Clear Sky Science · fr
Suivi et contrôle pilotés par rayons X synthétiques de dispositifs médicaux miniatures
Outils plus petits, interventions plus sûres
Les chirurgiens commencent à utiliser de minuscules outils médicaux sans fil qui peuvent se déplacer dans les vaisseaux sanguins et d’autres passages étroits pour délivrer des médicaments, déboucher des artères ou mesurer des signaux vitaux en profondeur dans le corps. Ces dispositifs miniatures promettent des procédures moins traumatisantes et une récupération plus rapide — à condition que les médecins puissent les voir et les piloter en toute sécurité en temps réel. Cet article présente MicroSyn-X, une nouvelle méthode pour entraîner des ordinateurs à suivre ces petits dispositifs sur des images de rayons X, ouvrant la voie à des interventions plus précises et moins invasives.
Le problème des aides invisibles
L’outil d’imagerie dominant en chirurgie est aujourd’hui la fluoroscopie aux rayons X, qui affiche à l’écran des silhouettes en mouvement des os, des vaisseaux et des instruments. Les dispositifs miniatures, toutefois, sont si petits et peu contrastés qu’ils se fondent souvent dans un arrière-plan bruyant. Ils peuvent être masqués par l’os, des outils métalliques ou des produits de contraste, et les robots souples ou liquides changent constamment de forme lorsqu’ils se déplacent. Les opérateurs humains doivent surveiller l’écran attentivement et ajuster aimants ou cathéters manuellement, un processus lent et fatigant qui expose à des erreurs. Entraîner