Clear Sky Science · fr
Gestion des déchets intelligente et efficace grâce à l’apprentissage profond IoT sans fil
Pourquoi le tri des déchets high-tech compte
La plupart d’entre nous jettent leurs déchets dans une poubelle et n’y pensent plus, mais ce qui se passe ensuite façonne notre environnement, notre santé et même les budgets municipaux. Partout dans le monde, des tas croissants d’ordures mélangées rendent le recyclage plus difficile et remplissent davantage les décharges. Cet article examine comment des caméras, des capteurs sans fil et un type d’intelligence artificielle peuvent s’associer pour identifier le type de déchets que nous jetons et les diriger automatiquement vers le bon emplacement, rendant le parcours de nos déchets plus intelligent et plus sûr.
Le défi croissant des déchets quotidiens
Les villes génèrent aujourd’hui des milliards de tonnes de déchets solides chaque année, et ce volume devrait augmenter fortement d’ici le milieu du siècle. Dans de nombreuses régions, des travailleurs trient encore les déchets à la main, une tâche lente, coûteuse et risquée qui les expose à des objets tranchants, des fumées et des maladies. Les outils informatiques existants ont tenté d’aider, mais beaucoup peinent face à l’aspect désordonné et varié des déchets réels. Ils peuvent supposer que les données se comportent de manière simple et ordonnée, ou être trop lourds et lents pour fonctionner dans des systèmes pratiques installés dans des poubelles, des camions ou des centres de tri.
Des yeux intelligents et des machines connectées
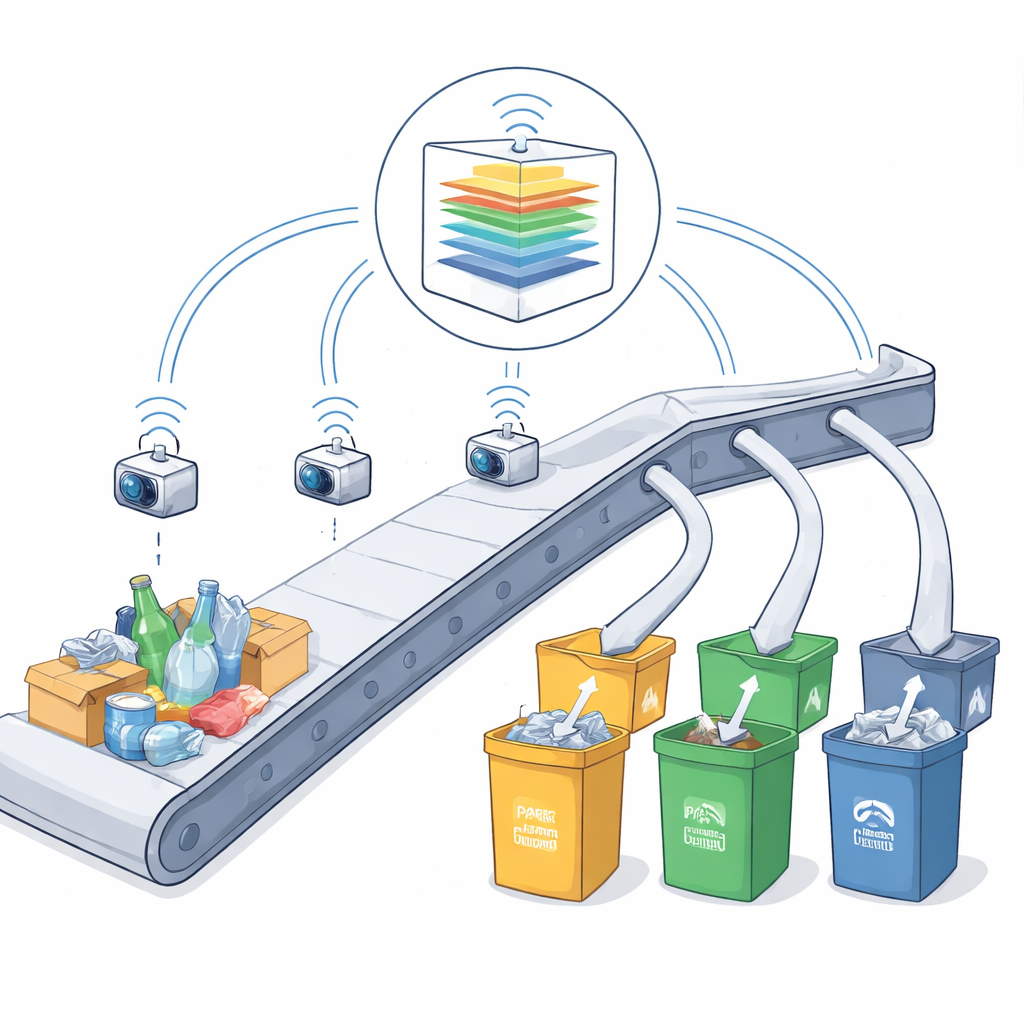
L’étude propose une installation complète de tri des déchets combinant trois ingrédients principaux : des caméras en réseau, un ordinateur central et une ligne de tri mécanique. Des caméras haute résolution placées près des points de collecte capturent des images de chaque objet se déplaçant sur un convoyeur. Un microcontrôleur à proximité prétraite