Clear Sky Science · fr
Contrôle indépendant du matériel pour la simulation de gravité partielle avec un dispositif robotique à 2 DDL
Pourquoi une gravité allégée sur Terre compte
À mesure que l’humanité planifie des voyages plus longs vers la Lune et Mars, il devient urgent de comprendre comment des niveaux de gravité différents affecteront le corps. Réaliser ces tests dans l’espace est coûteux et rare ; les scientifiques utilisent donc sur Terre des machines spéciales tournantes, appelées clinostats, pour imiter la faible gravité pour des cellules et de petits tissus. Cet article présente une nouvelle façon de contrôler un tel appareil afin qu’il puisse reproduire de manière fiable non seulement l’apesanteur, mais aussi les attractions plus faibles de la Lune, de Mars, et même des niveaux de gravité proches de celui de la Terre — sans être étroitement lié à un moteur ou à un composant matériel précis.
Tourner pour simuler la gravité
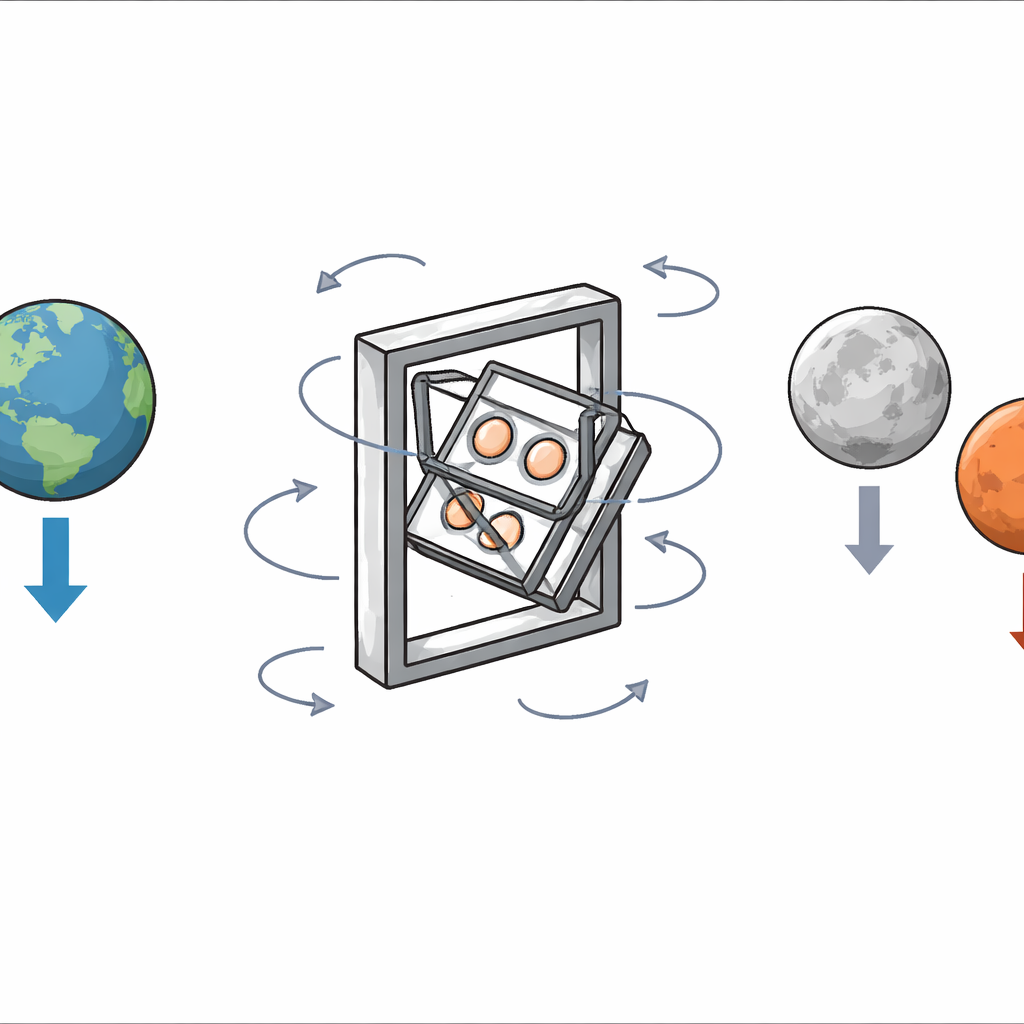
Près de la surface de la Terre, la gravité pointe presque toujours vers le bas. Un clinostat tridimensionnel prend un petit échantillon — comme des cellules ou des organoïdes dans une boîte de Pétri — et le fait tourner lentement autour de deux axes perpendiculaires. Comme l’orientation de l’échantillon change constamment, la direction de la gravité « vue » par les cellules varie, et ces variations se moyennent avec le temps. Lorsque les rotations sont arrangées correctement, la gravité moyenne dans le temps peut approcher zéro, imitant la microgravité en orbite. Pendant de nombreuses années, cette idée simple a servi à étudier la perte musculaire, l’affaiblissement des os, les changements immunitaires et d’autres effets proches de ceux observés dans l’espace sans quitter le sol.
