Clear Sky Science · fr
Un réseau d’interaction emboîté améliore la réactivité dans le comportement collectif
Comment les foules animales restent si parfaitement synchronisées
De grands groupes d’animaux semblent souvent tourner, esquiver ou fuir comme s’ils formaient un seul organisme. Cet article examine comment la structure cachée du « qui suit qui » au sein d’un groupe de poissons — et au sein d’essaims de robots qui s’en inspirent — permet à l’ensemble du groupe de réagir rapidement et de manière fiable lorsque les conditions changent.
Couches de guidage à l’intérieur d’une foule en mouvement
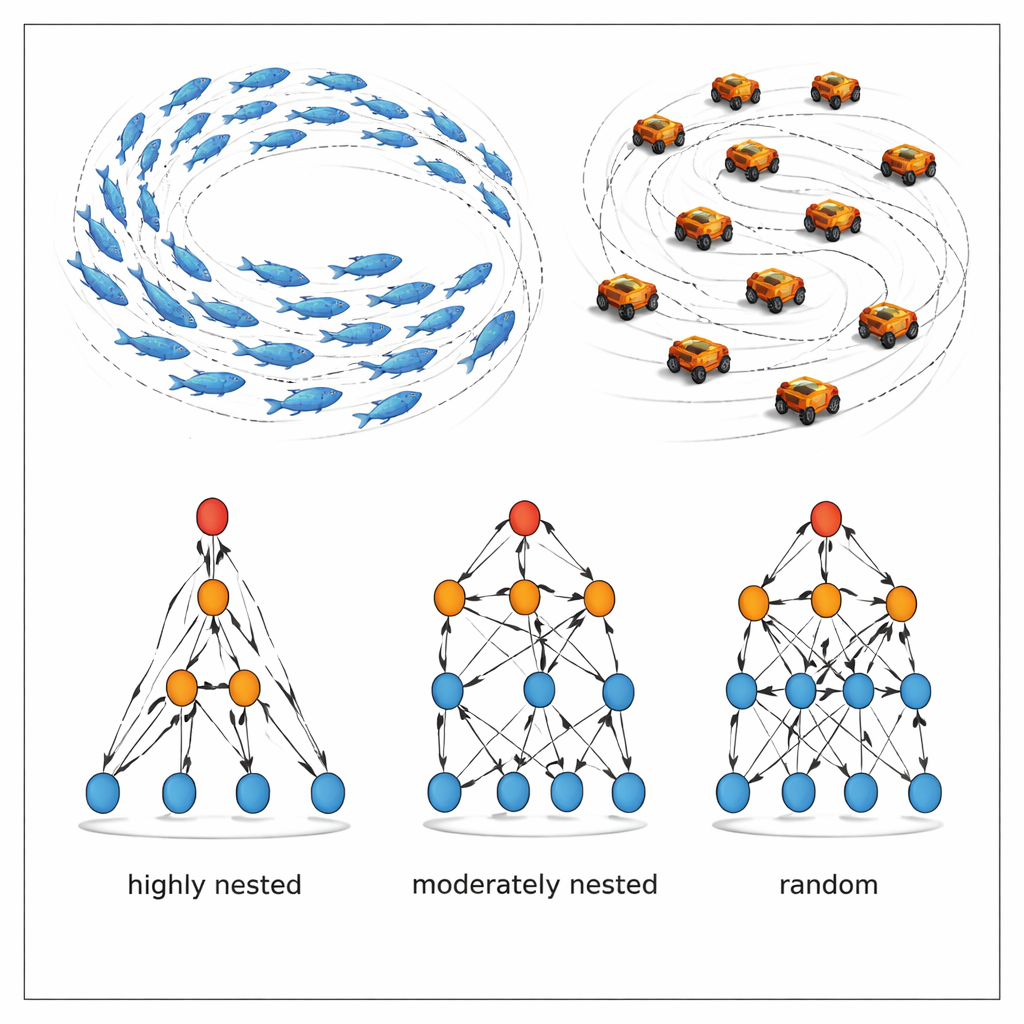
Quand on observe une école de poissons s’éloigner en tourbillonnant d’un danger, il est tentant de penser que chaque poisson copie simplement ses voisins en même temps. Les auteurs montrent que la réalité est plus subtile : il existe un schéma invisible de guidage dans lequel certains poissons influencent beaucoup d’autres, tandis que d’autres suivent principalement. Ce schéma n’est pas un ordre strict de dominance, mais un réseau flexible de liens leader–suiveur qui change selon le type de mouvement effectué par le groupe. La caractéristique structurelle clé étudiée par les chercheurs s’appelle la « nestedness » (emboîtement) : les leaders de niveau supérieur ne se contentent pas de guider leurs suiveurs directs, ils guident aussi indirectement de nombreux poissons de niveaux inférieurs plus loin dans la chaîne.
