Clear Sky Science · fr
Contrôle de jeu prédictif pour une assistance interactive personnalisée et ciblée
Des robots qui ressemblent à de bons partenaires d’entraînement
Imaginez un partenaire d’exercice ou un kinésithérapeute qui sait toujours quand vous aider à lever un poids, quand vous laisser lutter un peu et à quelle vitesse vous comptez bouger ensuite. Cet article montre comment doter des robots en contact—comme des exosquelettes utilisés en rééducation ou en usine—d’une intuition comparable. En « devinant » mathématiquement l’intention de mouvement d’une personne pour la seconde ou les deux prochaines, le robot peut partager l’effort en douceur, réduire la fatigue et orienter subtilement les mouvements et l’apprentissage.
Pourquoi partager l’effort avec des robots est difficile
Quand un robot est physiquement relié à une personne—l’aidant à bouger un membre ou à porter un objet lourd—les deux poussent et réagissent en permanence. Les contrôleurs robotiques traditionnels ignorent en grande partie ce que l’humain prévoit de faire ; ils visent seulement des objectifs de performance comme la précision ou l’économie d’énergie. Cela peut rendre le robot trop raide et autoritaire, ou trop passif et peu aidant. De vrais partenaires humains font mieux : ils perçoivent comment l’autre bouge, s’adaptent à ses capacités et encouragent des comportements variés, de la détente à l’effort intense. Les auteurs soutiennent que pour rapprocher les robots de ce type d’interaction, le robot doit modéliser explicitement comment l’humain planifie ses mouvements et combien d’effort il est prêt à fournir.
Une vision théorique des jeux appliquée à l’interaction homme–robot
Les chercheurs s’appuient sur la théorie des jeux—les mathématiques de l’interaction stratégique—pour considérer l’humain et le robot comme deux « joueurs » partageant la même tâche. Chacun a ses propres objectifs : l’humain veut suivre le mouvement désiré en dépensant le moins d’effort possible, et le robot veut aider à suivre le mouvement tout en réduisant l’effort de la personne. Fait crucial, on suppose que les deux ne regardent que sur un court horizon temporel, une fenêtre de planification d’environ une à deux secondes, ce qui reflète la façon naturelle dont les gens planifient leurs mouvements. Dans cette fenêtre, l’équipe dérive une formule compacte pour un équilibre de Nash : un schéma de forces équilibré où ni l’humain ni le robot ne peuvent améliorer leur résultat sans que l’autre change aussi. Cet équilibre définit combien chacun doit pousser à chaque instant.
Apprendre au robot à lire l’intention humaine
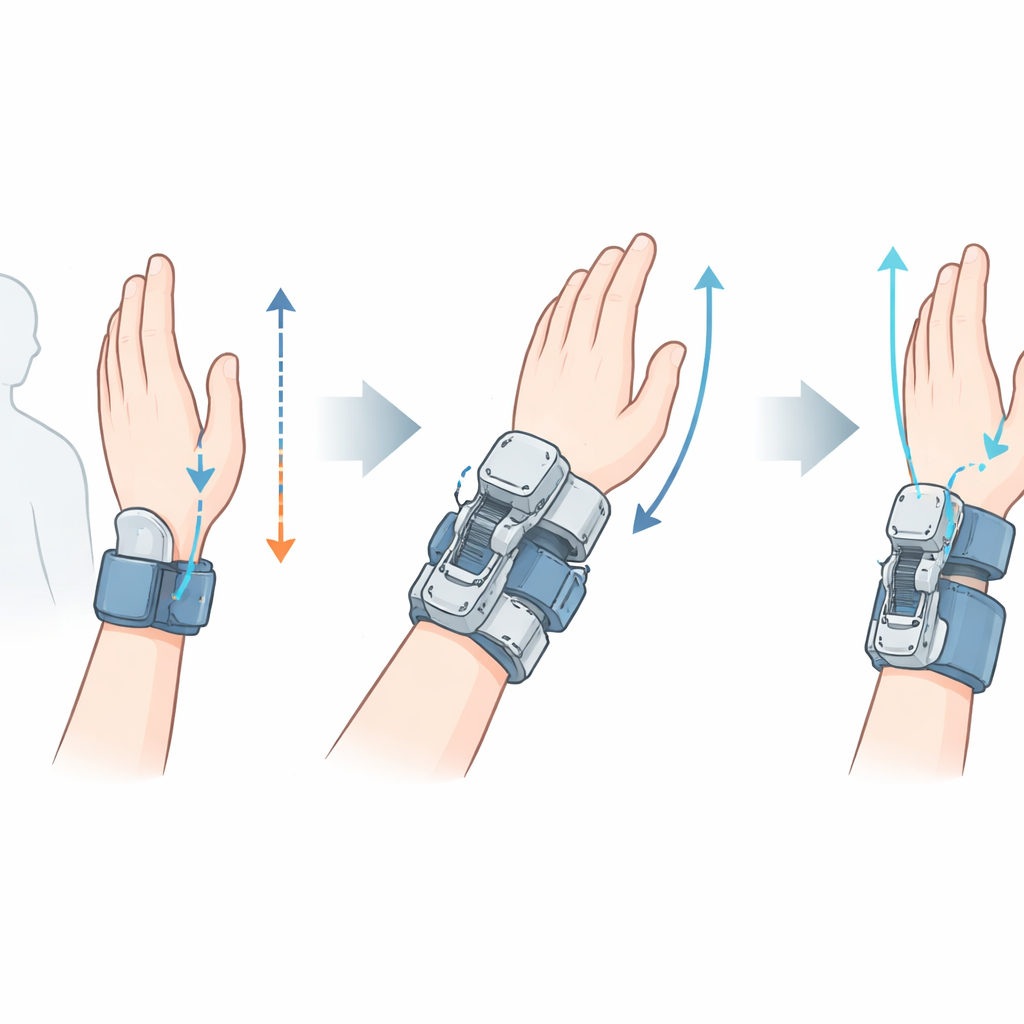
Pour que le robot joue à ce « jeu du mouvement », il doit d’abord déduire à quel point l’humain privilégie la précision par rapport à l’effort—une préférence cachée qui varie d’une personne à l’autre et au fil du temps. Les auteurs résolvent cela avec une approche de jeu inverse. Pendant que la personne bouge, des capteurs mesurent l’angle des articulations et le couple produit. Le contrôleur recherche ensuite de manière répétée l’ensemble de préférences humaines qui expliquerait le mieux l’historique récent des mouvements et des forces. Avec ces préférences en main, il prédit comment l’humain est susceptible d’agir sur le court horizon suivant et calcule la force d’assistance optimale du robot. Tout cela fonctionne en temps réel sur un exosquelette de poignet qui aide les sujets à suivre une cible en mouvement avec la main.
