Clear Sky Science · fr
Estimation quantitative du noyau de flou à partir de panneaux de signalisation en utilisant la réponse en fréquence spatiale d’arête inclinée comme métrique de netteté
Pourquoi les caméras floues des voitures importent
Les voitures modernes s’appuient de plus en plus sur des caméras pour détecter les piétons, lire les panneaux de signalisation et maintenir les véhicules dans leur voie. Mais, comme la vision humaine, la vision des caméras peut se dégrader lentement avec l’âge, la chaleur, les vibrations ou de légers déplacements d’assemblage. Cet article explore une nouvelle façon de « mesurer » le degré de flou d’une caméra automobile en examinant des panneaux de signalisation courants, ce qui permettrait aux constructeurs de suivre l’état des caméras au fil du temps plutôt que d’attendre des défaillances.
Transformer les panneaux de signalisation en cibles de test
En usine, la netteté des caméras est vérifiée sur des motifs de test spéciaux avant l’expédition d’un appareil. Sur la route, en revanche, il n’existe pas de cible contrôlée—seul le monde réel. Les auteurs exploitent un objet commun et reproductible dans ce monde : les panneaux de signalisation présentant des arêtes nettes et à fort contraste. Ils se concentrent sur une mesure standard de netteté appelée réponse en fréquence spatiale (SFR), qui indique essentiellement dans quelle mesure une caméra préserve les détails fins d’une image. En analysant des arêtes légèrement inclinées (« slanted ») sur les panneaux, ils peuvent calculer la SFR de façon similaire aux tests en laboratoire, mais directement à partir de scènes de conduite réelles.

Capturer la façon dont une lentille répartit la lumière
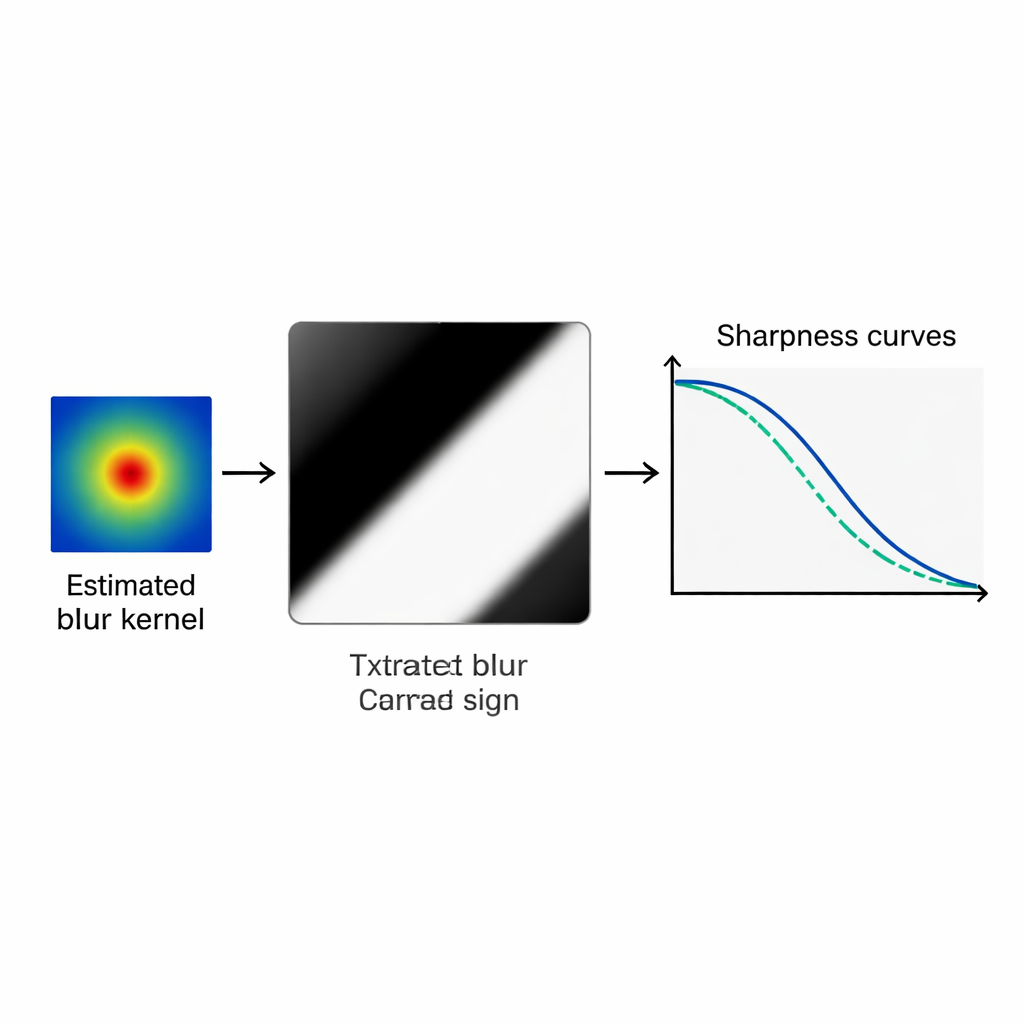
Le flou d’une caméra peut être décrit par une petite image appelée noyau de flou, ou fonction d’étalement du point. Elle montre comment la lumière émise par un point unique de la scène se répartit sur les pixels voisins du capteur. Estimer ce noyau directement à partir d’une photo floue est normalement très difficile, car de nombreuses combinaisons possibles d’image nette et de motif de flou peuvent produire un résultat similaire. Pour s’attaquer à ce problème, les chercheurs utilisent d’abord un logiciel de conception optique pour simuler environ 1300 noyaux de flou réalistes pour une caméra automobile spécifique, couvrant différents réglages de mise au point et positions dans l’image. Ils compressent ensuite ce grand ensemble en un jeu compact de motifs clés à l’aide d’un outil statistique appelé analyse en composantes principales (ACP), de sorte que tout flou réaliste peut être décrit par seulement quelques dizaines de nombres au lieu de centaines de valeurs de pixels.
