Clear Sky Science · fr
Exploiter la proprioception dans des ailes souples aquatiques pour une rejet hybride passif-actif des perturbations
Ailes intelligentes sous l'eau
Quiconque a regardé un oiseau stationner dans un vent rafaleux ou un poisson rester immobile dans un courant rapide a vu la nature résoudre un problème d’ingénierie difficile : comment rester sur la bonne trajectoire quand le fluide environnant refuse d’être coopératif. Cette étude montre comment un nouveau type d’aile souple sous-marine, doté d’un « sens de soi » similaire à la proprioception animale, peut détecter automatiquement les changements brutaux d’écoulement et se reconfigurer pour rester stable. Ce travail ouvre la voie à des robots sous-marins qui planent davantage comme des animaux et moins comme des machines rigides, économisant de l’énergie tout en affrontant des mers agitées.
S’inspirer des oiseaux et des poissons
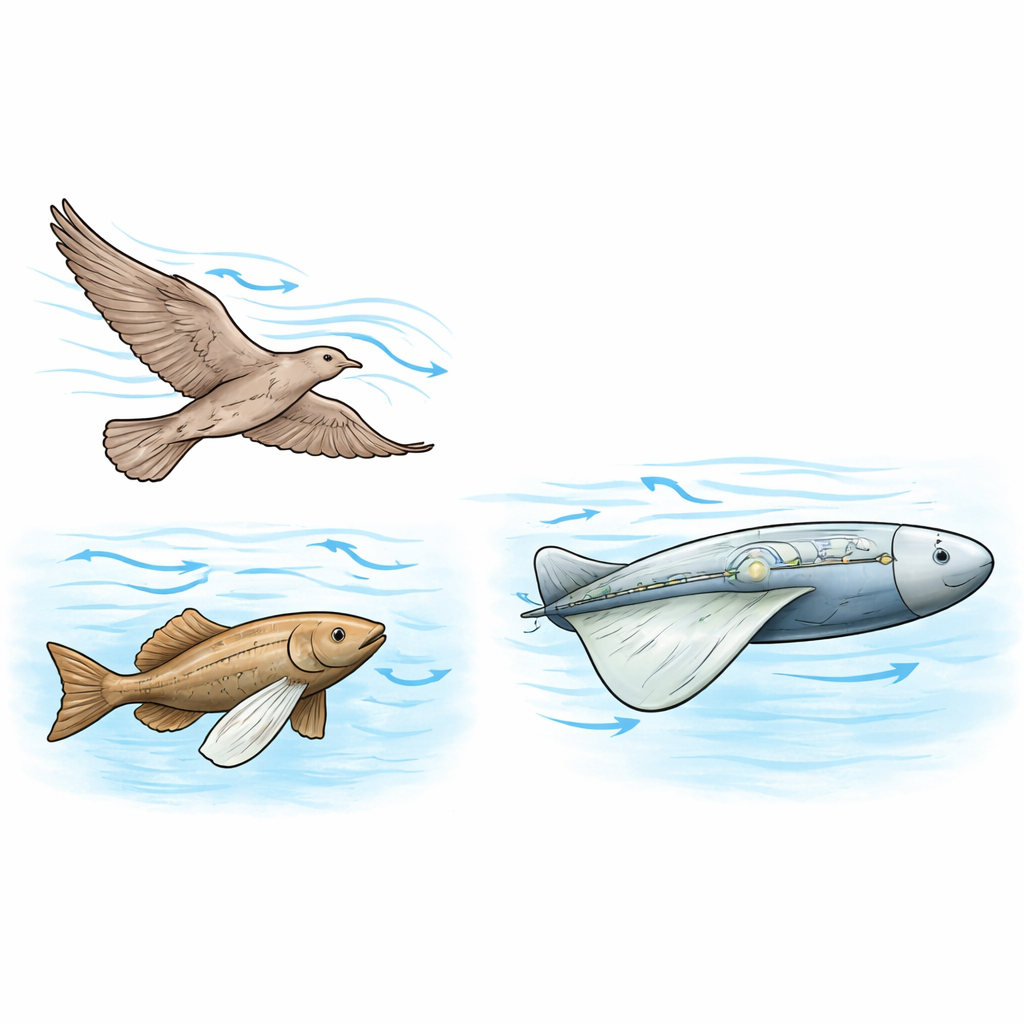
Dans la nature, les ailes et les nageoires ne sont pas des pales rigides ; elles se plient, se tordent et se déforment. Les oiseaux perçoivent le mouvement de l’air grâce à de minuscules récepteurs dans leurs plumes, tandis que les poissons utilisent des cellules sensibles à la pression le long de leur corps et dans les rayons de leurs nageoires. Ces capteurs intégrés permettent aux animaux de sentir comment leurs appendices se déforment dans un flux d’eau ou d’air et de réagir presque instantanément, rejetant rafales et turbulences. En revanche, la plupart des véhicules sous-marins utilisent des surfaces de contrôle rigides et des instruments séparés pour mesurer l’écoulement, ce qui les rend lents et gourmands en énergie lorsque l’environnement devient chaotique. Les auteurs soutiennent que combiner flexibilité et détection dans une même structure souple pourrait réduire cet écart.