Ce que les bancs de poissons révèlent sur les manœuvres rapides
L’équipe a filmé de petits bancs de tetra à nez rouge nageant dans un bassin circulaire peu profond, en suivant la position et l’orientation de chaque poisson au fil du temps. À partir de ces trajectoires, ils ont reconstruit qui a tendance à bouger en premier et qui réagit plus tard, construisant un réseau dirigé d’influence pour chaque groupe. Ils ont également mesuré à quel point l’école tournait brusquement (courbure) et à quel point les poissons étaient alignés (polarisation). Ils ont constaté que lorsque le groupe exécutait des manœuvres rapides et sinueuses avec de fréquents changements de direction, le réseau sous-jacent était fortement emboîté : quelques poissons influençaient beaucoup d’autres, et le motif d’influence ressemblait à une cascade triangulaire nette. En revanche, lorsque l’école glissait régulièrement dans une direction, le réseau était moins emboîté et plus égalitaire, même si les poissons restaient bien alignés.
Tester le flux d’information dans des réseaux idéalisés
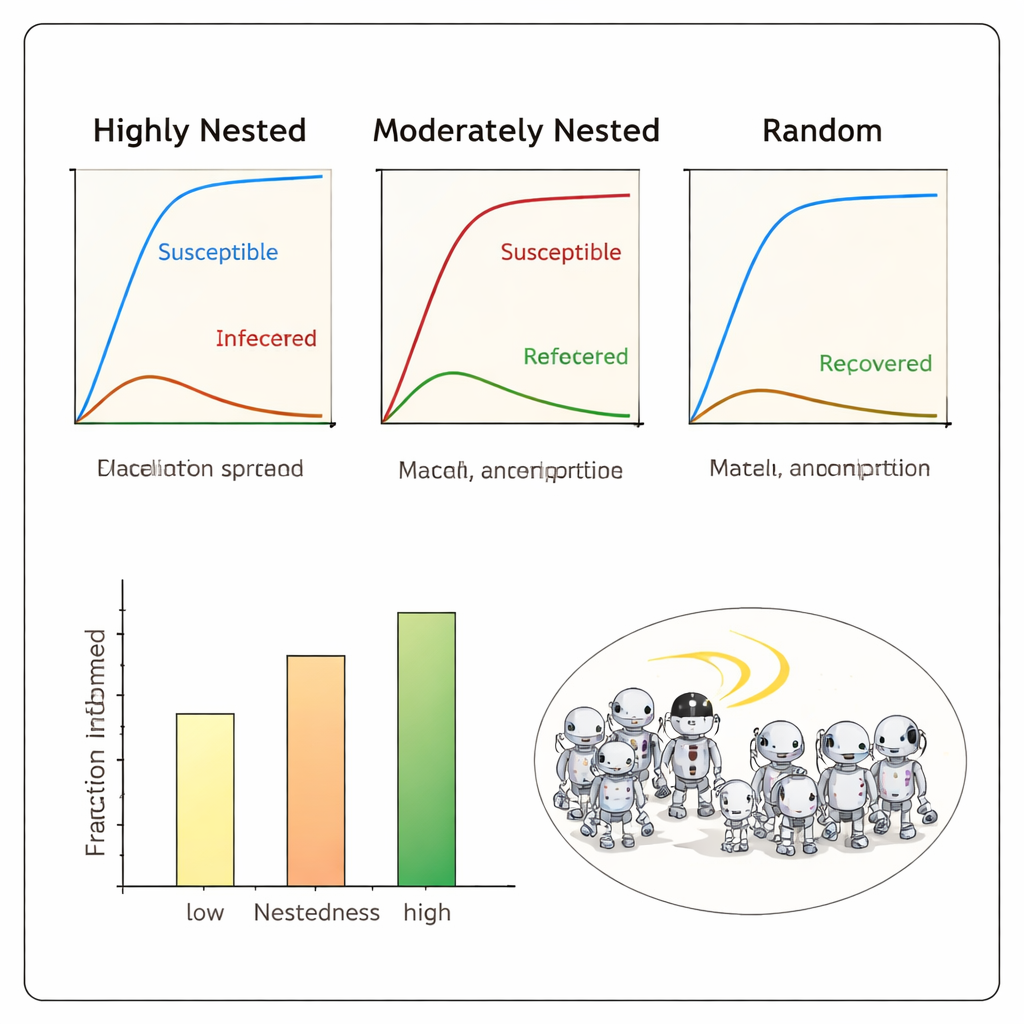
Pour comprendre pourquoi les structures emboîtées pourraient aider, les auteurs ont utilisé un modèle simple de propagation souvent employé pour les épidémies. Ici, qu’un nœud devienne « infecté » signifie qu’il a capté et transmet un signal directionnel, pas une maladie. Ils ont comparé des réseaux leader–suiveur parfaitement emboîtés à des réseaux partiellement emboîtés et à des réseaux aléatoires, en maintenant le même nombre total de connexions. Dans le cas le plus emboîté, un signal semé au sommet atteignait rapidement presque tous les nœuds, et ce même lorsque les nœuds se « rétablissaient » (arrêtaient de transmettre) relativement vite. À mesure que le réseau était randomisé et que l’emboîtement diminuait, le signal s’enlisait : de nombreux nœuds restaient non informés, le nombre maximal d’émetteurs actifs chutait, et le modèle nécessitait beaucoup plus de sources initiales pour atteindre la même couverture.
Des équations aux foules robotiques qui tournent
