Clear Sky Science · fr
Préhension réactive au toucher avec une paume active pour une manipulation habile
Des robots qui sentent ce qu’ils tiennent
Imaginez un robot capable de cueillir délicatement une fraise mûre, de dévisser un bouchon sécurisé pour enfants ou de visser une ampoule au‑dessus de sa tête — le tout sans écraser, lâcher ou désaligner quoi que ce soit. Cet article décrit une nouvelle pince robotique qui rapproche les machines de cette dextérité humaine en dotant le robot non seulement de doigts intelligents, mais aussi d’une paume active et très sensible.
Une paume qui fait plus que tenir
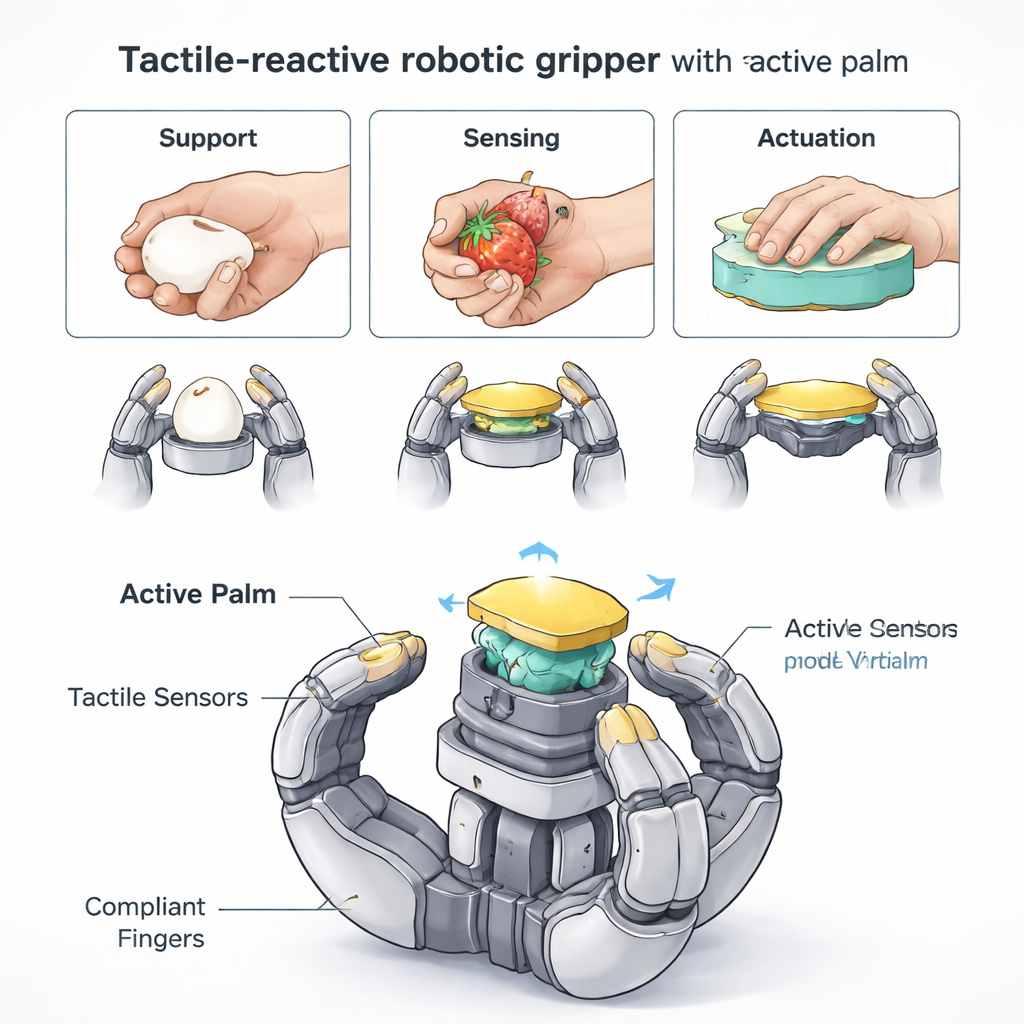
La plupart des mains robotiques actuelles ont soit des griffes simples et rigides qui savent seulement saisir, soit des mains à plusieurs doigts très complexes, difficiles à construire et à contrôler. Une idée clé de ce travail est que la main humaine s’appuie beaucoup sur la paume — pas seulement sur les doigts — pour soutenir, sentir et pousser. Les chercheurs ont conçu une pince à trois doigts avec une paume centrale pouvant monter et descendre et recouverte d’un capteur tactile à base de caméra. Chaque pulpe de doigt possède aussi sa propre surface flexible mesurant la pression. Ensemble, ces éléments permettent à la pince de détecter où et comment elle touche un objet et d’ajuster sa préhension en temps réel, même si l’ensemble ne comporte que sept articulations mobiles.
