Clear Sky Science · fr
Pipeline TinyML pour une classification efficace des fissures lors d’inspections de la santé structurelle par UAV
Des yeux plus intelligents dans le ciel
Les ponts, barrages et autres structures critiques vieillissent comme les êtres humains, et de petites fissures peuvent être des signaux précoces de défaillances futures. Les ingénieurs envoient de plus en plus de petits drones photographier ces surfaces, mais aujourd’hui beaucoup de ces images doivent être transmises à des serveurs distants pour analyse, ce qui consomme la batterie et pose des risques pour la confidentialité des données. Cet article explore comment réduire le « cerveau » détecteur de fissures en une puce minuscule consommant quelques milliwatts et embarquée sur le drone lui‑même, rendant les inspections plus rapides, plus sûres et bien plus efficaces.
Pourquoi les fissures importent
Les méthodes traditionnelles de suivi de la santé des structures reposent souvent sur des capteurs en contact vissés ou collés sur le béton et l’acier. Ces systèmes peuvent être coûteux à installer et tendent à détecter les problèmes seulement après que les dommages ont progressé. L’inspection visuelle offre une vue plus directe, mais envoyer des inspecteurs humains sur des échafaudages ou dans des voies de circulation est lent, risqué et subjectif. Les petits véhicules aériens sans pilote (UAV) équipés de caméras promettent une meilleure approche : ils peuvent balayer rapidement des tabliers de ponts et des parois, capturant des milliers de photos détaillées révélant des fissures capillaires. Le défi est de savoir quoi faire de toutes ces données lorsque le drone dispose d’une autonomie limitée et de connexions réseau souvent peu fiables.
Le problème d’envoyer tout vers le cloud
La plupart des systèmes actuels suivent un schéma « acquisition en bordure – inférence dans le cloud ». Le drone agit simplement comme une caméra volante, diffusant des images vers une machine puissante ailleurs qui exécute un modèle d’apprentissage profond pour décider si chaque portion de béton contient une fissure. Cette approche a du sens sur le plan informatique, mais comporte d’importants inconvénients. La transmission d’images de haute qualité épuise la batterie du drone, réduisant drastiquement le temps de vol. Si la liaison sans fil tombe ou s’affaiblit, la mission d’inspection peut s’arrêter au pire moment. Et l’envoi d’images détaillées d’infrastructures stratégiques vers des serveurs distants soulève des préoccupations légitimes de confidentialité et de sécurité. Ces tensions motivent une autre approche : placer l’intelligence directement sur le drone, sur un matériel à peine plus puissant qu’une montre numérique.