ces images et les envoie sans fil à un ordinateur plus puissant. Là, un modèle de reconnaissance d’images examine chaque photo et décide si elle montre du carton, du verre, du métal, du papier, du plastique ou des déchets généraux. En fonction de cette décision, des signaux de commande actionnent des clapets, des convoyeurs ou des bras robotiques pour que chaque objet tombe dans la bonne benne, le tout en temps réel sans intervention humaine.
Comment le moteur d’apprentissage voit vos déchets
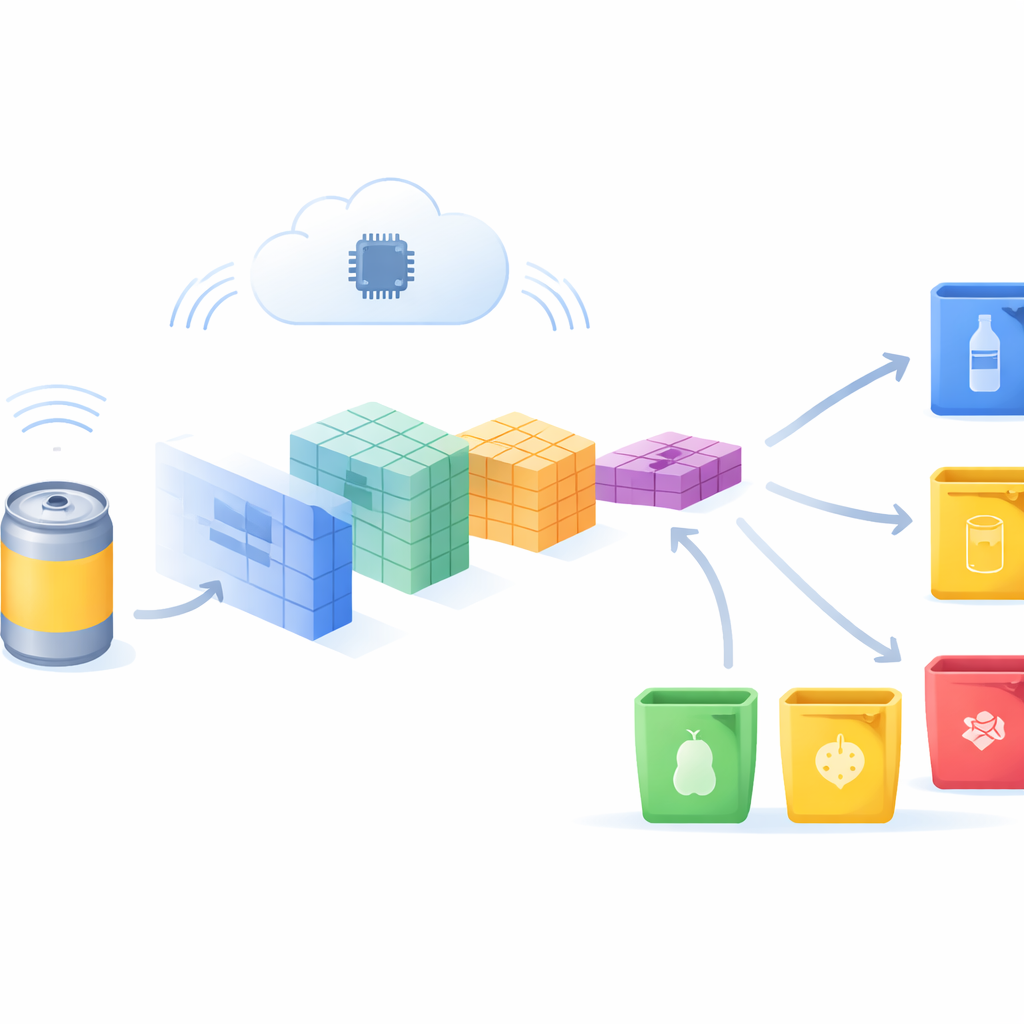
Au cœur du système se trouve un moteur de détection de motifs en couches, inspiré du fonctionnement de la vision chez les animaux. Les premières couches de ce moteur se concentrent sur des caractéristiques simples comme les contours et les textures, tandis que les couches profondes combinent ces éléments en formes plus complexes correspondant à des bouteilles, des boîtes ou des canettes. Les chercheurs ont entraîné ce moteur sur une collection publique de plus de 2 400 photos étiquetées montrant les six types de déchets dans de nombreuses formes, tailles et conditions d’éclairage. Pendant l’entraînement, ils lui ont montré ces exemples à plusieurs reprises, légèrement modifiés par des rotations, des zooms et des retournements, afin qu’il ne soit pas trompé par de petits changements de point de vue. Ils ont également utilisé des techniques de régularisation qui désactivent aléatoirement des parties du modèle durant l’entraînement pour l’empêcher de mémoriser le jeu de données et l’aider à faire face à de nouvelles images non vues auparavant.
Ce qui a bien fonctionné et ce qui le fait encore trébucher
