Clear Sky Science · fr
Cartographie sémantique consciente des objets utilisant des fonctions de densité de probabilité pour la relocalisation intérieure et la planification de trajectoire
Pourquoi des cartes intérieures plus intelligentes importent
Au fur et à mesure que les robots domestiques et de service sortent des laboratoires pour entrer dans de vrais appartements, ils doivent faire plus que simplement éviter les murs et les meubles. Pour être réellement utiles, les robots devraient comprendre, par exemple, qu’un lit indique généralement une chambre, ou qu’un réfrigérateur signale une cuisine. Cet article présente une nouvelle manière pour les robots de « voir » les espaces intérieurs au travers des objets qui définissent chaque pièce, leur permettant de déterminer où ils se trouvent et de choisir des trajectoires mieux alignées avec l’usage humain des habitats.
Voir les pièces à travers leurs objets quotidiens
Les cartes classiques pour robots se concentrent soit sur la géométrie brute, soit sur des symboles abstraits. Les cartes en grille construites à partir de scans laser capturent des formes détaillées, mais deviennent lourdes à stocker et lentes à explorer, et poussent parfois les robots vers des trajectoires rigides en damier. Les graphes haut niveau de pièces et de portes sont plus faciles à manipuler, mais ils éliminent les détails fins nécessaires pour une conduite précise. Les auteurs comblent cet écart en organisant les cartes autour des pièces et des objets statiques clés qui s’y trouvent – lits, canapés, réfrigérateurs, tables et autres. Chaque pièce est délimitée sur un plan d’étage plat, et chaque classe d’objet importante dispose de sa propre couche, de sorte que différents types de mobilier ne s’écrasent pas mutuellement.
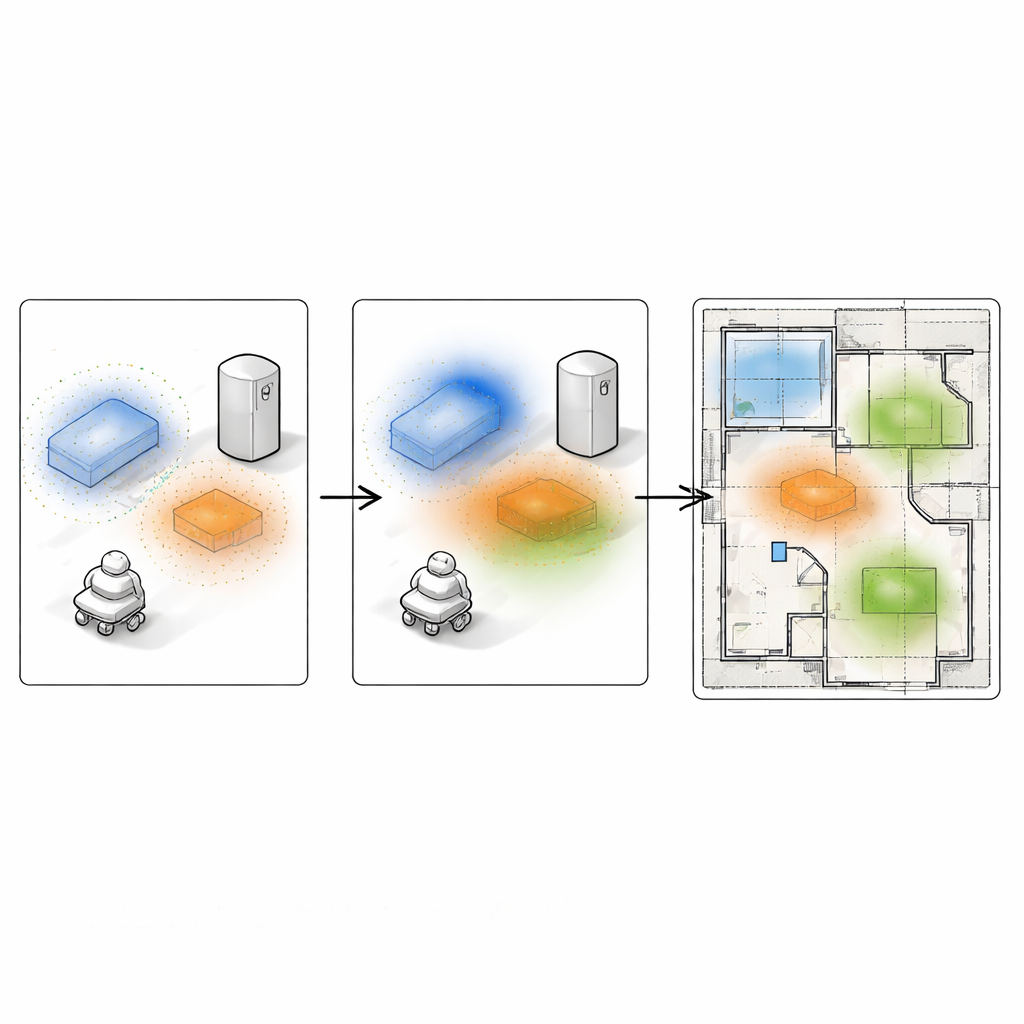
Transformer le mobilier en nuages de probabilité doux