Une aile souple avec des sens intégrés
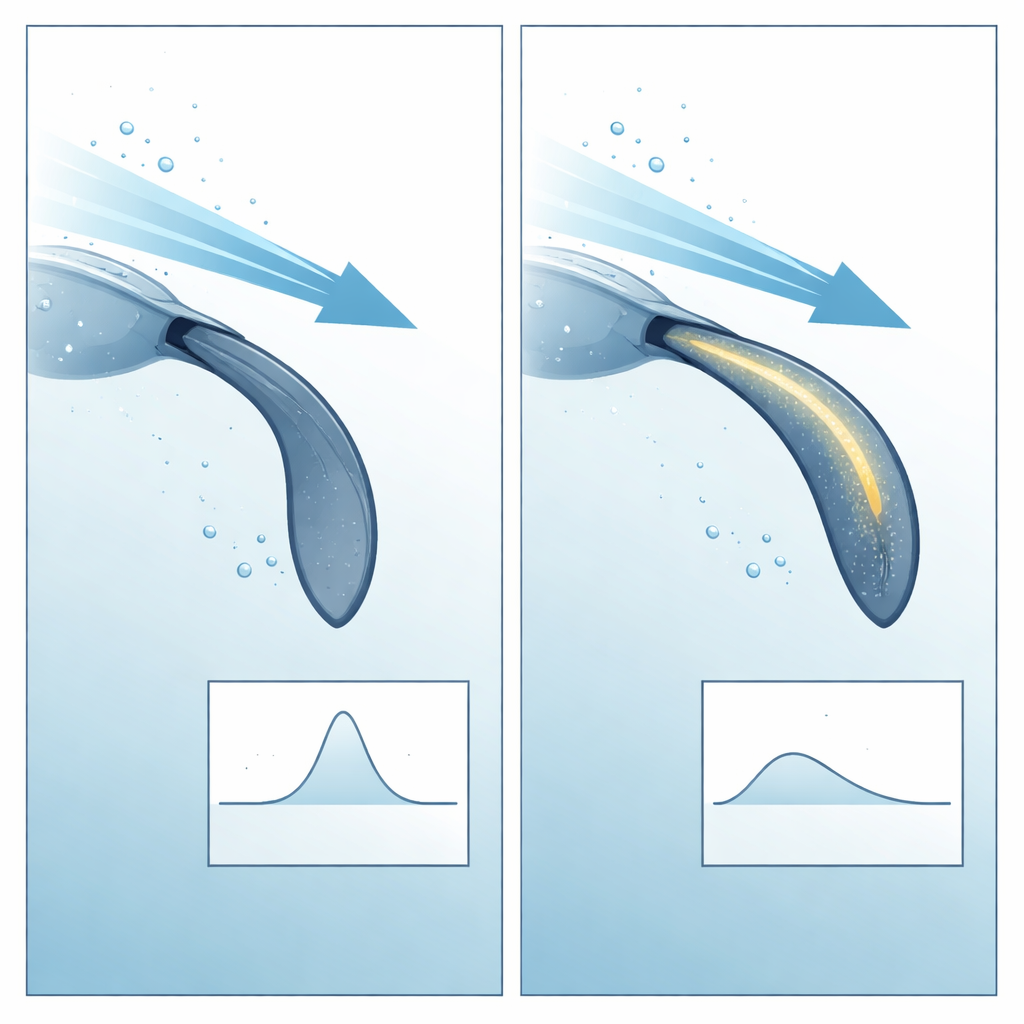
L’équipe a construit une demi-aile pour usage sous-marin qui associe une queue souple et pliable à un nez rigide. À l’intérieur de la section souple courent des tubes gonflables remplis de liquide, qui peuvent être pressurisés pour modifier la courbure, ou cambre, de l’aile. À l’extérieur, ils ont collé une fine « peau » électronique en silicone comportant des fils en métal-liquide. Lorsque l’aile se courbe, l’espacement entre ces conducteurs enfouis change, modifiant leur capacité électrique. En entraînant un modèle d’apprentissage automatique simple à associer ces signaux aux formes suivies par caméra, les chercheurs ont transformé la peau électronique en un capteur de forme très précis. Une fois entraîné, le système peut estimer le cambre de l’aile en temps réel sans caméras externes, même lorsqu’il est immergé.