la vision par ordinateur — des logiciels capables de « voir » par eux-mêmes — pourrait aider, mais cela requiert généralement d’énormes collections d’images soigneusement annotées. Pour ces nouveaux dispositifs, de tels jeux de données sont presque inexistants car leur collecte est coûteuse, longue et limitée par la confidentialité des patients.
Apprendre aux ordinateurs avec des rayons X faux, mais fidèles
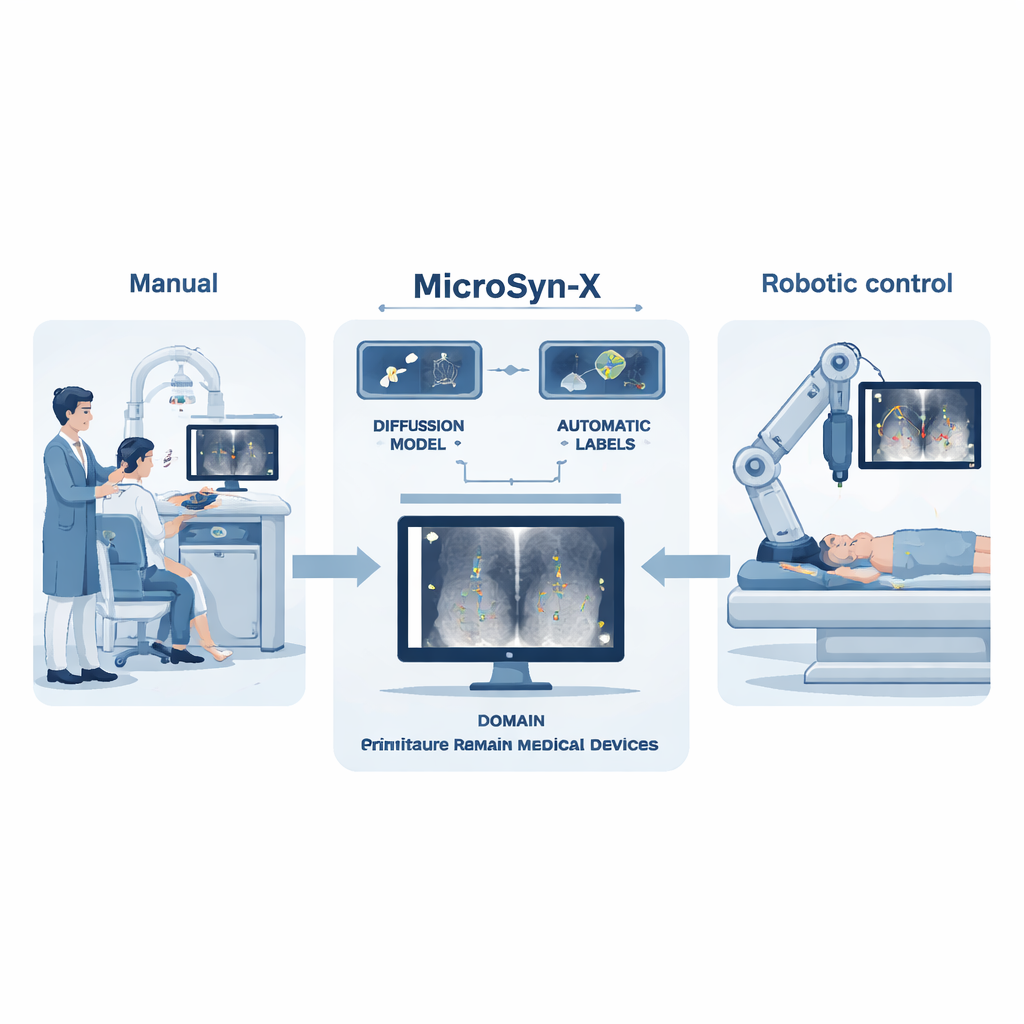
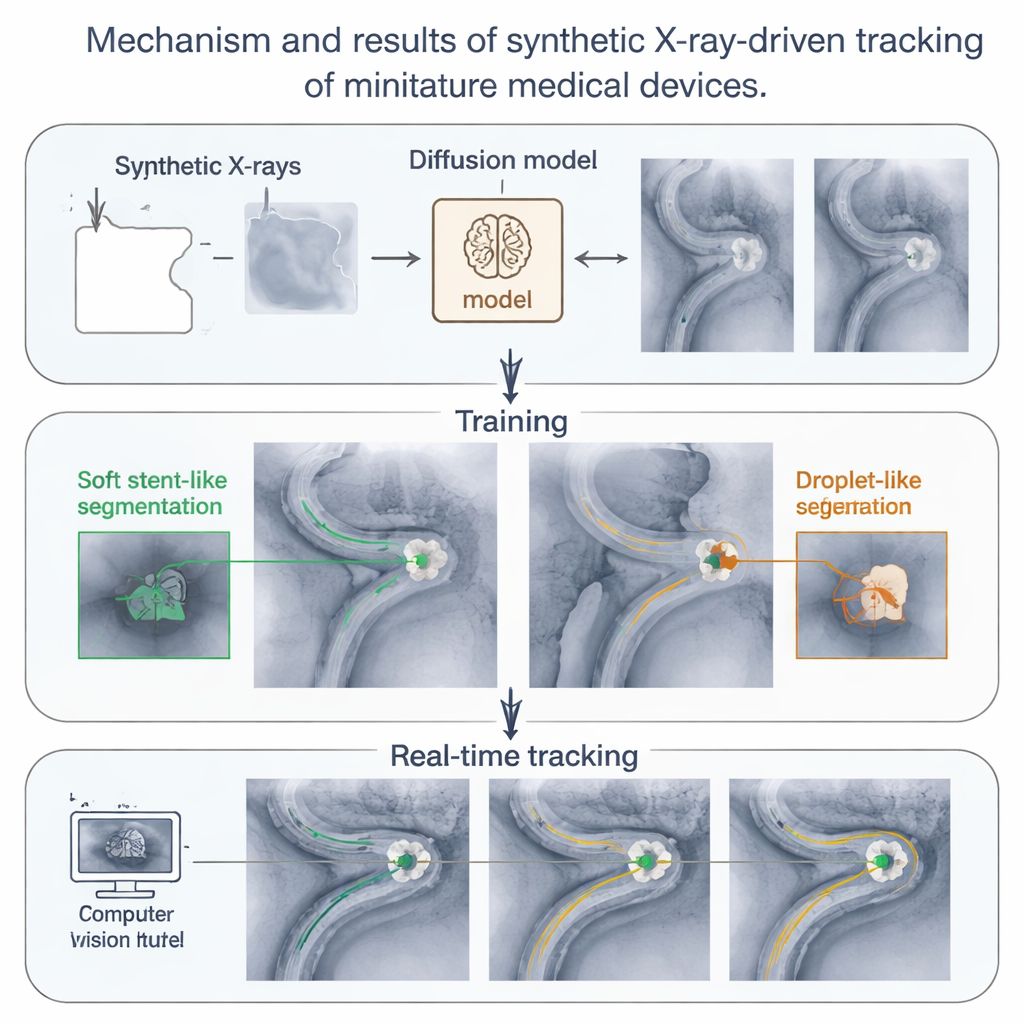
MicroSyn-X résout ce goulot d’étranglement des données en créant ses propres images de rayons X très réalistes, complètes avec des annotations intégrées qui indiquent précisément à l’algorithme d’apprentissage où se trouve chaque dispositif. D’abord, le système utilise un générateur d’images moderne appelé modèle de diffusion pour produire des arrière-plans de rayons X réalistes d’organes, d’os et d’outils chirurgicaux, guidé par des invites simples et des masques approximatifs qui délimitent les tissus, le métal et les canaux remplis de liquide. Ensuite, des images des dispositifs miniatures — soit photographiées une fois sur un fond propre, soit décrites mathématiquement pour les gouttes liquides — sont fusionnées numériquement dans ces scènes de manière à donner l’impression qu’elles se trouvaient vraiment à l’intérieur du corps. Parce que l’ordinateur sait exactement où chaque dispositif a été placé, il génère automatiquement des contours et des boîtes englobantes précis, éliminant l’annotation manuelle fastidieuse.