Mouvements simples, nombreuses façons de saisir
Les trois doigts identiques de la pince peuvent balayer et se plier, permettant plusieurs styles de prise quotidiens : enfermer de gros objets comme des balles, pincer des éléments fins comme des cartes, ou serrer des outils lourds en prise de force. La structure souple, en forme d’épine, enveloppe naturellement des objets de différentes formes sans programmation complexe. Pendant ce temps, la paume coulisse verticalement comme un ascenseur : elle peut appuyer contre un objet, partager la charge avec les doigts ou repositionner l’objet dans la main. Des simulations et des expériences montrent que, même avec seulement deux articulations par doigt plus la paume mobile, la main peut déplacer des objets dans de nombreuses directions et éviter des positions maladroites et difficiles à contrôler.
Sentir avec les doigts et la paume
Pour comprendre ce qu’elle tient, la pince combine trois types de capteurs : des images tactiles détaillées provenant de la paume, des cartes de pression depuis les doigts et les mesures des angles de ses propres articulations. Un système d’apprentissage automatique fusionne ces signaux, en accordant plus d’importance aux indices les plus utiles pour chaque objet. Lors d’essais avec des canettes et des balles de tailles et de matériaux variés, le système a pu reconnaître l’objet tenu avec près de 99 % de précision. Ce sens du toucher riche guide aussi la force de serrage, le moment d’arrêter de fermer les doigts et la façon de déplacer la paume pour maintenir un contact stable sans générer trop de friction.
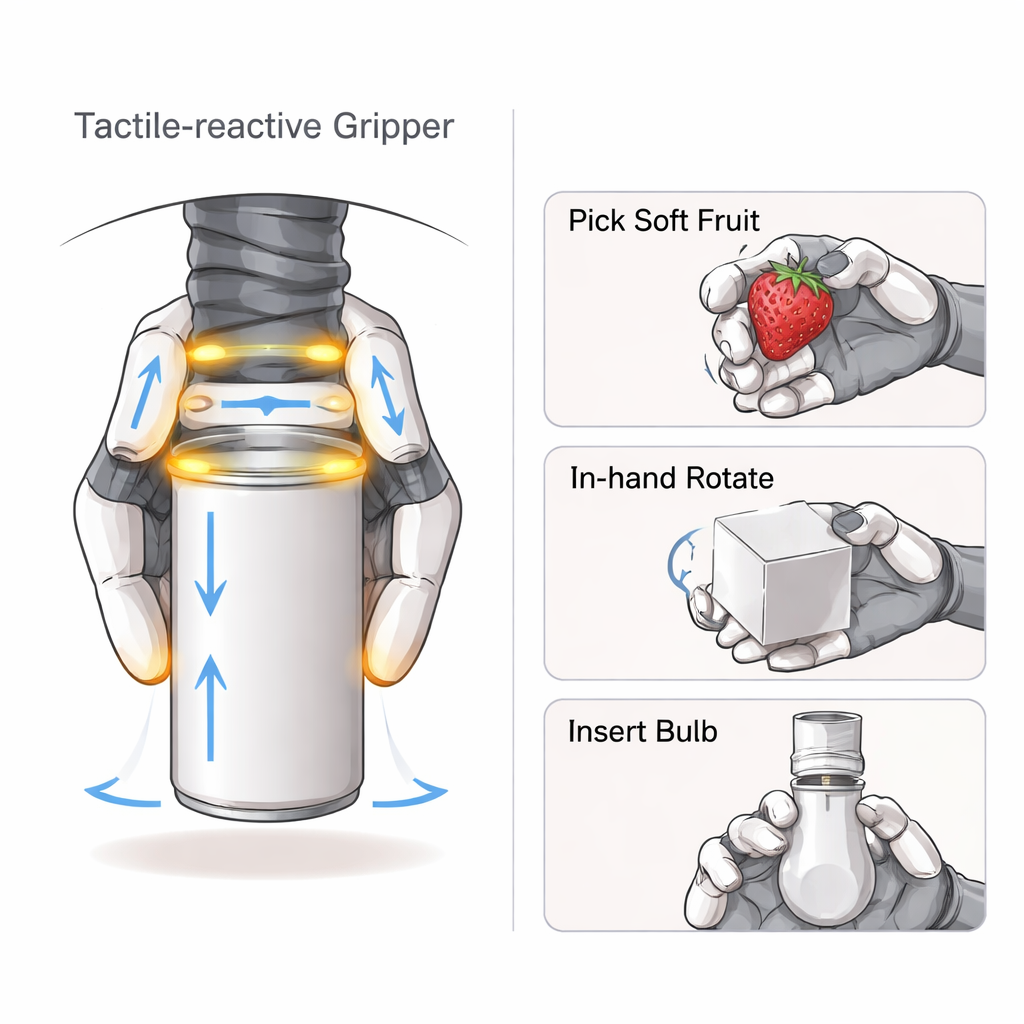
Des objets de test aux fruits et ampoules