Transformer la forme en commande
Avec cette aile proprioceptive montée dans un tunnel hydrodynamique, les chercheurs ont simulé des rafales comme des changements soudains de l’angle de l’aile par rapport à l’écoulement. D’abord, ils ont montré, dans des conditions stables, qu’en ajustant le cambre ils pouvaient produire la même portance à différents angles d’écoulement, ou des portances différentes au même angle. Cela signifie que lorsqu’une rafale tente de déstabiliser l’aile, il existe un « chemin » dans l’espace des formes qui peut restaurer la portance désirée. Ils ont ensuite programmé une réponse ouverte idéalisée — sachant exactement quand la rafale surviendrait — pour gonfler ou dégonfler les tubes aux bons moments. Dans ce meilleur des cas, modifier le cambre a réduit la chute de portance pendant une perturbation d’environ 50 % à environ 10 %.
Laisser l’aile réagir d’elle-même
Le test le plus exigeant consistait à laisser l’aile décider elle-même quand quelque chose n’allait pas. Ici la peau électronique détecte une « signature » caractéristique dans le signal de cambre : une surtension rapide suivie d’oscillations lorsque le corps souple fléchit sous un changement brusque d’écoulement. Lorsque ce motif apparaît, un contrôleur simple gonfle les tubes dans la direction la plus susceptible de ramener la portance vers son objectif, sans calculer explicitement l’écoulement ou les forces. Même cette stratégie minimaliste fonctionne bien. Comparée à une aile rigide équivalente, l’aile souple non actionnée seule réduit l’impulsion d’une rafale — essentiellement la poussée totale appliquée dans le temps — d’environ un facteur trois. Lorsqu’un contrôle actif est ajouté, l’impulsion indésirable totale de portance est réduite jusqu’à 87 %, se rapprochant et même dépassant la capacité de gestion des rafales rapportée pour certains oiseaux, bien que dans un milieu différent.
Pourquoi cela compte pour les robots du futur
Pour un lecteur non spécialiste, le message clé est que rendre les robots sous-marins plus souples et plus conscients d’eux-mêmes peut les rendre à la fois plus robustes et plus efficaces. Plutôt que de combattre les perturbations avec des moteurs à tout-va et des capteurs externes complexes, le corps flexible du robot et sa peau intégrée aident à absorber et à lire l’écoulement, déclenchant de modestes changements de forme qui le maintiennent sur sa trajectoire. Bien que cette étude se concentre sur une aile expérimentale unique dans un bassin contrôlé, les mêmes principes pourraient s’appliquer à des véhicules complets ou à des robots nageant comme des poissons. À long terme, une telle « intelligence incarnée » pourrait permettre aux machines d’explorer des océans turbulents avec la même grâce discrète que celle dont font déjà preuve les oiseaux et les poissons dans l’air et l’eau.
Citation: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Mots-clés: robotique souple, véhicules sous-marins, conception bioinspirée, rejet des perturbations d'écoulement, détection proprioceptive