Lors des tests sur des images distinctes, le système a correctement étiqueté un peu plus de la moitié des objets au total — modeste à première vue, mais une nette amélioration par rapport à de nombreuses approches plus anciennes fondées sur des règles ou des modèles plus simples. Il s’est montré particulièrement performant pour repérer le carton et le papier, captant la majorité de ces éléments et déclenchant rarement de fausses alertes. Le système a correctement identifié le métal, le verre et les déchets mélangés de manière raisonnable, mais a eu plus de difficultés avec le plastique, qu’il confondait souvent avec d’autres matériaux brillants ou froissés. Une analyse plus fine des erreurs a montré que les objets qui se ressemblent à l’œil nu — comme les canettes en métal et les bouteilles en verre, ou différents types d’emballages plastiques — sont également difficiles à distinguer pour le modèle en n’utilisant que des images couleur standard.
Vers des villes plus propres et plus intelligentes
En termes simples, ce travail montre qu’une ligne de tri basée sur des caméras et connectée sans fil, pilotée par des logiciels modernes de reconnaissance de motifs, peut déjà prendre en charge une grande partie du travail sale du tri des déchets ménagers. Si la version actuelle n’est pas parfaite, notamment pour les plastiques difficiles, elle prouve que de tels systèmes peuvent fonctionner en continu, s’adapter à des flux importants de déchets et être ajustés à de nouvelles conditions. Avec des données d’entraînement plus riches, des conceptions de modèles améliorées et éventuellement des méthodes de détection supplémentaires, les versions futures pourraient trier avec plus de précision et de fiabilité. Cela se traduirait par moins de contamination dans le recyclage, moins de dangers pour les travailleurs et une voie plus durable pour les sacs ordinaires de déchets que nous sortons chaque jour.
Citation: Latha, P., Benni, N.S., Asuti, M.G. et al. Smart and efficient waste management through wireless IoT-enabled deep learning. Sci Rep 16, 11118 (2026). https://doi.org/10.1038/s41598-026-43827-8
Mots-clés: gestion intelligente des déchets, IoT, apprentissage profond, recyclage automatisé, tri des déchets par image