Clear Sky Science · fr
Faire progresser la robotique douce : avancées récentes dans les actionneurs diélectriques à élastomère et à fluide
Des robots souples qui bougent comme des muscles
Imaginez un robot capable de serrer un enfant dans ses bras en toute sécurité, de se faufiler entre les décombres d’un bâtiment effondré ou de masser délicatement un cœur défaillant. Pour accomplir ces tâches, les machines doivent se plier et s’étirer comme les tissus vivants, et non pas cliqueter comme du métal. Cet article de synthèse explique comment une nouvelle classe de « muscles » électriques souples — composés de solides et de liquides caoutchouteux — rapproche cette vision de la réalité, et quels défis restent à franchir avant qu’ils ne quittent le laboratoire pour la vie quotidienne.
Des moteurs rigides aux muscles électriques souples
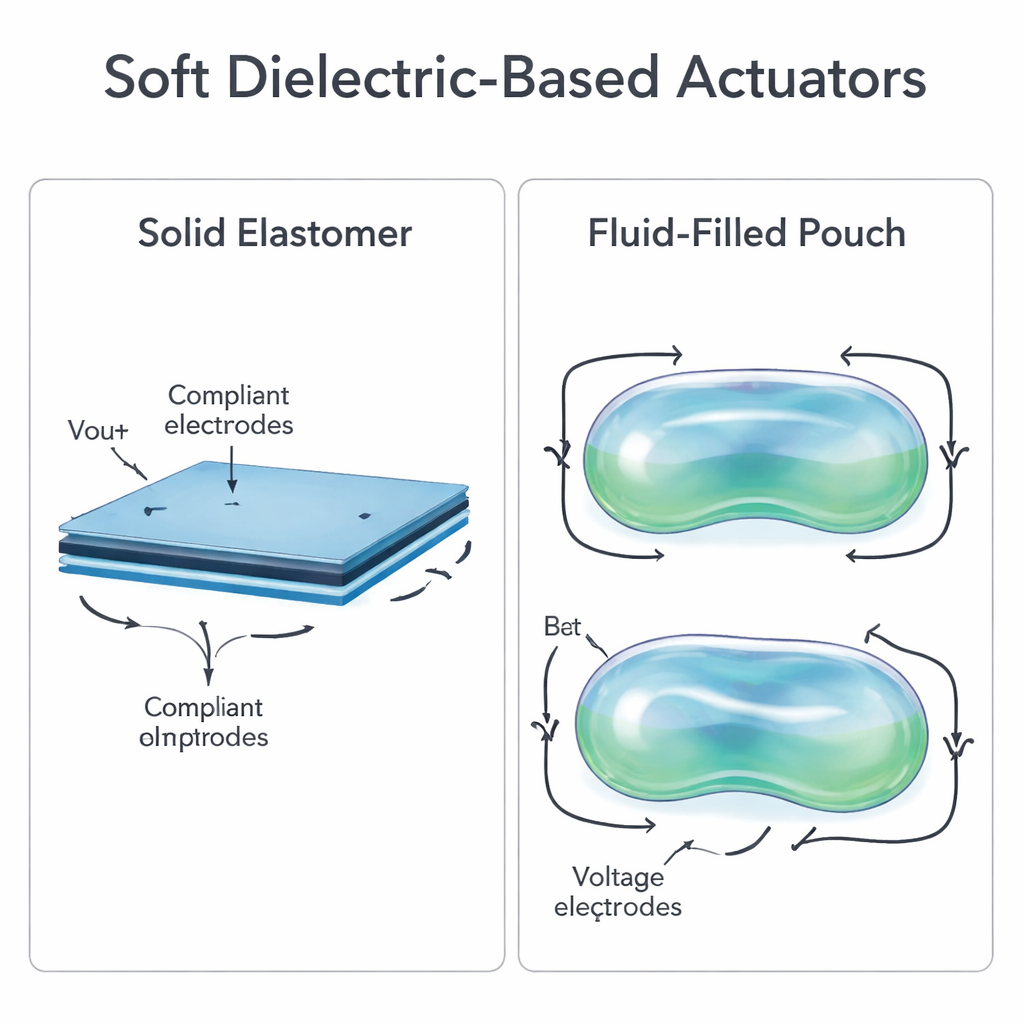
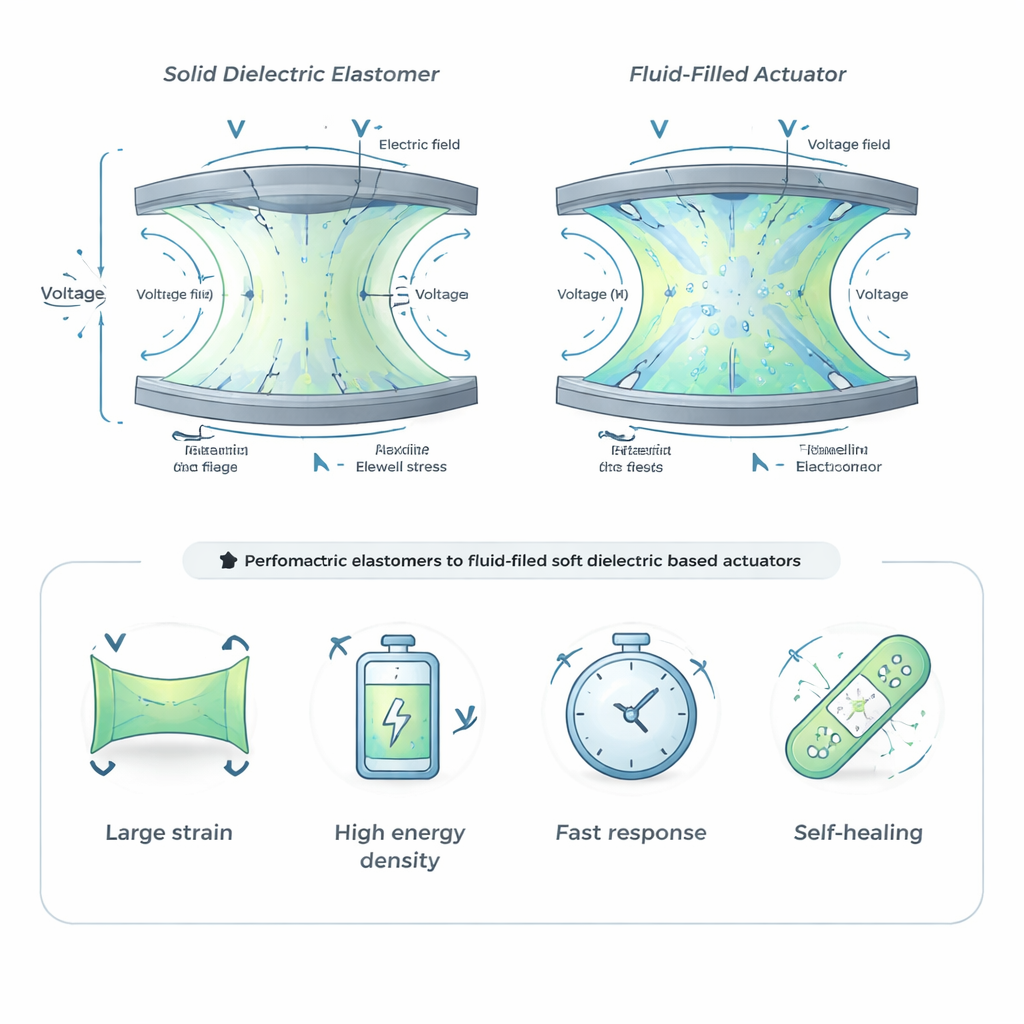
La plupart des robots industriels reposent sur des moteurs et des engrenages lourds et rigides. Ils sont puissants et précis, mais aussi coûteux, fragiles et potentiellement dangereux pour les personnes. Les robots souples, fabriqués à partir de matériaux extensibles semblables aux ustensiles en silicone ou aux élastiques, troquent la force brute pour la douceur, l’adaptabilité et la résilience. Cet article se concentre sur les actionneurs souples alimentés par l’électricité : les actionneurs à élastomère diélectrique (DEA), qui utilisent une couche de caoutchouc solide, et les actionneurs à fluide diélectrique (DFA), qui utilisent un liquide isolant fermé dans une poche flexible. Dans les deux cas, l’application d’une tension entre deux électrodes souples comprime le matériau par forces électrostatiques et convertit l’énergie électrique directement en mouvement, offrant de grandes déformations, une forte densité énergétique et une réponse rapide.