Appairer des courbes de netteté plutôt que des pixels
Une fois le « dictionnaire » compact de flous construit, le processus d’estimation démarre avec deux petits patchs, chacun de 45 × 45 pixels, extraits d’une image de panneau floue, ainsi que des patchs correspondants issus d’une image de référence nette du même panneau. Pour un noyau de flou candidat issu du modèle ACP, les patchs nets sont artificiellement floutés et leurs courbes de SFR sont calculées. Ces courbes sont ensuite comparées aux courbes de SFR mesurées sur les patchs réellement flous. Une méthode d’optimisation globale connue sous le nom d’évolution différentielle ajuste les paramètres du noyau pour minimiser la différence entre les deux ensembles de courbes. En pratique, l’algorithme recherche le motif de flou qui aligne au mieux les courbes de netteté synthétiques sur celles mesurées dans l’image réelle de la caméra.
Quelle est l’efficacité de la méthode ?
Les auteurs testent d’abord leur méthode sur des données synthétiques, où les noyaux de flou véritables sont connus exactement. Sur dix niveaux de flou différents, de très net à visiblement défocalisé, les noyaux estimés correspondent de près à la vérité terrain selon plusieurs mesures de similarité indépendantes, avec des valeurs de similarité structurelle typiquement supérieures à 0,95 et des erreurs moyennes très faibles. Ils comparent également leur approche aux techniques récentes de « défloutage aveugle » en vision par ordinateur, conçues principalement pour améliorer l’apparence des images plutôt que pour récupérer la forme exacte du flou. Pour la tâche de reconstruction précise du noyau sous-jacent pour cette caméra spécifique, la nouvelle méthode basée sur l’ACP surpasse clairement ces références. Enfin, ils appliquent l’algorithme à des images réelles provenant d’une caméra automobile modifiée dont le capteur peut être déplacé par petits incréments pour induire une défocalisation connue. Bien que les noyaux véritables ne soient pas disponibles dans ce cas, les noyaux estimés produisent des arêtes synthétiques dont les courbes de netteté et l’apparence visuelle restent très proches des arêtes réellement floues sur une large plage de réglages de mise au point.
De la technique de laboratoire au contrôle de l’état des caméras
Pour les non-spécialistes, le résultat principal est que les auteurs peuvent désormais transformer des panneaux de signalisation ordinaires en un outil diagnostique révélant comment l’optique d’une caméra automobile évolue dans le temps, et pas seulement si une image semble nette ou floue. Plutôt qu’un simple indicateur pass/fail, le noyau de flou estimé encode des informations détaillées sur la façon dont la lumière se propage à l’intérieur de l’objectif, ce qui peut être relié à la défocalisation ou à des imperfections optiques spécifiques. Bien que la méthode actuelle soit lourde en calcul et ne fonctionne que sur de petits patchs autour d’arêtes nettes, elle ouvre la voie à des systèmes futurs dans lesquels des images occasionnelles seraient envoyées depuis les véhicules à un serveur qui suit la détérioration lente de la netteté des caméras. Cela pourrait informer la maintenance préventive, soutenir des systèmes avancés d’aide à la conduite plus sûrs et, en fin de compte, aider à garantir que les « yeux » numériques des véhicules autonomes restent en bonne santé pendant des années de service.
Citation: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
Mots-clés: caméras automobiles, netteté d’image, noyau de flou, imagerie des panneaux de signalisation, surveillance de la santé des caméras