Clear Sky Science · fr
Système de filtrage de Kalman multi-étages pour la fusion de capteurs intégré à un memtransistor en MoS2 présentant 1024 niveaux de conductance
Des capteurs plus intelligents pour des voitures autonomes plus sûres
Les voitures autonomes modernes s’appuient sur une nuée de capteurs pour comprendre la route, mais fusionner toutes ces informations rapidement et efficacement est étonnamment difficile. Cette étude montre comment un nouveau type de composant électronique minuscule, appelé memtransistor, peut accélérer et simplifier ce processus de fusion de capteurs. En transférant des calculs clés depuis des puces numériques volumineuses vers du matériel analogique épuré, les chercheurs réduisent fortement la consommation d’énergie et la latence, ouvrant la voie à des systèmes autonomes plus sûrs et plus réactifs capables de faire face aux intempéries, aux vues obstruées et aux rues encombrées.
Pourquoi plusieurs yeux valent mieux qu’un
Sur les pistes d’essai et les autoroutes d’aujourd’hui, les véhicules autonomes observent le monde à l’aide d’un mélange de caméras, de télémétrie laser (LiDAR), de radar millimétrique et de capteurs de mouvement qui suivent le déplacement du véhicule. Chacun possède ses forces et ses faiblesses : le LiDAR peut être masqué par des camions ou des bâtiments, le radar a du mal avec les détails fins, et les capteurs de mouvement dérivent lentement s’ils sont utilisés seuls. Pour obtenir une image fiable du trafic environnant, le véhicule doit fusionner ces vues imparfaites en une estimation cohérente de la position et du mouvement des objets. Un outil mathématique appelé filtre de Kalman est devenu un cheval de bataille pour réaliser cela en temps réel, mais dans sa forme classique il s’exécute sur des processeurs numériques qui consomment de l’énergie et introduisent des délais en transférant à plusieurs reprises des données entre capteurs analogiques et logique numérique.

Un nouveau type de brique électronique
Les auteurs abordent ce problème en utilisant un dispositif construit à partir d’une couche atomique du semi-conducteur disulfure de molybdène (MoS2). Leur memtransistor combine les rôles d’élément mémoire et de transistor en une structure à trois bornes dont la conductance électrique peut être réglée de façon continue puis conservée même en l’absence d’alimentation. En contrôlant soigneusement de minuscules lacunes dans le réseau atomique du matériau avec des champs électriques, le dispositif peut retenir de manière fiable 1024 niveaux de conductance distincts sur une large plage, et les conserver pendant plus d’un an. Tout aussi important, ces niveaux varient de façon presque linéaire lorsque la tension de commande est balayée, ce qui permet d’encoder directement un poids mathématique voulu dans le filtre de Kalman sous la forme d’un réglage physique du memtransistor.
Transformer les mathématiques en matériel
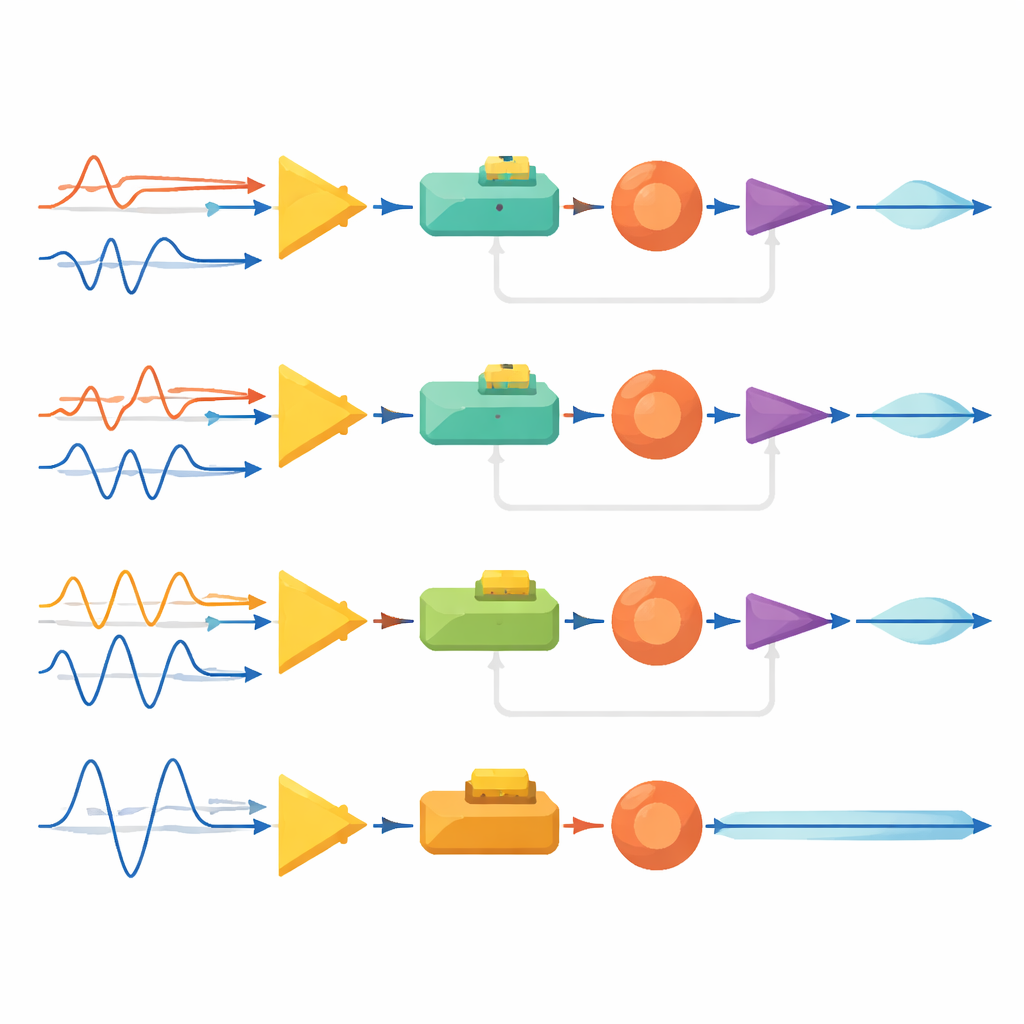
