Clear Sky Science · fr
Pinces robotiques miniatures imprimées en 3D et bon marché avec caméra intégrée pour la détection des forces et des moments par vision
Pourquoi les petites pinces souples comptent
Les robots deviennent plus petits et s’attaquent à des tâches plus délicates, de l’assemblage de minuscules engrenages à la cueillette de baies mûres sans les écraser. Pourtant, la plupart des mains robotiques serrent encore à l’aveugle, avec peu de retour sur la force exercée. Cet article présente une pince miniature imprimée en 3D à faible coût, surnommée « Seezer », capable à la fois d’attraper des objets fragiles et de « ressentir » les forces grâce à une minuscule caméra logée dans ses bouts de doigts, au lieu d’utiliser des capteurs de force coûteux.
Une main douce qui voit
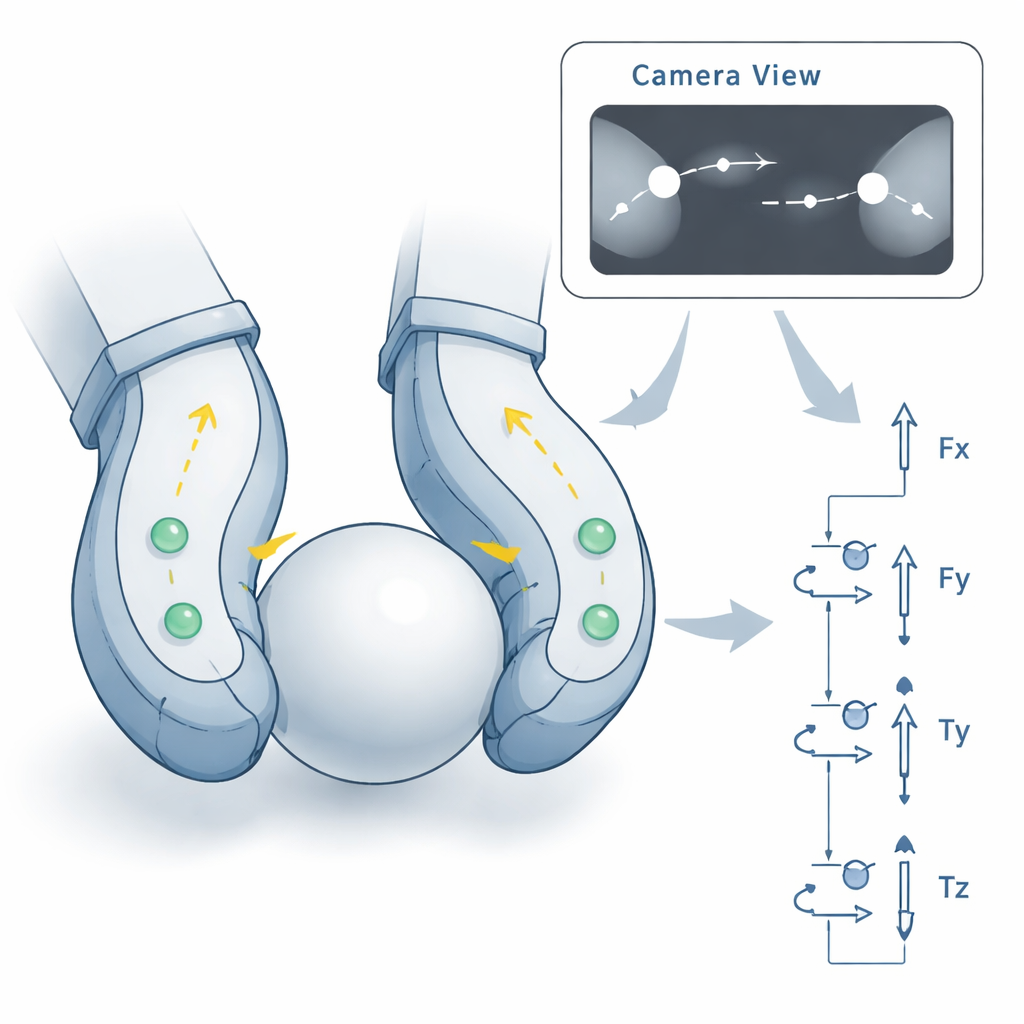
Le Seezer est une pince robotique souple et compliant dont les doigts se déforment plutôt que de pivoter comme des pinces métalliques. L’idée clé est de construire quasiment l’ensemble en une seule pièce sur une imprimante 3D grand public : une partie de doigt monolithique intégrant des articulations flexibles, des formes de bout de doigt adaptées à la tâche et de petites marques visuelles intégrées. Ce module de doigt jetable s’enfile sur une unité moteur compacte qui contient une caméra miniature et des éclairages. Lorsque le moteur entraîne un engrenage vis sans fin, les articulations flexibles se courbent et les doigts se referment autour d’un objet, tandis que la caméra surveille les bouts de doigts et l’espace devant la pince.