Au lieu de représenter chaque objet par une boîte aux contours nets, la méthode convertit des scans 3D du mobilier en « cartes de chaleur » lisses sur le sol. Le robot reconstruit d’abord chaque pièce en 3D à l’aide d’une caméra RGB‑D et d’outils standards, puis étiquette sémantiquement les points appartenant à des objets comme les murs, lits ou chaises. Pour chaque type d’objet dans une pièce, des grappes de points sont détectées et projetées sur le plancher. À partir de ces grappes, le système estime une densité de probabilité continue – une tache douce qui est maximale là où l’objet est le plus probablement et qui décroît progressivement vers l’extérieur. Empiler ces taches par type d’objet produit une carte compacte et en couches qui conserve à la fois la signification des objets et leur forme approximative, tout en gérant naturellement le bruit et les vues partielles.
Permettre aux robots de redécouvrir où ils se trouvent
Un usage majeur de cette carte centrée sur les objets est d’aider un robot à se relocaliser lorsqu’il n’a aucune idée de sa position sur le plan d’étage – un problème courant quand le robot s’active ou a été déplacé. Le robot prend une nouvelle vue avec sa caméra de profondeur, détecte les objets visibles et construit son propre petit ensemble de taches de probabilité pour cette scène partielle. Ensuite, un algorithme de recherche évolutionnaire explore de nombreux poses robot possibles à travers la carte du bâtiment. Pour chaque pose candidate, les taches locales sont superposées sur la carte globale et leur similarité est mesurée à l’aide d’une distance statistique. Les limites de pièces et les vérifications de visibilité éliminent les poses impossibles, comme voir un réfrigérateur à travers un mur. Au fil de nombreuses générations, la population de poses candidates converge vers l’emplacement où les objets observés correspondent le mieux aux champs de probabilité stockés, fournissant une estimation robuste de la position et de l’orientation du robot.
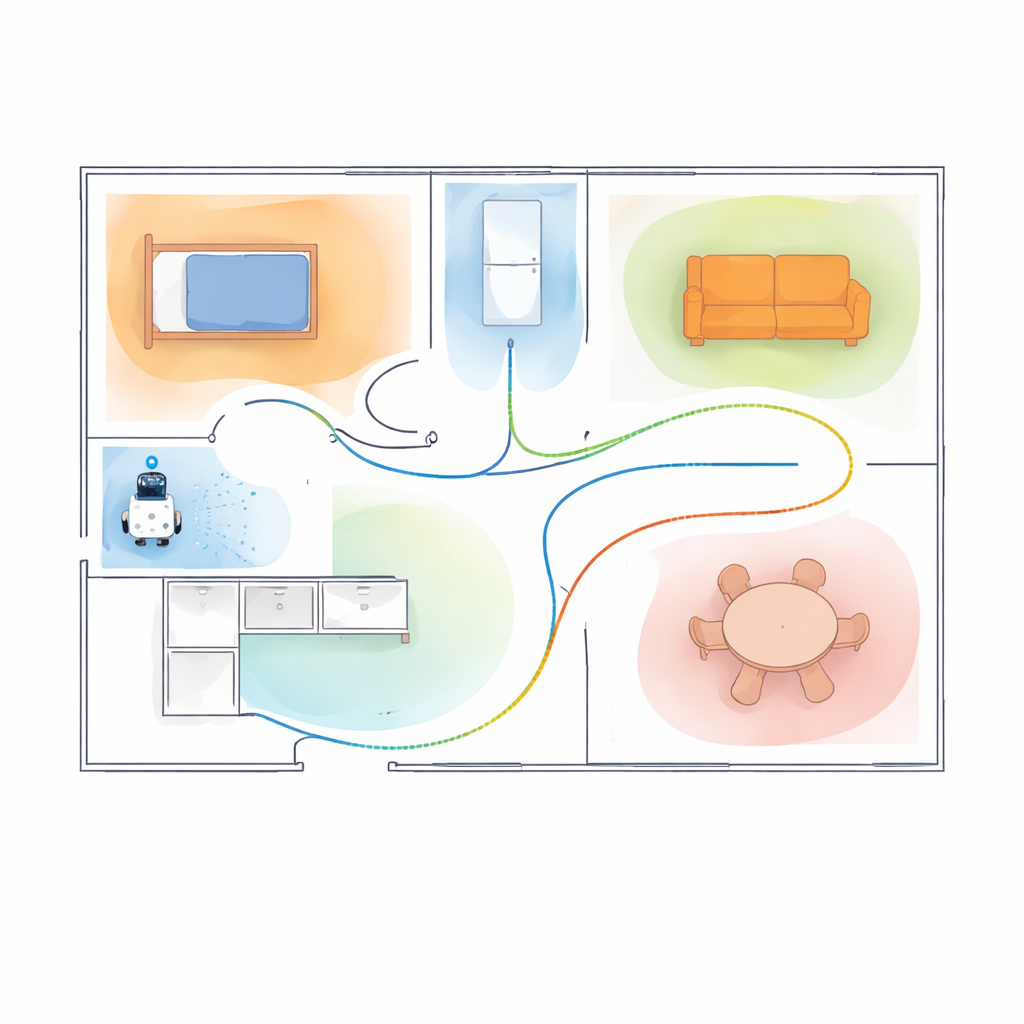
Planifier des trajectoires qui respectent l’usage de l’espace par les personnes