En s’appuyant sur ce dispositif, les chercheurs conçoivent une version analogique d’un filtre de Kalman multi-étages qui opère directement sur les tensions des capteurs plutôt que sur des nombres numériques. Le circuit se compose de trois étages en chaîne qui estiment la position, la vitesse et l’accélération d’un véhicule. Au sein de chaque étage, des opérations de base telles que la soustraction, l’intégration, l’addition et la différenciation sont réalisées par des modules analogiques compacts. Le facteur de “gain” crucial qui indique au filtre dans quelle mesure il doit faire confiance aux nouvelles mesures plutôt qu’à ses propres prédictions est implémenté grâce à la conductance du memtransistor. En ajustant simplement une tension de grille, le système peut modifier en douceur l’importance accordée au LiDAR, au radar ou aux capteurs de mouvement, sans réécrire un seul ligne de code.
Scénarios de conduite et conditions difficiles
Pour montrer le fonctionnement en pratique, l’équipe implémente le filtre complet à trois étages sur une carte électronique peuplée de leurs dispositifs en MoS2 et de composants analogiques standard. Ils injectent des signaux réalistes et bruités qui imitent ce que verraient le LiDAR, le radar et les capteurs de mouvement lors d’une manœuvre de dépassement par changement de voie sur autoroute. Au fur et à mesure que les signaux traversent chaque étage, les sorties deviennent plus propres, fournissant des estimations cohérentes de la position, de la vitesse et de l’accélération tout en préservant les variations nettes importantes pour la sécurité, comme un freinage brutal. Le système est particulièrement impressionnant lorsqu’un capteur devient peu fiable ou est obstrué — par exemple lorsqu’un camion cache temporairement un autre véhicule au LiDAR. En réduisant le gain associé au capteur compromis dans le matériel, le filtre analogique déplace automatiquement sa confiance vers les entrées restantes et vers les motifs de mouvement antérieurs, gardant les estimations de vitesse et d’accélération lisses et physiquement plausibles.
Des cerveaux plus rapides et plus économes pour les machines
Comparé à une implémentation numérique standard de la même tâche de filtrage, le système analogique à base de memtransistor utilise environ 13 fois moins d’énergie et effectue ses calculs environ 59 fois plus rapidement, tout en traitant simultanément trois variables de mouvement clés. Comme les dispositifs sont compacts, stables et compatibles avec une fabrication à grande échelle, cette approche suggère de futurs blocs de traitement « in-sensor » ou « near-sensor » qui pourraient être placés près des caméras et des radars dans les voitures, les drones et autres machines connectées. Pour les non-spécialistes, la conclusion est qu’en laissant la physique des matériaux avancés effectuer une partie des calculs, les ingénieurs peuvent construire des « cerveaux » électroniques plus intelligents, plus rapides et plus efficaces qui aident les systèmes autonomes à naviguer de façon fiable même lorsque la vision du monde est loin d’être parfaite.
Citation: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Mots-clés: conduite autonome, fusion de capteurs, filtre de Kalman, memtransistor, informatique analogique