De l’apesanteur à une gravité « lunaire »
Plus récemment, les chercheurs ont compris qu’il ne suffit pas d’étudier l’apesanteur. Les astronautes sur la Lune ou Mars vivront avec une gravité plus faible, mais non absente. Pour combler cet écart, le concept de gravité partielle simulée moyennée dans le temps a été introduit : au lieu de faire disparaître la traction moyenne, l’appareil laisse la gravité pointer légèrement plus souvent dans une direction que dans les autres. Ce biais crée une traction moyenne située entre zéro et la gravité terrestre complète, permettant d’imiter des conditions telles que 0,17 g sur la Lune ou 0,38 g sur Mars. Les méthodes de contrôle antérieures pouvaient le faire, mais elles dépendaient fortement des moteurs et de la mécanique utilisés, et elles ne pouvaient pas produire de gravité partielle supérieure à environ 0,44 g.
Une nouvelle façon de piloter le rotor
L’innovation centrale de cette étude est de commander le moteur extérieur du clinostat en fonction de son angle, plutôt qu’en fonction du temps. Les méthodes précédentes prescrivaient la vitesse du moteur à chaque instant, mais le matériel réel ne suit jamais parfaitement ce plan : de petits retards et des limites du moteur font dériver l’angle, et ces erreurs s’accumulent, obligeant les chercheurs à ajouter des boucles de rétroaction supplémentaires adaptées à chaque appareil. Ici, les auteurs redessinent la règle de commande de sorte que la vitesse angulaire soit donnée directement en fonction de l’angle courant. Ce changement apparemment mineur réduit considérablement la croissance des erreurs et rend la méthode en grande partie indépendante de la puissance et de l’inertie du moteur. Parallèlement, le moteur intérieur est piloté selon un motif de type aléatoire afin que la gravité ne suive pas sans cesse le même trajet, ce qui améliore la fiabilité expérimentale.
Approcher la gravité terrestre
À l’aide de simulations numériques, l’équipe a cartographié comment un paramètre clé de commande, appelé α, affecte la gravité moyenne finale. En augmentant α, ils ont pu élever la gravité partielle simulée jusqu’à environ 0,68 g — bien plus que la limite antérieure de 0,44 g. Pour aller plus loin, ils ont introduit une astuce de « temps de repos » : chaque fois que le châssis extérieur atteint l’angle où la gravité s’aligne avec la traction moyenne désirée, le moteur s’arrête brièvement. Pendant cette pause, l’échantillon subit une traction stable dans cette direction, renforçant le biais. Les simulations ont montré que des pauses plus longues rapprochent la gravité effective de 1 g terrestre, et les expériences ont confirmé des valeurs jusqu’à environ 0,81 g avec seulement environ 1 % d’écart par rapport aux résultats prédits dans la plage la plus précise.
Tester la Lune, Mars et au-delà
Les chercheurs ont construit un clinostat à deux axes entraîné par des servomoteurs commerciaux et ont surveillé la direction de la gravité à l’aide d’un capteur inertiel monté au centre. Ils ont testé une gamme de valeurs de α et de temps de repos, mesurant la rapidité avec laquelle la gravité moyenne se stabilisait et la concordance entre expériences et simulations. Pour des valeurs modérées de α correspondant à 0,33–0,63 g, le décalage était typiquement d’environ 1 % ou moins. Les simulations et les expériences pour des configurations lunaires et martiennes ont produit des tractions moyennes proches de 0,17 g et 0,38 g, tout en conservant des trajectoires de gravité variées d’un essai à l’autre. Les auteurs ont également exploré les limites pratiques imposées par la résolution des moteurs et les délais de réponse, et proposent des recommandations simples pour choisir les actionneurs et des marges de sécurité afin que d’autres laboratoires puissent reproduire des niveaux précis de gravité partielle.
Ce que cela signifie pour la santé spatiale future
En termes simples, ce travail transforme un dispositif de rotation complexe et sensible au matériel en un simulateur de gravité partielle plus « plug‑and‑play ». En liant la vitesse du moteur à l’angle et en ajoutant des pauses contrôlées, la méthode peut imiter fidèlement une large gamme de niveaux de gravité, de l’espace profond à la Lune et Mars et jusqu’à la Terre, sans réglage manuel constant des boucles de contrôle. Cette flexibilité facilite pour de nombreux groupes de recherche l’étude de la réponse des cellules, tissus et organoïdes à des niveaux de gravité spécifiques, aidant à prévoir les risques pour la santé et à concevoir des contre‑mesures pour les missions spatiales de longue durée.
Citation: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Mots-clés: simulation de gravité partielle, clinostat, biologie spatiale, recherche en microgravité, contrôle du mouvement robotique