La même carte guide également les déplacements du robot. Parce que chaque type d’objet est représenté comme un champ d’influence lisse, on peut demander au robot de favoriser ou d’éviter certaines zones en ajustant des poids numériques. Les lits peuvent devenir des régions à contourner la nuit, tandis que les tables peuvent devenir des attracteurs lors de la recherche d’objets. Ces préférences sémantiques sont combinées avec une carte d’obstacles standard et une marge de sécurité autour des murs pour former un unique paysage de coût sur le plan d’étage. Un planificateur de trajectoire classique trouve alors des routes qui sont non seulement sans collision, mais aussi conformes aux préférences sociales ou liées à la tâche. Des expériences sur un jeu de données réaliste et dans un vrai appartement meublé montrent que ces trajectoires biaisées sémantiquement respectent mieux les préférences voulues, parfois au prix d’une légère augmentation de la longueur du trajet, et peuvent être plus fluides dans des logements réels.
Ce que cela signifie pour les robots du quotidien
En termes simples, ce travail apprend aux robots à percevoir les maisons comme les humains : comme des pièces définies par leur mobilier, et non seulement comme des boîtes vides avec des murs. En enveloppant chaque objet clé d’un nuage de probabilité doux, une seule carte compacte peut prendre en charge à la fois « Où suis‑je ? » et « Comment devrais‑je m’y rendre ? » sans nécessiter de modèles séparés spécifiques à chaque tâche. Les tests montrent que cette approche aide les robots à se localiser plus fiablement dans des pièces encombrées ou semblables entre elles et à choisir des itinéraires qui correspondent mieux aux attentes humaines. À mesure que ces idées mûriront, les futurs robots domestiques pourront naviguer de manière plus polie et intelligente, se déplaçant dans nos espaces avec une conscience qui paraît bien moins mécanique.
Citation: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Mots-clés: localisation de robot en intérieur, cartographie sémantique, navigation tenant compte des objets, cartes robotiques probabilistes, planification de trajectoire