L’étude a ensuite demandé si ces avantages structurels se traduisaient en mouvements réels. Les auteurs ont construit un modèle d’essaim « auto‑propulsé » dans lequel chaque individu choisit qui suivre en fonction de l’impact du mouvement d’un voisin, mais avec une particularité : la règle favorise la formation d’une hiérarchie emboîtée, où les acteurs plus « saillants » deviennent leaders pour beaucoup d’autres. Ils ont comparé ce schéma parfaitement emboîté à deux alternatives courantes : une où chaque voisin a le même poids, et une autre où les influences sont pondérées de façon continue par des indices de mouvement. Dans des groupes simulés chargés d’effectuer des virages répétés et amples commandés par quelques individus informés, le schéma emboîté a permis à la foule de suivre le schéma d’orientation cible plus fidèlement et avec des délais plus courts, même quand un bruit substantiel était ajouté au mouvement.
Des robots réels agissant comme des poissons en banc
Enfin, les chercheurs ont implémenté leur contrôle par réseau emboîté sur cinquante petits robots à roues se déplaçant sur une aire plane. Lors d’une tâche de « survol », un seul robot informé essayait de maintenir le groupe en train de circuler autour d’une zone. Avec une règle conventionnelle de voisins pondérés, la trajectoire de l’essaim était douce et lente, ne montrant que de faibles courbes. Avec la règle emboîtée, les robots effectuaient des virages plus nets et plus décisifs, suivant de près les changements du robot informé. Dans une tâche de « suivi », où un robot informé effectuait des variations directionnelles imprévisibles, l’essaim contrôlé par l’emboîtement restait de nouveau plus proche tant en position qu’en orientation, tandis que l’essaim de comparaison lissait ou manquait beaucoup de ces virages.
Pourquoi cela importe au‑delà des poissons et des robots
En termes concrets, le travail montre que la façon dont une foule est câblée compte autant que la sensibilité de ses membres. Un réseau d’influence fortement emboîté — une chaîne stratifiée où des leaders de haut niveau atteignent beaucoup d’autres — permet aux groupes de réagir plus vite et plus sûrement aux signaux importants, sans être submergés par le bruit. Ces idées peuvent aider les biologistes à interpréter les essaims animaux, guider la conception d’équipes de drones ou de robots sous‑marins qui doivent répondre rapidement dans des environnements risqués, et même éclairer la manière dont nous organisons des réseaux humains lorsque des actions coordonnées et rapides sont essentielles.
Citation: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Mots-clés: comportement collectif, école de poissons, robotique en essaim, transfert d'information, hiérarchie de réseau