Réduire le cerveau pour l’adapter à une puce minuscule
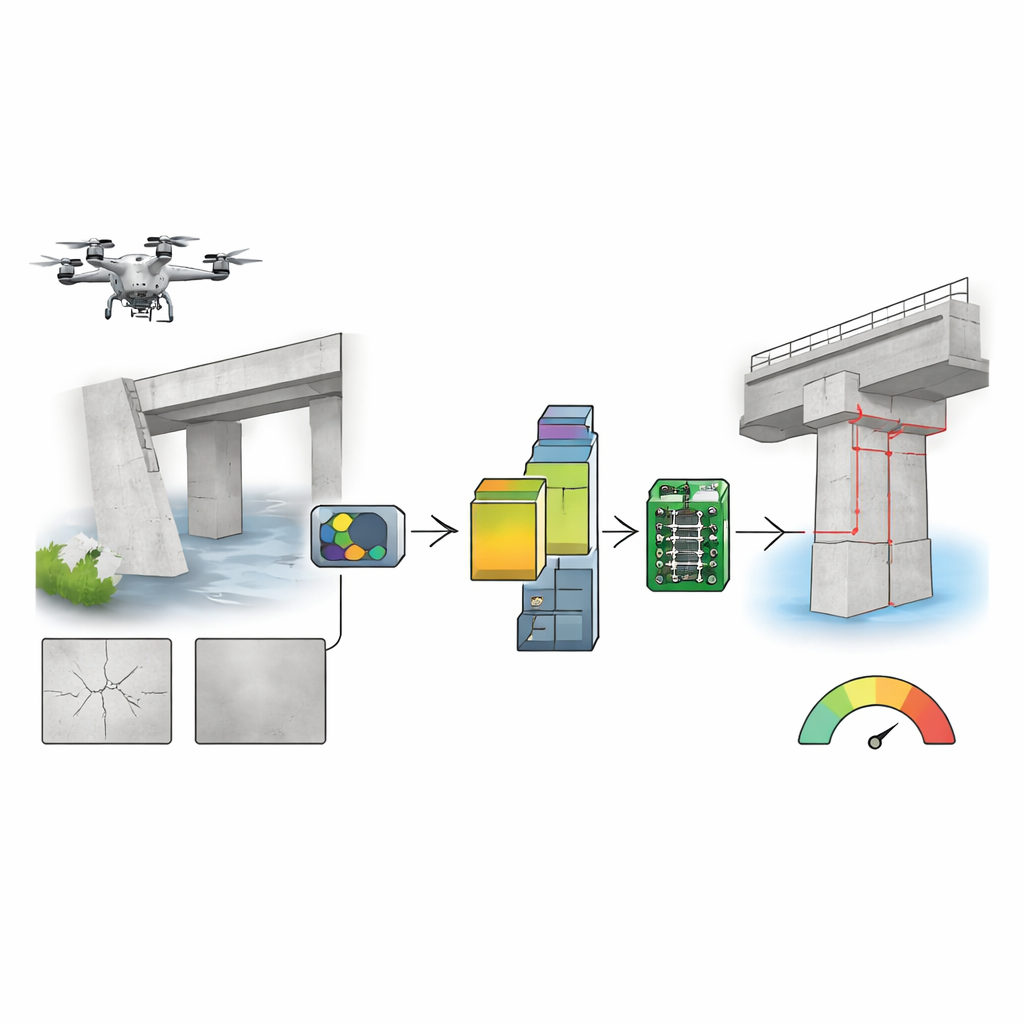
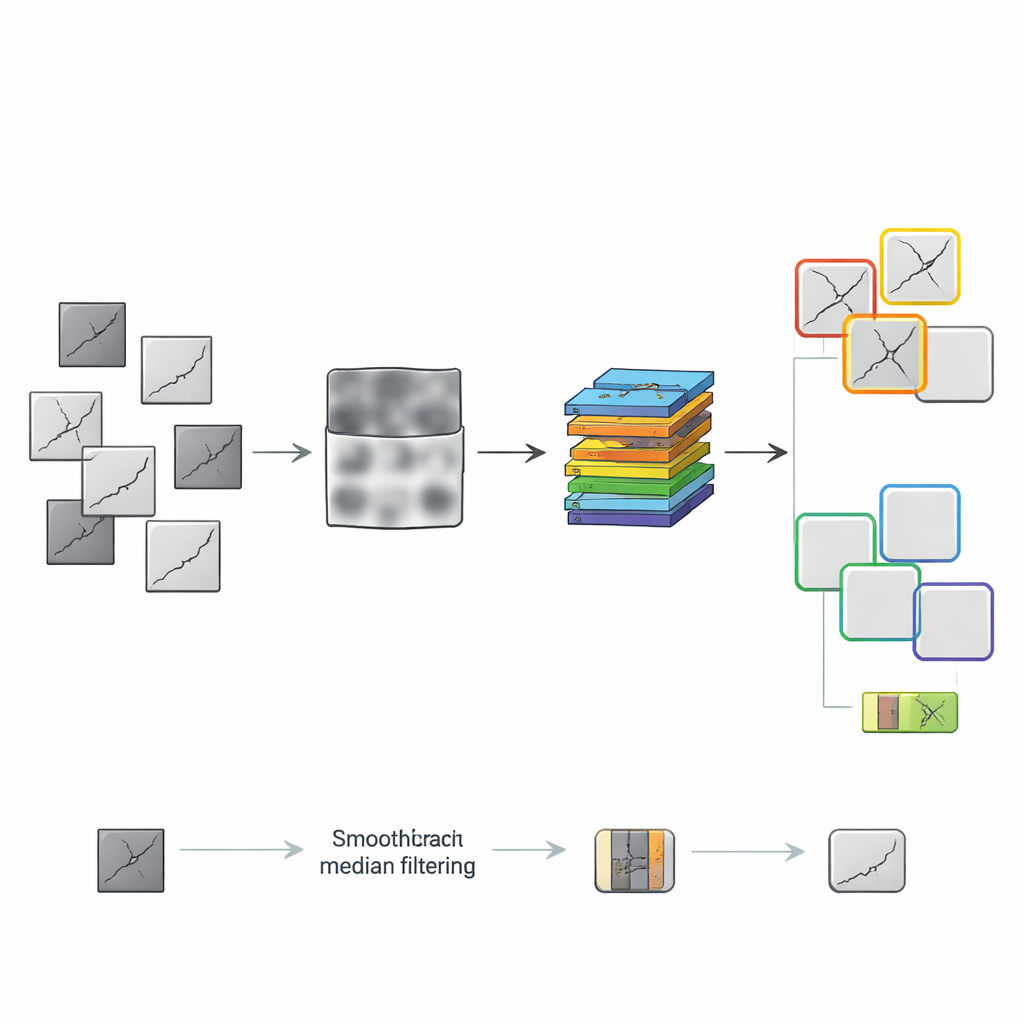
Les auteurs ont construit une chaîne de traitement de bout en bout qui s’exécute sur un microcontrôleur basse consommation, le STM32H7, en utilisant un réseau neuronal compact appelé MobileNetV1x0.25. Plutôt que d’inventer un nouveau modèle, ils se sont concentrés sur tout ce qui l’entoure : comment les images sont prétraitées et comment le modèle est compressé. Ils ont utilisé un jeu de données largement étudié de plus de 50 000 images de béton, découpées en petits patchs étiquetés « fissure » ou « pas de fissure », puis ont entraîné et testé différentes façons de préparer ces patchs pour le petit modèle. Une voie a suivi une séquence manuelle d’étapes telles que conversion en niveaux de gris, augmentation du contraste, suppression du bruit, lissage, et enfin transformation en silhouettes noir‑et‑blanc marquées. Une autre voie a laissé une stratégie de recherche « gourmande » construire une chaîne de prétraitement pas à pas, en conservant toujours la combinaison qui améliorait effectivement les performances du modèle.
Trouver le juste équilibre dans la chaîne
Les tests ont révélé que plus de traitement n’est pas toujours mieux. La chaîne manuelle, qui finissait par une binarisation sévère, a en réalité nui au réseau neuronal, supprimant des dégradés subtils nécessaires pour détecter les fissures fines. En revanche, la recherche gourmande a trouvé qu’une paire d’étapes plus simple — conversion en niveaux de gris suivie d’un filtrage médian pour lisser doucement le bruit — produisait les meilleurs résultats. Par ailleurs, l’équipe a exploré systématiquement quatre manières de compresser le modèle : conversion des nombres en entiers huit bits, entraînement en simulant la quantification, élagage des poids moins importants, et regroupement (clustering) des valeurs de poids similaires. Ils ont testé ces techniques isolément et en combinaisons, puis déployé les modèles résultants sur la carte du microcontrôleur et mesuré non seulement l’exactitude, mais aussi l’utilisation mémoire, le temps de traitement et l’énergie par décision.
