant du champ d’odeur dans des trajectoires en boucles similaires à celles des papillons à une antenne.
Des robots qui restent efficaces quand quelque chose se casse
Pour pousser l’idée plus loin, l’équipe a testé ses robots en extérieur, où le vent naturel et la turbulence rendent les panaches d’odeur très hétérogènes. Ils ont donné au robot intact l’algorithme conventionnel SZL et au robot « à un capteur » l’algorithme CDMI. Les deux ont atteint des taux de réussite comparables, mais le robot endommagé utilisant la stratégie adaptative inspirée du papillon trouvait souvent la source avec des trajectoires plus courtes et moins sinueuses. Cela suggère que, dans des conditions réelles et difficiles, il peut être préférable de passer d’un schéma de détection précis mais fragile à une stratégie plus exploratoire, suivant les bords. Le message plus large est que la navigation robuste ne nécessite pas une intelligence artificielle de plus en plus complexe. Au contraire, des règles simples ancrées dans la biologie — liées à la disposition des capteurs sur le corps et à l’interaction du corps avec l’environnement — peuvent aider à créer des robots qui continuent de fonctionner même lorsque des pièces clés défaillent, une propriété cruciale pour les missions d’exploration et de sauvetage de longue durée.
Citation: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Mots-clés: navigation olfactive, robotique bioinspirée, localisation de source d’odeur, IA inspirée des insectes, intelligence incarnée