Lire la force à partir des courbures des doigts
Au lieu d’intégrer des fils, des jauges de contrainte ou des capteurs de pression dans les doigts, le Seezer enduit l’intérieur d’indices visuels riches en information. Chaque bout de doigt porte de petites marques rondes « fiduciales » dont la position dans l’image de la caméra change lorsque le doigt se déforme. Le logiciel détecte et suit d’abord ces marqueurs dans chaque image. Ensuite, à partir d’une courte séquence d’étalonnage, de simples modèles mathématiques apprennent comment les déplacements des marqueurs se rapportent aux forces de poussée et de traction réelles exercées sur chaque bout de doigt. En combinant les trois forces de bout de doigt avec la physique de base, le système estime les forces et les moments globaux agissant sur la pince dans les six directions, ainsi que la force de serrage entre les doigts.
Quelle est la qualité de la détection des forces
Pour évaluer la précision de cette détection par caméra, les auteurs ont comparé les estimations du Seezer aux mesures d’un capteur commercial de forces/moments haute précision dans une configuration de laboratoire contrôlée. Avec une version du dessin du doigt (embouts plus rigides), la pince a mesuré des forces de préhension allant jusqu’à environ 1,1 newton avec des erreurs typiques entre 8 % et 17 %, et des forces et moments six axes complets avec des erreurs majoritairement comprises entre 8 % et 24 %. Une version à bout de doigt plus souple a troqué la force maximale pour davantage de sensibilité, produisant des forces plus faibles mais des pourcentages d’erreur comparables. Fait important, les modèles n’avaient besoin que de 31 à 141 points de calibration — bien moins que les milliers d’images souvent requises par les méthodes d’apprentissage profond travaillant sur des images entières.
Des engrenages minuscules aux baies fragiles
Deux tâches de démonstration illustrent ce que cette pince peut accomplir en conditions réelles. Dans la première, le Seezer a retiré à plusieurs reprises de petits engrenages imprimés en 3D d’axes, les a déplacés et les a reposés, en utilisant la caméra interne à la fois pour aligner la clavette de l’engrenage avec l’axe et pour surveiller le mouvement des doigts. Cela imite un travail d’assemblage industriel fin dans des espaces restreints. Dans l’autre, la pince a récolté des groseilles rouges de leurs tiges. Ici, le système surveillait en temps réel la force de préhension estimée et arrêtait la fermeture dès qu’un seuil prédéfini était atteint, de sorte que la baie soit cueillie sans être écrasée. Les deux exemples fonctionnaient avec de l’électronique peu coûteuse et ont montré qu’une seule conception pouvait manipuler des objets rigides et souples de quelques millimètres de taille.
Défis et usages futurs
Le Seezer reste une preuve de concept et présente des limites. Le suivi des marqueurs fonctionne mieux dans des scènes stables et bien éclairées avec des arrière-plans peu encombrés ; des variations d’éclairage, des surfaces brillantes et des mouvements complexes peuvent provoquer des erreurs de suivi. La cadence d’image modeste de la caméra contraint aussi la rapidité de réaction du système pour un contrôle fin des forces ou un retour haptique riche. Les matériaux des doigts peuvent se fatiguer ou changer de comportement à l’usage prolongé, et l’équipe n’a pas encore testé systématiquement les performances sur de longues périodes. Les auteurs estiment que des algorithmes de suivi plus robustes ou la combinaison de leur matériel avec des estimateurs de force modernes basés sur l’apprentissage profond pourraient améliorer la précision et la fiabilité, tandis que les progrès de l’impression 3D devraient permettre une miniaturisation supplémentaire et des doigts jetables stérilisables pour un usage chirurgical ou de laboratoire.
Ce que cela signifie pour la robotique de tous les jours
En termes simples, ce travail montre qu’une petite main robotique et bon marché peut à la fois voir et sentir en observant la déformation de ses propres doigts souples. Avec seulement une calibration modeste et des pièces grand public, le Seezer estime la force de serrage et la direction des forces et des moments de contact, avec une précision suffisante pour des tâches de manipulation délicate. Si sa robustesse est améliorée, la même approche pourrait aider des robots futurs à manipuler de petits objets fragiles — comme des dispositifs médicaux, des composants électroniques, des fruits ou même des tissus en chirurgie mini‑invasive — sans capteurs encombrants ni matériel complexe, apportant un toucher sensible là où l’espace et le coût sont limités.
Citation: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Mots-clés: pince robotique souple, détection de force par vision, robotique imprimée en 3D, manipulation miniature, rétroaction haptique