Petit ordinateur, grandes performances
Une configuration s’est dégagée comme le meilleur compromis global : une entrée niveaux de gris plus filtrage médian alimentant un modèle combinant élagage et entraînement conscient de la quantification au format huit bits. Ce dispositif compact a atteint un score F1 — équilibre entre détection des vraies fissures et évitement des fausses alertes — de 0,938, soit un gain de plus de 11 points de pourcentage par rapport aux détecteurs de fissures antérieurs embarqués. Dans le même temps, il nécessitait seulement environ 2,9 mégaoctets de mémoire de travail, 309 kilo-octets de stockage programme, et moins d’une demi‑seconde pour traiter chaque patch d’image. Chaque décision consommait environ 0,6 joule d’énergie. Monté sur un drone DJI Mini 4 Pro, exécuter en continu ce classificateur de fissures réduirait le temps de vol d’environ 4 pour cent seulement, contre environ un quart de la batterie consommée par des cartes d’edge computing populaires et bien plus lourdes.
Ce que cela signifie pour les inspections en conditions réelles
Pour les non‑spécialistes, le message clé est que des évaluations structurelles sérieuses ne nécessitent plus l’envoi d’images sensibles vers des centres de données lointains ni le transport d’ordinateurs encombrants et énergivores dans les airs. En ajustant soigneusement la façon dont les images sont nettoyées et comment le réseau neuronal est compressé, les auteurs montrent qu’une puce de la taille d’un pouce peut repérer de manière fiable des fissures dans le béton tout en consommant à peine la batterie du drone. Le système reste raisonnablement robuste au flou de mouvement et aux variations d’éclairage, et il se comporte de manière sensée même lorsque les images de fissures sont rares parmi de nombreux patchs sains. Ensemble, ces résultats rapprochent les inspections par drone d’un avenir où des essaims de petits UAVs peu coûteux pourront patrouiller discrètement nos infrastructures, repérant tôt les problèmes grâce à une intelligence embarquée à la fois intelligente et efficace.
Citation: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
Mots-clés: inspection par drone, fissures du béton, tiny machine learning, surveillance de la santé structurelle, IA embarquée