L’équipe a soumis la pince à une référence répandue d’objets de saisie robotique comprenant des articles du quotidien comme des balles, des outils et de petites pièces de quincaillerie. Elle a obtenu un score supérieur à plusieurs pinces de recherche connues tout en utilisant moins de pièces mobiles. Au‑delà des jeux de test, la pince a montré qu’elle pouvait cueillir des fruits fragiles — fraises, raisins, tomates et autres — sans meurtrissures visibles même plusieurs jours après, vérifié sous lumière ultraviolette. Elle a également pu translater et faire tourner des blocs et des cylindres avec précision dans sa main, visser une ampoule dans une douille orientée vers le haut, pousser le piston d’une seringue tout en tenant le corps et ouvrir des bouchons résistants aux enfants en appuyant et en tournant. Dans nombre de ces tâches, la paume mobile a fourni la poussée, le support ou la perception supplémentaires qui font défaut aux pinces ne comportant que des doigts.
Pourquoi cela compte pour les robots du futur
Ce travail montre que les robots n’ont pas toujours besoin de plus en plus de doigts ou d’articulations pour être habiles. En coordonnant soigneusement quelques doigts souples avec une paume active et sensible au toucher, cette pince atteint un mélange de force, de délicatesse et de perception qui commence à ressembler à une main humaine. Parce que les pièces sont majoritairement imprimées en 3D et utilisent des capteurs commerciaux, le design est relativement facile à reproduire. Avec un contrôle basé sur l’apprentissage supplémentaire, des pinces similaires pourraient aider les robots à manipuler des courses, assister aux soins à domicile ou travailler en sécurité avec des humains dans les usines — en ressentant avec assurance ce qu’ils font, plutôt qu’en se contentant de deviner.
Citation: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Mots-clés: pince robotique, détection tactile, manipulation habile, main robotique, paume active