Clear Sky Science · fr
Perception tactile incarnée des propriétés des objets mous
Pourquoi apprendre aux robots à ressentir est important
Imaginez un robot examinant délicatement l’abdomen d’un patient, triant des fruits mûrs sans les meurtrir, ou assemblant des pièces fragiles uniquement par le toucher. Pour accomplir cela en toute sécurité, les robots doivent apprendre à « ressentir » les objets mous de manière riche et proche de celle des humains. Cet article décrit comment des chercheurs ont construit une peau électronique et un nouveau type de modèle d’apprentissage afin que les robots puissent mieux percevoir la douceur, la forme et la texture de la surface des objets mous — rapprochant ainsi les machines d’un toucher réellement habile.
Construire un sens du toucher high‑tech
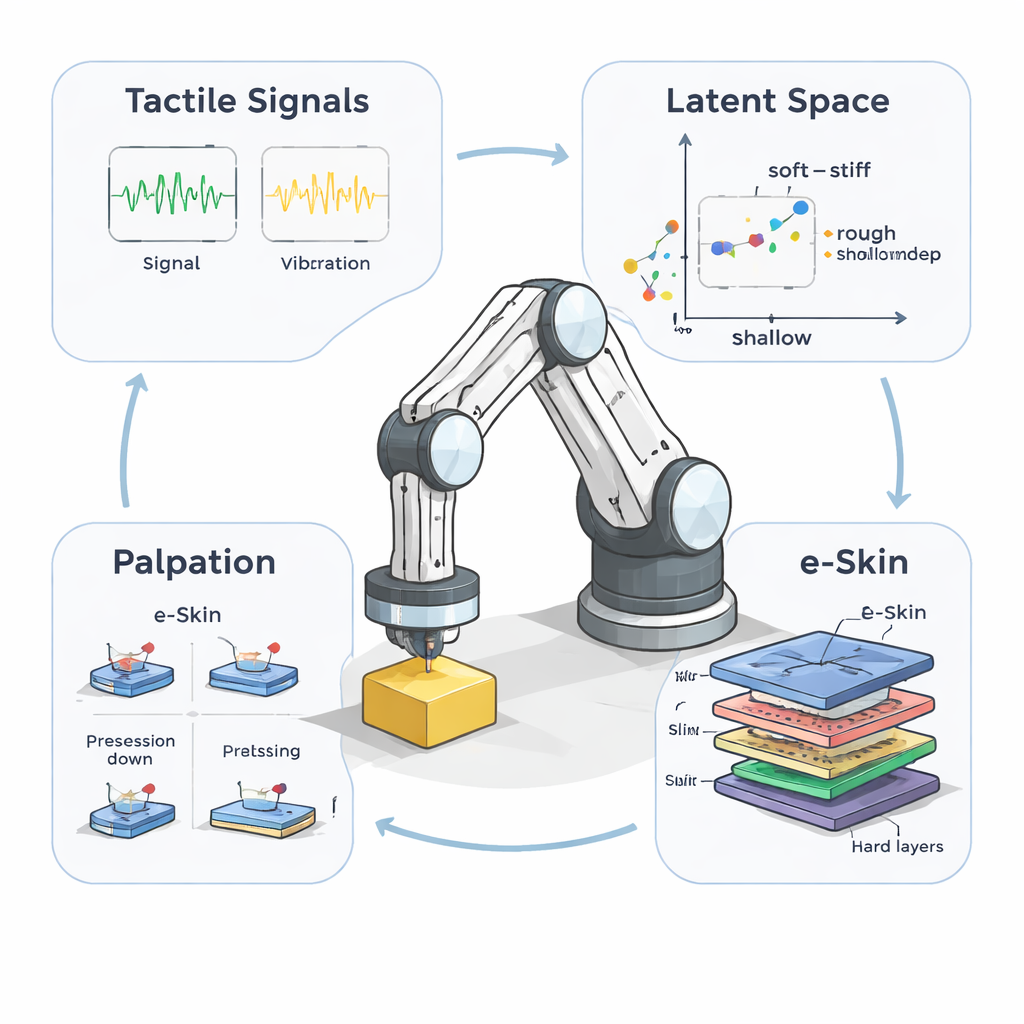
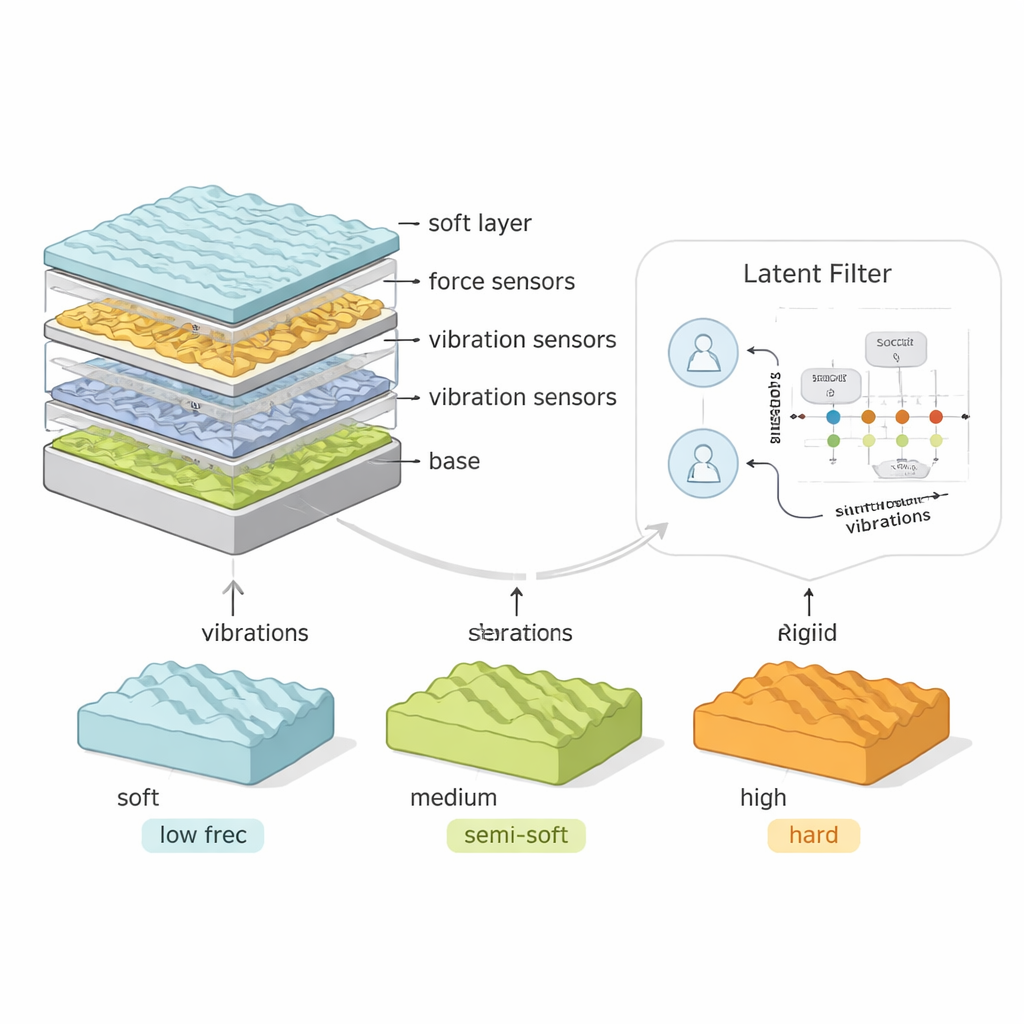
La peau humaine est souple, en couches, et riche en récepteurs tactiles qui réagissent à la pression, à l’étirement et aux vibrations. L’équipe a cherché à imiter ces capacités sur un robot. Ils ont créé une peau électronique modulaire, ou e‑Skin, composée de couches de silicone superposées avec des capteurs intégrés. Deux couches contiennent des grilles denses de capteurs de force qui mesurent l’enfoncement en différents points, tandis qu’une troisième couche abrite de petits accéléromètres qui captent les vibrations rapides, comme le bourdonnement que l’on sent en glissant un doigt sur un tissu rugueux. En échangeant les types de silicone, ils pouvaient rendre l’e‑Skin plus souple ou plus rigide, et en activant ou désactivant des couches de capteurs, ils pouvaient tester différentes combinaisons de « organes sensoriels ».