Se préparer au monde réel par le chaos contrôlé
Une innovation clé de MicroSyn-X est la « randomisation de domaine », une injection délibérée de variété dans les images synthétiques. Le système modifie automatiquement les formes des organes, les positions des dispositifs, la luminosité, le niveau de bruit et même le degré de masquage par les os ou les outils. Il crée aussi de nombreuses formes différentes pour les robots liquides, qui peuvent s’étirer, se diviser en essaims et se rejoindre. En confrontant l’algorithme d’apprentissage à des milliers de situations légèrement différentes — dont beaucoup sont rares ou impraticables à capturer chez de vrais patients — les auteurs entraînent des modèles qui se concentrent sur les indices visuels essentiels des dispositifs plutôt que sur des motifs superficiels. Les tests montrent que des modèles entraînés uniquement sur ces images synthétiques peuvent égaler ou dépasser des modèles entraînés sur des rayons X réels, notamment dans des cas difficiles à faible contraste, fort bruit ou occlusion importante.
De l’écran d’ordinateur au robot en salle d’opération
Les chercheurs vont au-delà de démonstrations logicielles et relient MicroSyn-X directement à un système robotique. Un bras robotique maintient un aimant puissant près des tissus tandis qu’une machine de fluoroscopie en C capture des images radiographiques. Le modèle de vision entraîné par MicroSyn-X détecte des robots souples en forme d’endoprothèse et des gouttelettes liquides dans chaque image, et un algorithme de suivi assemble ces détections en trajectoires lisses, même lorsque les dispositifs disparaissent brièvement derrière l’os. Grâce à ce retour d’information, le robot guide les dispositifs à travers des vaisseaux artificiels sinueux, de véritables organes animaux en dehors du corps et des artères vivantes chez des lapins et des rats. Le système dirige avec succès plusieurs dispositifs simultanément, les suit à travers des vaisseaux ramifiés et surveille des essaims de gouttelettes liquides qui se divisent et se rejoignent sous contrôle magnétique — le tout en temps réel dans des conditions d’imagerie difficiles.
Vers des soins plus intelligents et moins invasifs
En termes simples, ce travail montre que des ordinateurs peuvent apprendre à suivre en toute sécurité de minuscules outils chirurgicaux à l’intérieur du corps en s’entraînant sur d’énormes bibliothèques de radiographies « fausses » soigneusement conçues plutôt que sur des images réelles rares. MicroSyn-X transforme l’imagerie synthétique en un moteur pratique pour la robotique : il crée des données d’entraînement réalistes, forme des modèles de vision et alimente leur sortie dans un système de navigation magnétique qui a déjà fonctionné sur des animaux vivants. À mesure que ces méthodes mûrissent et sont testées sur des cas plus complexes, elles pourraient aider les chirurgiens à réaliser des interventions délicates avec plus de précision et moins de fatigue, nous rapprochant d’un avenir où des flottes de robots miniatures améliorent discrètement les traitements de l’intérieur.
Citation: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Mots-clés: dispositifs médicaux miniatures, imagerie par rayons X, données synthétiques, robotique médicale, vision par ordinateur