Humains et robots apprennent à se coordonner
L’équipe a testé leur contrôleur avec trente adultes en bonne santé dans trois expériences. Dans la première, on demandait aux personnes d’alterner entre suivre activement la cible et rester passives. Le contrôleur ajustait rapidement son estimation interne de l’importance que la personne accordait à la précision, augmentant pendant les phases actives et chutant presque à zéro lorsqu’elle se relaxait. Dans la deuxième expérience, les participants alternaient entre essais avec et sans assistance robotique. Avec le nouveau contrôleur, le robot a réduit l’effort articulaire et l’activité musculaire des humains, tout en améliorant la précision du suivi. Au fil des essais répétés, le schéma d’interaction de chaque personne s’est stabilisé en un « équilibre » individuel, et la corrélation entre les forces humaine et robot a augmenté—preuve d’une compréhension mutuelle croissante. Dans la troisième expérience, les chercheurs ont introduit un unique bouton d’assistance, un méta-paramètre qui fait varier l’intensité avec laquelle le robot cherche à minimiser l’effort de la personne. Tourner ce bouton modifiait progressivement l’effort que les humains choisissaient d’apporter, sans détériorer la performance de la tâche.
Orienter le comportement avec une seule molette
Le méta-paramètre d’assistance permet aux concepteurs de couvrir un spectre de styles d’interaction avec un seul réglage : d’une aide quasi nulle, en passant par un partage égal de l’effort, jusqu’à un soutien quasi complet où le robot guide et l’humain peut se relâcher. À des réglages intermédiaires, les humains coordonnaient le mieux avec le robot, chacun portant à peu près la moitié de la charge. Le schéma des préférences humaines inférées restait cohérent pour chaque personne à travers différents niveaux d’assistance—sauf lorsque le robot faisait presque tout, où les comportements devenaient plus homogènes parce que les gens cessaient largement de s’engager. Cela montre que le robot peut à la fois révéler des styles de contrôle individuels et les influencer en douceur, par exemple en demandant aux utilisateurs d’en faire plus pendant une phase d’entraînement et moins pendant une autre.
Qu’est-ce que cela change pour la rééducation et le travail
Pour le non-spécialiste, le message clé est que ce contrôleur fait agir les robots davantage comme des partenaires intelligents que comme des machines rigides. En prédisant nos intentions de mouvement et en ajustant leur niveau d’aide, les robots peuvent réduire notre effort lorsque c’est nécessaire, nous encourager à fournir plus d’effort quand c’est utile, et maintenir la précision et la stabilité des mouvements. Le même cadre mathématique peut être adapté pour la rééducation—en transférant progressivement l’effort du robot vers le patient—ou pour la fabrication collaborative, où humains et robots partagent des charges de manière sûre et efficace. En somme, l’étude montre que les personnes s’adaptent naturellement à un robot qui « joue le même jeu », ouvrant la voie à des formes d’assistance interactive plus personnalisées et ciblées.
Citation: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Mots-clés: interaction homme-robot, assistance par exosquelette, contrôle basé sur la théorie des jeux, rééducation motrice, contrôle partagé