Comment les matériaux font fonctionner les muscles
Pour se comporter comme des muscles utiles, ces dispositifs nécessitent des matériaux très spécifiques. Pour les DEA, la feuille de caoutchouc centrale doit être extrêmement souple pour pouvoir s’étirer aisément, tout en résistant à de forts champs électriques sans se déchirer ni provoquer de court-circuit. Les chercheurs ajustent cet équilibre selon deux stratégies principales. L’une consiste à concevoir de nouveaux polymères — des acryliques, silicones et polyuréthanes jusqu’à des copolymères en blocs plus exotiques — qui incorporent de nombreux groupes chimiques polaires (améliorant la réponse électrique) dans des réseaux flexibles et de faible rigidité. L’autre consiste à créer des composites en mélangeant de minuscules particules ou des liquides qui augmentent la capacité du matériau à stocker l’énergie électrique. Une réflexion similaire guide la conception des DFA : les ingénieurs choisissent des huiles et autres liquides diélectriques avec la viscosité, la stabilité et la compatibilité appropriées avec des coquilles fines en plastique ou en silicone, de sorte que la tension puisse déplacer rapidement le fluide pour créer des renflements, des courses et des vibrations sans fuites ni dégradations chimiques.
Construire et piloter des actionneurs souples à grande échelle
Transformer ces matériaux ingénieux en dispositifs fiables relève d’un défi d’ingénierie à part entière. La fabrication traditionnelle implique souvent des étapes manuelles fastidieuses : étirer des films minces sur des cadres, peindre ou imprimer des électrodes souples, empiler des couches et — dans le cas des DFA — injecter le liquide et sceller la poche. L’article passe en revue des voies de fabrication plus récentes telles que l’impression jet d’encre et la sérigraphie, l’extrusion de muscles en fibres, et l’impression 3D multi‑matériaux capable de déposer électrodes et diélectriques en une seule étape. Il explique aussi comment différentes formes engendrent des mouvements variés : des patchs plats qui augmentent leur surface, des dômes qui se lèvent, des cylindres enroulés qui se contractent en longueur, et des structures qui se courbent ou vibrent. Comme ces matériaux peuvent vieillir, fuir ou céder par rupture électrique, les auteurs récapitulent les études sur la durée de vie et les modes de défaillance courants, et mettent en lumière l’effort pour concevoir des matériaux autoréparables capables de se remettre d’une étincelle ou d’une perforation.
Un contrôle plus intelligent et des usages émergents
Comme les muscles naturels, les actionneurs souples doivent être contrôlés. Des schémas ouverts simples injectent un motif de tension, mais celui‑ci peut dériver à mesure que le matériau chauffe ou se déforme de façon viscose. Des approches plus avancées intègrent des capteurs — ou exploitent les signaux électriques du propre actionneur — pour mesurer en temps réel la déformation, la force ou la vibration et ajuster le signal de commande en conséquence. Les chercheurs expérimentent aujourd’hui des contrôleurs basés sur l’apprentissage automatique et l’apprentissage par renforcement capables de gérer le comportement non linéaire et dépendant de l’histoire des matériaux souples. Côté applications, l’article explore un large paysage : des muscles artificiels qui soulèvent plusieurs fois leur propre poids, des robots semblables à des poissons ou des insectes qui nagent ou volent, des bandes haptiques portables et des capteurs au bout des doigts offrant un retour tactile réaliste, des optiques à focale variable et des peaux modulant la lumière inspirées des calmars et de l’œil humain, des surfaces morphables et des concepts de dispositifs médicaux susceptibles un jour d’aider des cœurs défaillants ou des visages paralysés.
Ce qui sépare encore les démonstrateurs de laboratoire des robots du monde réel
Malgré leur promesse, ces muscles électriques doivent encore franchir des obstacles avant de pouvoir alimenter en toute sécurité des aides domestiques, des implants médicaux ou des objets portables grand public. Beaucoup nécessitent des tensions de commande de l’ordre du kilovolt, ce qui complexifie la sécurité et l’électronique. Des matériaux qui excellent lors d’essais courts peuvent se raidir, se dessécher ou tomber en panne après des millions de cycles. La fabrication est souvent trop lente et inégale pour une production à grande échelle. Et il reste difficile de recycler ou de biodégrader la plupart des polymères actuels. Les auteurs soutiennent que le progrès dépendra d’une conception conjointe à toutes les échelles : de nouveaux matériaux souples combinant faible rigidité, forte réponse électrique, robustesse et même autoréparation ; une fabrication et des tests automatisés guidés par les données ; et des systèmes de contrôle qui exploitent la détection intégrée et une IA légère. Ensemble, ces avancées pourraient doter les robots du futur de muscles non seulement puissants et rapides, mais aussi sûrs, adaptatifs et durables.
Citation: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Mots-clés: robotique douce, actionneurs à élastomère diélectrique, actionneurs à fluide diélectrique, muscles artificiels, interfaces haptiques