Concevoir un monde d’objets mous
Pour étudier le toucher de manière contrôlée, les chercheurs avaient besoin de plus que de simples blocs de caoutchouc. Ils ont créé une bibliothèque d’« objets ondulés » aux propriétés soigneusement réglées. Chaque objet avait une surface supérieure ondulée dont les bosses pouvaient être peu profondes ou hautes (amplitude) et rapprochées ou éloignées (fréquence spatiale), et chacun était moulé dans des matériaux allant du silicone très mou au plastique rigide. Certains échantillons cachaient aussi une fine couche rigide sous une surface souple, imitant des tissus ou des matériaux qui changent lorsqu’on appuie plus profondément. Cela a permis à l’équipe de connaître la douceur et la texture exactes de chaque objet que le robot touchait, afin de comparer ce que le robot « ressentait » avec la vérité expérimentale.
Apprendre aux robots à explorer par le toucher
Comme les humains qui poussent, pressent et glissent leurs doigts de manières différentes pour juger un objet, le robot a utilisé trois mouvements de palpation de base. Lors de la poussée, il se déplaçait verticalement pour sonder la douceur globale. En précession, il inclinait et faisait rouler l’e‑Skin, contactant plusieurs régions voisines et sondant des formes plus complexes. En glissement, il se déplaçait latéralement sur la surface pour révéler les textures fines et le frottement. Pour chaque objet, le robot a exécuté ces gestes avec des profondeurs et des vitesses variables, générant des milliers de signaux tactiles temporels — des forces changeant à travers la peau et des vibrations s’y propageant. Ces flux de données riches et dynamiques sont bien plus informatifs qu’un simple poke statique.
Découvrir des motifs cachés dans le toucher
Pour donner du sens à ce flux d’informations, les auteurs ont introduit un modèle d’apprentissage automatique qu’ils appellent le Filtre Latent. Plutôt que d’essayer d’étiqueter les objets directement, le modèle apprend une « carte » interne où chaque point résume l’interaction en cours du robot avec un objet. Cet espace latent est structuré de sorte que certaines composantes répondent rapidement aux signaux tactiles immédiats, tandis que d’autres intègrent l’information lentement au fil du temps. En entraînant le Filtre Latent sur de nombreuses interactions, l’équipe a montré que cette carte interne s’alignait naturellement sur des caractéristiques physiques signifiantes comme la rugosité de surface, la hauteur des bosses et la rigidité — même si le modèle n’a jamais reçu explicitement ces étiquettes. Une étape de régression séparée a confirmé que ces caractéristiques cachées pouvaient prédire les propriétés mécaniques réelles d’un objet avec une bonne précision.
Comment peau, capteurs et mouvement fonctionnent ensemble
Les expériences ont révélé qu’aucune couche de capteurs ni stratégie de mouvement unique n’est optimale pour toutes les situations. Combiner les informations de vibration et de force via une approche de « fusion tardive » — où chaque type de signal est traité séparément avant d’être fusionné — a fourni la compréhension la plus fiable des objets mous. Deux couches de force ont aidé le système à percevoir le cisaillement et l’étirement, essentiels pour détecter la rigidité et la structure interne cachée, tandis que les vibrations étaient particulièrement utiles pour sentir les textures fines lors du glissement. La souplesse mécanique de l’e‑Skin elle‑même importait aussi : des peaux plus rigides étaient meilleures pour mesurer la rigidité globale et la forme, tandis que des peaux plus souples excellaient à détecter de subtiles variations dans des matériaux conformables ou stratifiés. Les résultats suggèrent que le toucher robotique doit être co‑conçu : les propriétés de la peau, l’électronique de détection et les mouvements du robot doivent être ajustés ensemble.
Ce que cela signifie pour les robots du quotidien
En unissant une e‑Skin en couches inspirée de l’humain à un modèle d’apprentissage puissant qui respecte le rôle de l’action, ce travail montre comment les robots peuvent construire un sens du toucher plus profond. Plutôt que de se fier uniquement aux caméras ou à des seuils de force simples, les machines futures pourraient sentir comment un objet céde, vibre et change à mesure qu’elles l’explorent, puis ajuster leur prise ou leur mouvement en temps réel. De telles capacités sont essentielles pour des applications comme la palpation médicale, la manipulation d’aliments mous et la manipulation d’objets déformables dans les foyers et les usines. En termes simples, l’étude démontre que pour toucher le monde aussi efficacement que nous le faisons, les robots doivent non seulement disposer de bons capteurs, mais aussi du « corps » approprié, des habitudes de mouvement adéquates — et d’un moyen intelligent d’intégrer toutes ces informations en une compréhension cohérente de ce qu’ils ressentent.
Citation: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Mots-clés: toucher robotique, peau électronique, détection d'objets souples, perception tactile, robotique incarnée